Verbesserung der Navigation autonomer Fahrzeuge
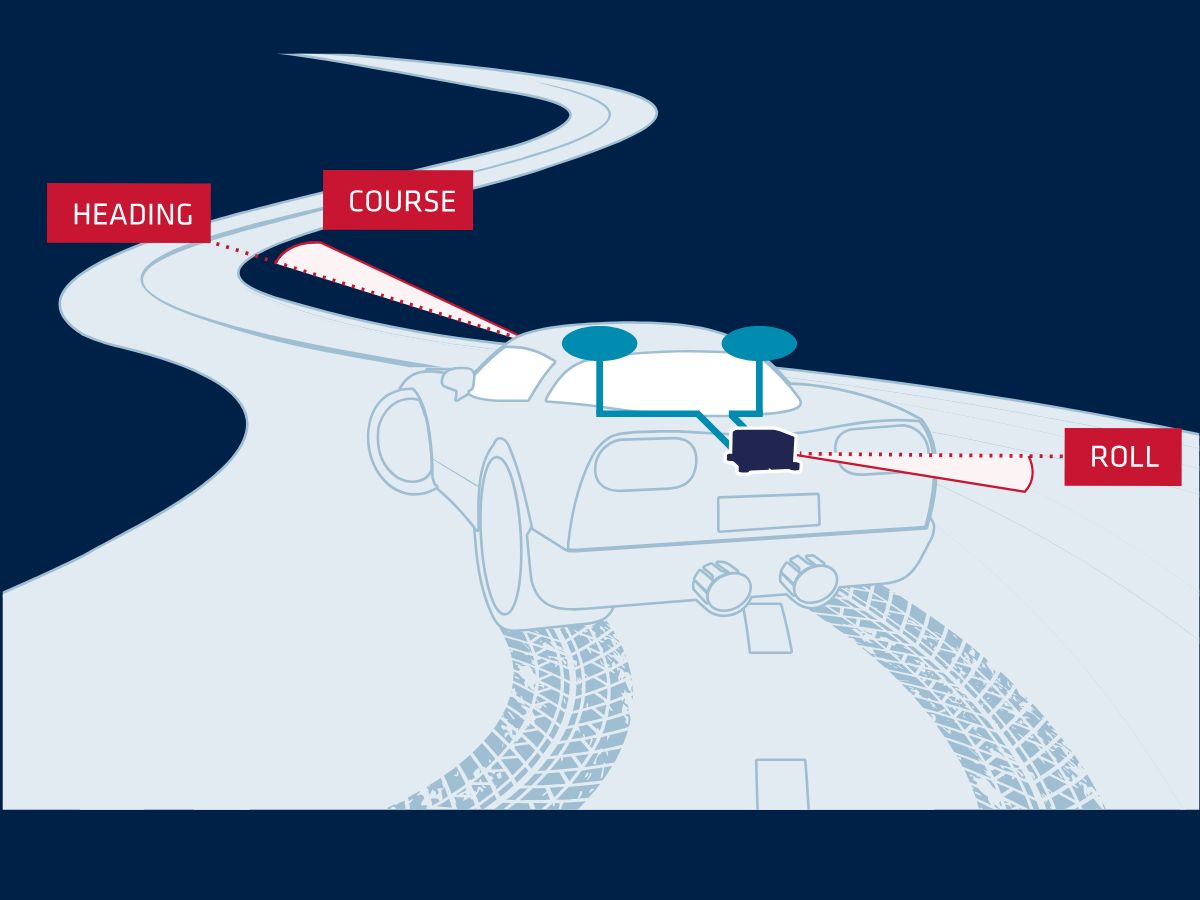
Unsere TrägheitsnavigationssystemeINS) bieten rollen, nicken und richtung, integriert mit einem GNSS-Empfänger, um die Genauigkeit bei Signalausfällen (Gebäude, Bäume, Tunnel usw.) aufrechtzuerhalten.
Trägheitssensoren werden auch zur präzisen Synchronisierung und Stabilisierung zusätzlicher Geräte wie LiDAR oder Kamera für eine fahrerlose Autoanwendung verwendet. Die Integration eines INS mit anderen Sensoren trägt zu einem umfassenden Verständnis der Fahrzeugumgebung bei, so dass das Fahrzeug in komplexen und dynamischen Szenarien mit größerer Präzision navigieren kann.

Verbesserung der Sicherheit und Zuverlässigkeit von selbstfahrenden Fahrzeugen
Eine der größten Herausforderungen für selbstfahrende Autos sind städtische Gebiete, in denen GNSS-Signale durch hohe Gebäude behindert werden können und sich die Verkehrsbedingungen schnell ändern können. INS bietet die Genauigkeit und Zuverlässigkeit, die für eine sichere Navigation in diesen Umgebungen erforderlich sind.
Unsere INS verwenden MEMS-Technologie (Micro-Electro-Mechanical Systems). Dies ermöglicht kleinere, genauere und energieeffizientere Sensoren, die die Gesamtleistung von INS in autonomen Fahrzeugen verbessern.
Trägheitsnavigationssysteme für selbstfahrende Autos
Unsere Trägheitsnavigationssysteme sind so konzipiert, dass sie die unübertroffene Genauigkeit und Zuverlässigkeit bieten, die erforderlich ist, um komplexe Umgebungen wie Stadtschluchten sicher zu navigieren.
Wir haben fortschrittliche INS entwickelt, die sich nahtlos in Ihre autonomen Fahrzeugsysteme integrieren lassen und Echtzeitdaten liefern, die eine präzise Positionierung und reibungslose, genaue Steuerung gewährleisten. Von städtischen Straßen bis hin zu schwierigem Gelände - wir statten Ihre selbstfahrende Fahrzeugtechnologie mit den robusten, leistungsstarken Navigationsfunktionen aus, die für einen sicheren, zuverlässigen und effizienten autonomen Betrieb erforderlich sind.

Unsere Lösungen für selbstfahrende Autos
Fahren Sie mit uns in die Zukunft der autonomen Mobilität, wo Innovation auf Präzision trifft und jede Fahrt mit unvergleichlicher Genauigkeit geführt wird. Entdecken Sie unsere Lösungen für die Navigation selbstfahrender Autos.

Ellipse-D

Ekinox Micro

Ekinox-D
Broschüre über autonome Anwendungen
Erhalten Sie unsere Broschüre direkt in Ihren Posteingang!
Fallstudien
In unseren Fallstudien erfahren Sie, wie unsere Inertialtechnologie die Landschaft der selbstfahrenden Fahrzeuge umgestaltet. Diese Beispiele aus der Praxis zeigen, wie unsere fortschrittlichen Sensoren eine präzise Navigation und robuste Leistung selbst unter den anspruchsvollsten Bedingungen ermöglichen.
Ob zur Verbesserung der Sicherheit in komplexen städtischen Umgebungen oder zur Gewährleistung optimaler Funktionalität bei fehlenden GNSS-Signalen - unsere Lösungen ermöglichen selbstfahrenden Autos eine überlegene Genauigkeit und Kontrolle.



Sie sprechen über uns
Hören Sie aus erster Hand von den Innovatoren und Kunden, die unsere Technologie eingesetzt haben.
Ihre Erfahrungsberichte und Erfolgsgeschichten veranschaulichen den bedeutenden Einfluss, den unsere Sensoren in praktischen Anwendungen für autonome Fahrzeuge haben.
Erkundung weiterer potenzieller Anwendungen für autonome Fahrzeuge
Autonome Fahrzeuge verändern Branchen weit über das Transportwesen hinaus. Von der Landwirtschaft über die Logistik bis hin zum Bauwesen und der Überwachung ermöglichen fortschrittliche Navigationstechnologien intelligentere, sicherere und effizientere Abläufe. Entdecken Sie die breite Palette innovativer Anwendungen, die durch Autonomie ermöglicht werden.
Haben Sie noch Fragen?
Hier finden Sie Antworten auf die häufigsten Fragen zu den von uns vorgestellten Anwendungen. Wenn Sie nicht finden, wonach Sie suchen, können Sie sich direkt an uns wenden!
Wie funktionieren selbstfahrende Autos?
Selbstfahrende Autos sind Fahrzeuge, die mit hochentwickelten Systemen ausgestattet sind, die es ihnen ermöglichen, ohne menschliches Eingreifen zu navigieren und sich selbst zu steuern. Diese Fahrzeuge nutzen eine Kombination aus Sensoren und Algorithmen für das autonome Fahren, um ihre Umgebung wahrzunehmen, Entscheidungen zu treffen und selbstfahrende Aufgaben auszuführen. Ziel ist es, eine vollständige Autonomie zu erreichen, bei der das Fahrzeug alle Aspekte des Fahrens sicher und effizient erledigen kann.
Selbstfahrende Autos sind auf eine Reihe von Schlüsseltechnologien angewiesen, um ihre Umgebung wahrzunehmen. Dazu gehören:
- GNSS (Global Navigation Satellite System): um Echtzeit-Updates über die Position, Geschwindigkeit und Richtung des selbstfahrenden Autos zu erhalten.
- INS (Inertial Navigation Systems): zur Aufrechterhaltung der Genauigkeit bei Ausfällen des GNSS-Signals. Es liefert Echtzeit-Updates für die Position, Geschwindigkeit und Richtung des selbstfahrenden Autos.
- LiDAR (Light Detection and Ranging): Verwendung von Laserstrahlen zur Erstellung einer detaillierten 3D-Karte der Fahrzeugumgebung. Diese Technologie hilft dem Auto, Objekte in seiner Umgebung zu erkennen und zu messen, einschließlich anderer Fahrzeuge, Fußgänger und Straßenschilder.
- Radar (Radio Detection and Ranging): Nutzung von Radiowellen, um die Geschwindigkeit, Entfernung und Richtung von Objekten zu ermitteln. Radar ist besonders nützlich bei ungünstigen Wetterverhältnissen und zur Erkennung von Objekten in größerer Entfernung.
- Kameras: zur Erfassung visueller Informationen über die Fahrzeugumgebung, einschließlich Fahrbahnmarkierungen, Verkehrszeichen und Straßenschildern. Sie sind wichtig, um komplexe visuelle Hinweise zu interpretieren und Entscheidungen auf der Grundlage visueller Daten zu treffen.
Was ist der Unterschied zwischen ADAS in Autos und selbstfahrenden Autos?
ADAS (Advanced Driver Assistance Systems) erhöhen die Fahrsicherheit durch Funktionen wie Spurhaltung, adaptive Geschwindigkeitsregelung und automatisches Bremsen, erfordern aber eine aktive Überwachung durch den Fahrer. Im Gegensatz dazu zielen selbstfahrende Autos, die mit autonomen Fahrsystemen ausgestattet sind, darauf ab, den Fahrzeugbetrieb ohne menschliches Eingreifen vollständig zu automatisieren.
Während ADAS den Fahrer bei seinen Aufgaben unterstützt und die Sicherheit erhöht, sind selbstfahrende Autos so konzipiert, dass sie alle Aspekte des autonomen Fahrens, von der Navigation bis zur Entscheidungsfindung, übernehmen und einen höheren Grad an Automatisierung (SAE-Stufen) und Komfort bieten. ADAS-Merkmale oder -Funktionen werden den SAE-Stufen unter 3 zugeordnet, selbstfahrende Autos als solche entsprechen mindestens der Stufe 4.