


Ekinox-D Kompakte INS GNSS-Lösung mit Dualantenne
Ekinox-D ist ein All-in-One Inertial Navigation System mit integriertem RTK GNSS-Empfänger, ideal für Anwendungen, bei denen der Platzbedarf entscheidend ist. Dieses fortschrittliche INS/GNSS ist mit einer oder zwei Antennen erhältlich und bietet Orientierung, Seegang und eine zentimetergenaue Position auch bei GNSS-Ausfällen.
Eine IMU ist die Kernkomponente dieses Trägheitsnavigationssystems. Die Ekinox-D IMU nutzt die MEMS-Technologie und eine innovative, firmeneigene Integration und bietet eine außergewöhnliche Leistung bei gleichzeitig angemessenen Kosten. Darüber hinaus können ein DVL oder ein Odometersensor als Geschwindigkeitsunterstützung an die Ekinox-D angeschlossen werden.
Entdecken Sie alle Funktionen und Anwendungen der Ekinox-D.
Ekinox-D Eigenschaften
Ekinox-D integriert einen GNSS-Empfänger in Vermessungsqualität (L1/L2/L5 GPS, GLONASS, GALILEO, BEIDOU), der SBAS-, DGNSS- und RTK-Positionierung ermöglicht. Mit einer konfigurierbaren Aktualisierungsrate von 5 Hz bietet dieser Empfänger dank hochentwickelter Algorithmen zur automatischen Abschwächung, die Mehrwege-Situationen oder Inmarsat / Iridium-Störungen erkennen und beseitigen, höchste Genauigkeit und Zuverlässigkeit in rauen GNSS-Umgebungen.
Es bietet standardmäßig RTK-Positionierung sowie RAW-Datenunterstützung für zentimetergenaue Präzision in Echtzeit oder bei der Nachbearbeitung. Die Dual-Antenne ermöglicht eine präzise Kursbestimmung bei Anwendungen mit geringer Dynamik.
Der interne Dual-L-Band-Demodulator unterstützt Fugro Marinestar™ PPP-Dienste, um weltweit ohne spezielle Infrastruktur eine Positionierungsgenauigkeit von besser als 10 cm zu erreichen.
Weitere Informationen finden Sie in unseren Ekinox-D Spezifikationen.




Spezifikationen
Motion & Navigation Performance
1.2 m Vertikale Einzelpunktposition
1.2 m RTK-Horizontalposition
0.01 m + 0.5 ppm RTK vertikale Position
0,015 m + 1 ppm PPK horizontale Position
0,01 m + 0,5 ppm * Vertikale PPK-Position
0,015 m + 1 ppm * Einzelpunkt Rollen/Neigen
0.02 ° RTK Rollen/Neigen
0.015 ° PPK Rollen/Neigen
0,01 ° * Einzelpunkt-Kurs
0.05 ° RTK-Kurs
0.04 ° PPK-Kurs
0,03 ° *
Navigationsfunktionen
Einzel- und Dual-GNSS-Antenne Echtzeit-Seeganggenauigkeit
5 cm oder 5 % des Seegangs Echtzeit-Seegang-Wellenperiode
0 bis 20 s Echtzeit-Seegangmodus
Automatische Anpassung Verzögerte Heave-Genauigkeit
2 cm oder 2 % Verzögerte Seegangperiode
0 bis 40 s
Bewegungsprofile
Überwasserschiffe, Unterwasserfahrzeuge, Marinevermessung, Marine & raue Marine Luft
Flugzeuge, Hubschrauber, Luftfahrzeuge, UAV Land
Auto, Automobil, Zug/Eisenbahn, LKW, Zweiräder, schwere Maschinen, Fussgänger, Rucksack, Offroad
GNSS-Leistung
Interne geodätische Dual-Antenne Frequenzband
Duale Frequenz GNSS-Funktionen
SBAS, SP, RTK, PPK GPS-Signale
L1, L2, L5, L6 * Galileo-Signale
E1, E5a, E5b Glonass-Signale
L1 C/A, L2 C/A, L2P, L3 Beidou-Signale
B1I, B1C, B2a, B2I,B3I Andere Signale
Marinestar, CLAS, QZSS, Navic, L-Band * GNSS Time-to-First-Fix
< 45 s Jamming & Spoofing
Erweiterte Abschwächung & Indikatoren, OSNMA
Umweltspezifikationen & Betriebsbereich
IP-68 Betriebstemperatur
-40 °C bis 75 °C Vibrationen
3 g RMS – 20 Hz bis 2 kHz Stöße
500 g für 0,3 ms MTBF (berechnet)
50.000 Stunden Konform mit
MIL-STD-810, EN60945
Schnittstellen
GNSS, RTCM, Odometrie, DVL Ausgabeprotokolle
NMEA, Binär sbgECom, TSS, Simrad, Dolog Eingabeprotokolle
NMEA, Trimble, Novatel, Septentrio, Hemisphere, DVL (PD0, PD6, Teledyne, Nortel) Datenlogger
8 GB oder 48 h @ 200 Hz Ausgabefrequenz
Bis zu 200 Hz Ethernet
Vollduplex (10/100 Base-T), PTP Master Clock, NTP, Webinterface, FTP, REST API Serielle Schnittstellen
RS-232/422 bis zu 921kbps: 3 Ausgänge / 5 Eingänge CAN
1x CAN 2.0 A/B, bis zu 1 Mbps Sync OUT
PPS, Trigger bis zu 200 Hz, virtueller Wegstreckenzähler – 2 Ausgänge Sync IN
PPS, Odometersignal, Ereignismarkierung bis zu 1 kHz – 5 Eingänge
Mechanische & elektrische Spezifikationen
9 bis 36 VDC Leistungsaufnahme
6 W Antennenleistung
5 VDC – max. 150 mA pro Antenne | Verstärkung: 17 – 50 dB Gewicht (g)
600 g Abmessungen (LxBxH)
100 mm x 86 mm x 75 mm
Timing-Spezifikationen
< 200 ns PTP-Genauigkeit
< 1 µs PPS-Genauigkeit
< 1 µs (jitter < 1 µs) Drift in der Koppelnavigation
1 ppm

Ekinox-D Anwendungen
Ekinox-D wurde für hochpräzise Navigation und Echtzeitüberwachung in Land-, Schiffs-, Unterwasser- und Luftanwendungen entwickelt und gewährleistet genaue Daten auch unter schwierigsten Bedingungen.
In landgestützten Anwendungen bietet es eine zuverlässige Positionierung und Orientierung für Mobile Mapping, autonome Fahrzeuge und taktische Einsätze. Für Schiffs- und Unterwasserprojekte unterstützt es eine robuste Navigation und Schiffsführung, die für einen sicheren und effizienten Betrieb unerlässlich sind. In Luftanwendungen verbessert unser INS die Stabilität und Präzision für UAVs und bemannte Flugzeuge. Mit der Echtzeit-Leistungsüberwachung gewährleistet unser INS genaue, verwertbare Erkenntnisse in allen Umgebungen.
Entdecken Sie alle Anwendungen in verschiedenen Sektoren.
Ekinox-D Datenblatt
Erhalten Sie alle Sensorfunktionen und -spezifikationen direkt in Ihren Posteingang!
Vergleichen Sie Ekinox-D mit anderen Produkten
Vergleichen Sie unsere fortschrittlichste Inertialsensorreihe für Navigation, Bewegung und Seegangsmessung.
Die vollständigen Spezifikationen finden Sie im Hardware-Handbuch, das auf Anfrage erhältlich ist.

Ekinox-D |
||||
|---|---|---|---|---|
| RTK-Horizontalposition | RTK horizontale Position 0,01 m + 0,5 ppm | RTK horizontale Position 0,01 m + 1 ppm | RTK horizontale Position 0,01 m + 0,5 ppm | RTK horizontale Position 0.015 m + 1 ppm |
| RTK Rollen/Neigen | RTK Rollen/Neigen 0,015 ° | RTK Roll/Pitch 0,05 ° | RTK Rollen/Neigen 0,015 ° | RTK Rollen/Neigen 0,015 ° |
| RTK-Kurs | RTK-Kurs 0,04 ° | RTK Heading 0.2 ° | RTK-Kurs 0,05 ° | RTK-Kurs 0,05 ° |
| GNSS-Empfänger | GNSS-Empfänger Interne geodätische Dual-Antenne | GNSS-Empfänger Interne Dual-Antenne | GNSS-Empfänger Interne Dual-Antenne | GNSS-Empfänger Interne Dual-Antenne |
| Gewicht (g) | Gewicht (g) 600 g | Gewicht (g) 65 g | Gewicht (g) 165 g | Gewicht (g) 38 g |
| Abmessungen (LxBxH) | Abmessungen (LxBxH) 100 x 86 x 75 mm | Abmessungen (LxBxH) 46 x 45 x 32 mm | Abmessungen (LxBxH) 42 x 57 x 60 mm | Abmessungen (LxBxH) 50 x 37 x 23 mm |



Ekinox-D Kompatibilität
Dokumentation & Ressourcen
Ekinox-D wird mit einer umfassenden Dokumentation geliefert, die Benutzer bei jedem Schritt unterstützt.
Von Installationsanleitungen bis hin zu erweiterten Konfigurations- und Fehlerbehebungsanleitungen gewährleisten unsere klaren und detaillierten Handbücher eine reibungslose Integration und einen reibungslosen Betrieb.
Unsere Fallstudien
Entdecken Sie Anwendungsfälle aus der Praxis, die zeigen, wie unsere INS die Leistung steigern, Ausfallzeiten reduzieren und die betriebliche Effizienz verbessern. Erfahren Sie, wie unsere fortschrittlichen Sensoren und intuitiven Schnittstellen die Präzision und Kontrolle bieten, die Sie benötigen, um in Ihren Anwendungen hervorragende Leistungen zu erzielen.





Zusätzliche Produkte und Zubehör
Entdecken Sie, wie unsere Lösungen Ihre Abläufe verändern können, indem Sie unsere vielfältigen Anwendungsbereiche erkunden. Mit unseren Bewegungs- und Navigationssensoren und unserer Software erhalten Sie Zugang zu modernsten Technologien, die Erfolg und Innovation in Ihrem Bereich vorantreiben.
Entdecken Sie mit uns das Potenzial von Inertialnavigations- und Positionierungslösungen in verschiedenen Branchen.
Qinertia GNSS-INS

Kabel

GNSS-Antennen
Unser Produktionsprozess
Entdecken Sie die Präzision und das Fachwissen, das hinter jedem SBG Systems Produkt steckt. Das folgende Video bietet einen Einblick in die sorgfältige Entwicklung, Herstellung und Prüfung unserer hochleistungsfähigen Inertialnavigationssysteme.
Von der fortschrittlichen Entwicklung bis zur strengen Qualitätskontrolle stellt unser Produktionsprozess sicher, dass jedes Produkt die höchsten Standards an Zuverlässigkeit und Genauigkeit erfüllt.
Sehen Sie sich jetzt das Video an, um mehr zu erfahren!

Ein Angebot anfordern
Sie reden über uns
Wir präsentieren die Erfahrungen und Testimonials von Branchenexperten und Kunden, die unsere Produkte in ihren Projekten eingesetzt haben. Entdecken Sie, wie unsere innovative Technologie ihre Abläufe verändert, die Produktivität gesteigert und zuverlässige Ergebnisse in verschiedenen Anwendungen geliefert hat.
FAQ-Bereich
Willkommen im FAQ-Bereich. Hier beantworten wir die wichtigsten Fragen zu unserer Spitzentechnologie und ihren Anwendungen. Hier finden Sie umfassende Antworten zu Produktmerkmalen, Installationsprozessen, Tipps zur Fehlerbehebung und Best Practices, um Ihre Erfahrungen zu maximieren.
Finden Sie hier Ihre Antworten!
Was ist Surge, Sway, Heave?
Surge, Sway und Heave sind die drei translatorischen Bewegungen, die beschreiben, wie sich ein Schiff oder eine Plattform im Ozean bewegt. Sie sind Teil der sechs Freiheitsgrade (DOF) der Bewegung, zu denen auch Stampfen, Rollen und Gieren (die Drehbewegungen) gehören.
- Surge ist die lineare Bewegung des Schiffes entlang seiner Längsachse (vorwärts und rückwärts). Wenn beispielsweise ein Schiff aufgrund von Wellen oder Antriebskräften schneller oder langsamer wird, erfährt es Surge.
- Sway ist die lineare Bewegung entlang der Querachse (von Seite zu Seite). Dies tritt auf, wenn ein Schiff aufgrund von Strömungen, Wind oder von der Seite kommenden Wellen seitwärts abdriftet.
- Heave ist die lineare Bewegung entlang der vertikalen Achse (auf und ab). Sie wird hauptsächlich durch Wellen verursacht, die das Schiff anheben und absenken.
Zusammen definieren Surge, Sway und Heave die translatorischen Verschiebungen des Schiffes im dreidimensionalen Raum. Diese Bewegungen sind in der Navigation, beim Offshore-Bohren, bei der dynamischen Positionierung und bei der Schiffsvermessung von entscheidender Bedeutung, da sie die Stabilität, Genauigkeit und Sicherheit direkt beeinflussen.
Was ist Bathymetrie?
Die Bathymetrie ist die Untersuchung und Messung der Tiefe und Form von Unterwassergelände, wobei der Schwerpunkt auf der Kartierung des Meeresbodens und anderer überfluteter Landschaften liegt. Sie ist das Unterwasseräquivalent der Topographie und liefert detaillierte Einblicke in die Unterwassermerkmale von Ozeanen, Meeren, Seen und Flüssen. Die Bathymetrie spielt eine entscheidende Rolle in verschiedenen Anwendungen, darunter Navigation, Meeresbau, Ressourcenerkundung und Umweltstudien.
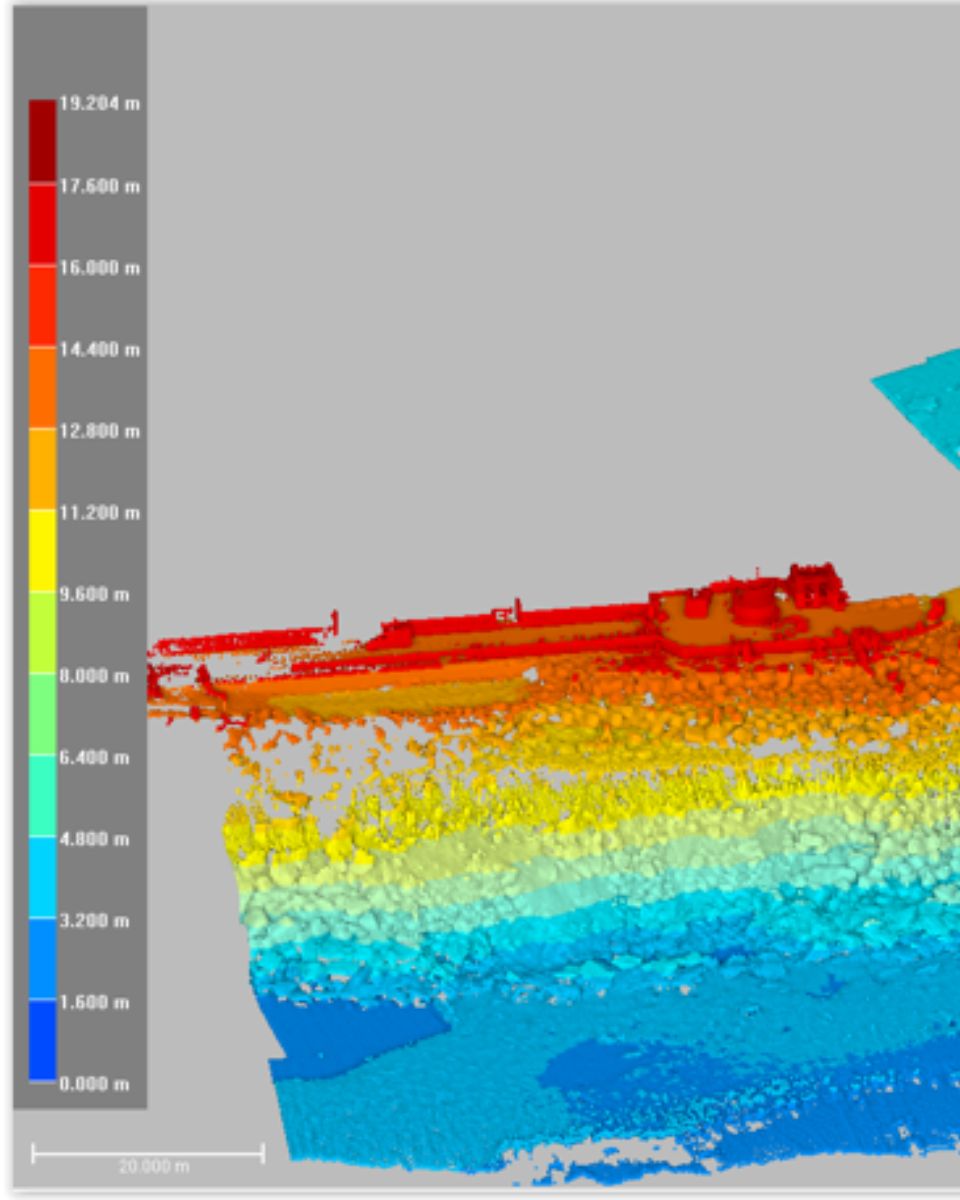
Moderne bathymetrische Verfahren basieren auf Sonarsystemen wie Ein- und Mehrstrahl-Echoloten, die Schallwellen zur Messung der Wassertiefe nutzen. Diese Geräte senden Schall-Pulse zum Meeresboden und erfassen die Zeit, die die Echos für die Rückkehr benötigen, wobei die Tiefe auf der Grundlage der Schallgeschwindigkeit im Wasser berechnet wird. Insbesondere Mehrstrahl-Echolote ermöglichen die gleichzeitige Kartierung breiter Bereiche des Meeresbodens und liefern so sehr detaillierte und genaue Darstellungen des Meeresbodens. Häufig wird eine RTK- + INS-Lösung verwendet, um genau positionierte 3D-bathymetrische Darstellungen des Meeresbodens zu erstellen.
Bathymetrische Daten sind für die Erstellung von Seekarten unerlässlich, die Schiffen helfen, sicher zu navigieren, indem sie potenzielle Unterwassergefahren wie versunkene Felsen, Wracks und Sandbänke identifizieren. Sie spielen auch eine wichtige Rolle in der wissenschaftlichen Forschung und helfen Forschern, geologische Unterwassermerkmale, Meeresströmungen und marine Ökosysteme zu verstehen.
Was ist hydrographische Vermessung?
Hydrographische Vermessung ist der Prozess der Messung und Kartierung physischer Merkmale von Gewässern, einschließlich Ozeanen, Flüssen, Seen und Küstengebieten. Sie umfasst das Sammeln von Daten über die Tiefe, Form und Konturen des Meeresbodens (Meeresbodenkartierung) sowie die Lage von Unterwasserobjekten, Navigationsgefahren und anderen Unterwassermerkmalen (z. B. Wassertiefen). Die hydrographische Vermessung ist von entscheidender Bedeutung für verschiedene Anwendungen, darunter Navigationssicherheit, Küstenmanagement und Küstenvermessung, Bauwesen und Umweltüberwachung.
Die hydrographische Vermessung umfasst mehrere Schlüsselkomponenten, beginnend mit der Bathymetrie, die die Wassertiefe und die Topographie des Meeresbodens mithilfe von Sonarsystemen wie Einzelstrahl- oder Multibeam-Echoloten misst, die Schallimpulse zum Meeresboden senden und die Rücklaufzeit des Echos messen.
Eine genaue Positionierung ist entscheidend und wird durch den Einsatz von Globalen Navigationssatellitensystemen (GNSS) und Inertialnavigationssystemen (INS) erreicht, um Tiefenmessungen mit präzisen geografischen Koordinaten zu verknüpfen. Zusätzlich werden Wassersäulendaten wie Temperatur, Salzgehalt und Strömungen gemessen und geophysikalische Daten erfasst, um Unterwasserobjekte, Hindernisse oder Gefahren mithilfe von Geräten wie Seitensichtsonaren und Magnetometern zu erkennen.
Was ist Multibeam-Echolotung?
Multibeam Echo Sounding (MBES) ist eine fortschrittliche hydrographische Vermessungstechnik, die zur hochpräzisen Kartierung des Meeresbodens und der Unterwasserstrukturen eingesetzt wird.
Im Gegensatz zu herkömmlichen Einzelstrahl-Echoloten, die die Tiefe an einem einzelnen Punkt direkt unter dem Schiff messen, verwendet MBES eine Reihe von Sonarstrahlen, um gleichzeitig Tiefenmessungen über eine breite Fläche des Meeresbodens zu erfassen. Dies ermöglicht eine detaillierte, hochauflösende Kartierung des Unterwassergeländes, einschließlich Topographie, geologischer Merkmale und potenzieller Gefahren.
MBES-Systeme senden Schallwellen aus, die sich durch das Wasser bewegen, vom Meeresboden abprallen und zum Schiff zurückkehren. Durch die Analyse der Zeit, die die Echos für die Rückkehr benötigen, berechnet das System die Tiefe an mehreren Punkten und erstellt so eine umfassende Karte der Unterwasserlandschaft.
Diese Technologie ist essenziell für verschiedene Anwendungen, einschließlich Navigation, Schiffsbau, Umweltüberwachung und Ressourcenerkundung, und liefert kritische Daten für sichere maritime Operationen und ein nachhaltiges Management der Meeresressourcen.
Was sind Wellenmesssensoren?
Wellensensoren sind wesentliche Werkzeuge, um die Meeresdynamik zu verstehen und die Sicherheit und Effizienz von Schiffsoperationen zu verbessern. Durch die Bereitstellung genauer und zeitnaher Daten über die Wellenbedingungen tragen sie dazu bei, Entscheidungen in verschiedenen Sektoren zu treffen, von der Schifffahrt und Navigation bis zum Umweltschutz. Wellenbojen sind schwimmende Geräte, die mit Sensoren zur Messung von Wellenparametern wie Höhe, Periode und Richtung ausgestattet sind.
Sie verwenden typischerweise Beschleunigungsmesser oder Gyroskope, um Wellenbewegungen zu erkennen (z. B. Wellenperiode) und können Echtzeitdaten zur Analyse an landgestützte Einrichtungen übertragen.
