在低动态环境下表现出更高的性能
集成了 IMU 的移动测绘系统提供实时数据,从而能够深入了解环境动态。
这些系统支持为自动驾驶车辆创建高清地图(HD 地图),提高精度并降低数据缺失的风险,使其成为基础设施测绘、道路勘测和环境分析等应用必不可少的工具。
凭借先进的 GNSS 和惯性集成技术,移动测绘系统可实现快速设置和初始化,从而最大限度地减少停机时间并实现快速数据采集。这在时间紧迫的情况下尤其有价值,例如基础设施移动测量或应急响应测绘,在这些情况下,快速部署至关重要。
在低动态环境中,例如车辆在城市区域或室内缓慢移动时,高性能惯性系统可保持精确定位和姿态数据。虽然传统的 GPS 系统可能在这种情况下难以正常工作,但与 GNSS 集成的 INS 可确保连续可靠的数据,即使在 GNSS 受限的环境中也是如此。
这些系统可确保在任何环境中提供一致的性能并提供准确的 3D 模型、地形图和地理空间产品。无论移动速度或环境复杂程度如何,它们都能保持精度。

具有内置同步的单一通信接口
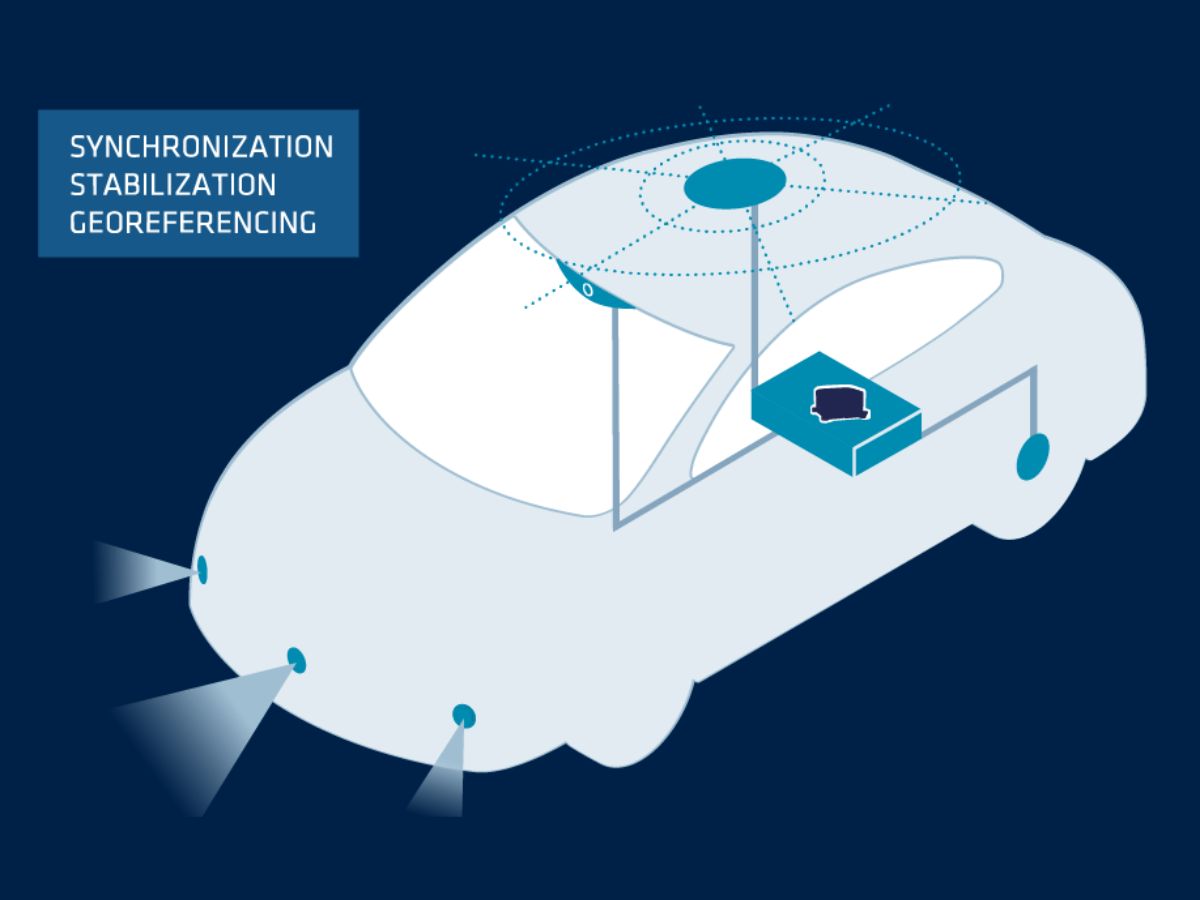
我们的惯性系统支持简化的集成过程,具有单一的通信接口。INS 可以作为来自 GNSS 和 LiDAR 传感器的数据的中央枢纽。通过使用行业标准通信协议、以太网或 CAN 总线,您可以将 INS 与您的 GNSS 接收器和移动 LiDAR 系统连接,从而最大限度地降低硬件复杂性,并避免需要多个通信链路。
我们的 INS 解决方案具有内置的同步功能,可确保 GNSS、LiDAR 和惯性数据之间的无缝数据融合。
INS 可以用作 PTP 主时钟,同步来自所有传感器的时间戳,这对于 SLAM 操作至关重要。它使用实时时钟 (RTC) 功能以及处理 GNSS 定时和外部触发信号的能力。INS 将确保 GNSS 和 LiDAR 数据正确对齐,以进行准确的 SLAM 处理。
实时和后处理能力
移动测量系统 (MMS) 提供实时和后处理功能,允许用户访问即时数据的同时,还可以稍后优化结果以提高精度。
实时数据采集允许工程师或测量员进行现场评估,而后处理软件可确保最终输出尽可能准确。即使在卫星信号不可用或降级时,惯性系统通过保持一致且可靠的位置数据,为这一过程做出了重大贡献。
配备惯性系统的移动测量平台在数据收集和分析方面具有灵活性。操作员可以动态调整参数,确保其测绘项目满足所需的精度标准。
我们提供 Qinertia,这是一款强大的后处理软件,可优化 GNSS 和 INS 数据,从而提高轨迹精度。Qinertia 通过增强精度和可靠性来补充基于 SLAM 的测绘工作流程。

了解我们的移动测绘解决方案
我们的惯性导航系统 (INS) 专为测量市场设计,提供高性能和易用性。它们基于先进的惯性传感器构建,集成了尖端算法和 GNSS 技术,可提供精确的导航和定位数据。我们的系统具有高度的适应性,具有可配置的组件,可满足特定的应用需求

Ekinox-D

Apogee-D

Navsight Land-Air
测绘应用手册
将我们的产品手册直接发送到您的收件箱!






他们在谈论我们
直接听取已采用我们技术的创新者和客户的意见。
他们的客户评价和成功案例说明了我们的传感器在实际的自动驾驶车辆应用中产生的重大影响。
了解更多测量应用
SBG Systems 为陆地、海洋和航空测量提供高性能惯性导航系统和运动传感器。我们的惯性解决方案使地理空间专业人员能够在任何环境中收集精确的位置、方向和运动数据。
了解我们的测量应用。
您有疑问吗?
我们的常见问题解答部分回答了关于移动测绘系统及其背后技术的常见问题。它还解释了最佳实践,并展示了如何将我们的产品集成到您的解决方案中。
SLAM 是什么意思?
SLAM,代表 Simultaneous Localization and Mapping(同步定位与地图构建),是一种用于机器人技术和计算机视觉的计算技术,用于构建未知环境的地图,同时跟踪代理在该环境中的位置。这在 GNSS 不可用的情况下特别有用,例如在室内或在密集的城市区域。
SLAM 系统实时确定载体的位置和姿态。这涉及跟踪机器人或设备在环境中导航时的运动。在载体移动时,SLAM 系统会创建环境地图。这可以是 2D 或 3D 表示,捕捉周围环境的布局、障碍物和特征。
这些系统通常利用多个传感器,例如摄像头、LiDAR 或惯性测量单元 (IMU),来收集有关环境的数据。此数据组合在一起可提高定位和绘图的准确性。
SLAM 算法处理传入的数据,以持续更新地图和代理的位置。这涉及到复杂的数学计算,包括滤波和优化技术。
什么是实时动态定位技术?
实时动态定位(RTK)是一种精确的卫星导航技术,用于提高从全球导航卫星系统(GNSS)测量中获得的位置数据的精度。它广泛应用于测量、农业和自动驾驶车辆导航等应用。
通过使用一个接收 GNSS 信号并以高精度计算其位置的基站。然后,它将修正数据实时传输到一个或多个移动接收器(流动站)。流动站使用这些数据来调整其 GNSS 读数,从而提高其定位精度。
RTK 通过实时校正 GNSS 信号提供厘米级的精度。这比标准 GNSS 定位精确得多,标准 GNSS 定位通常在几米范围内提供精度。
来自基站的校正数据通过各种通信方式(如无线电、蜂窝网络或互联网)发送到移动站。这种实时通信对于在动态操作期间保持精度至关重要。
什么是精确单点定位 (Precise Point Positioning)?
精确单点定位 (PPP) 是一种卫星导航技术,通过校正卫星信号误差来提供高精度定位。与通常依赖地面参考站的传统 GNSS 方法(如 RTK)不同,PPP 利用全球卫星数据和先进算法来提供准确的位置信息。
PPP 在世界任何地方都可以工作,无需本地参考站。这使其适用于缺乏地面基础设施的偏远或具有挑战性的环境中的应用。通过使用精确的卫星轨道和时钟数据,以及对大气和多径效应的校正,PPP 可以最大限度地减少常见的 GNSS 误差,并可以实现厘米级的精度。
PPP 虽然可用于后处理定位(即事后分析收集到的数据),但它也可以提供实时定位解决方案。实时 PPP (RTPPP) 越来越普及,允许用户接收校正并实时确定其位置。
什么是实时时钟?
实时时钟 (RTC) 是一种用于跟踪当前时间和日期的电子设备,即使在断电时也是如此。RTC 广泛应用于需要精确计时的应用中,具有以下几个关键功能。
首先,它们能精确地计算秒、分、时、天、月和年,通常会结合闰年和星期几的计算,以实现长期精度。RTC 功耗低,并且可以在电池备用电源下运行,使它们能够在断电期间继续计时。它们还为数据条目和日志提供时间戳,确保文档记录的准确性。
此外,RTC 还可以触发计划操作,从而允许系统从低功耗状态唤醒或在指定时间执行任务。它们在同步多个设备(例如 GNSS/INS)方面发挥着关键作用,确保它们协同运行。
RTC是各种设备中不可或缺的组成部分,从计算机和工业设备到物联网设备,增强了功能并确保了跨多个应用程序的可靠时间管理。
GPS 如何工作?
GPS(全球定位系统)通过使用卫星星座、精确授时和三边测量法来确定您在地球上的任何位置。
以下是最简单的清晰解释:
1 – 卫星广播信号
大约 30 颗 GPS 卫星绕地球运行,每颗卫星持续传输:
– 其在太空中的确切位置
– 发送信号的确切时间(使用原子钟)
这些信号以光速传播。
2 – 您的接收器测量传播时间
GPS 接收器(在您的手机、无人机、INS 等中)接收来自多个卫星的信号。
通过测量每个信号到达所需的时间,它可以计算出距离:
距离 = 光速 × 传播时间
3 – 三角定位计算您的位置
为了找到您的位置,接收器使用三边测量(而不是三角测量):
- 使用 1 颗卫星 → 您可能位于球体上的任何位置
- 使用 2 颗卫星 → 圆圈相交
- 使用 3 颗卫星 → 两个可能的点
- 使用 4 颗卫星 → 您的精确 3D 位置 + 时钟校正
您的接收器没有原子钟,因此需要第 4 颗卫星来解决计时误差。
4 – 修正提高精度
原始 GPS 存在以下误差:
- 大气(电离层,对流层)
- 卫星时钟漂移
- 轨道预测误差
- 多径反射(信号从建筑物反射)
为了提高精度:
- SBAS(例如,WAAS、EGNOS)提供实时校正
- RTK 和 PPP 技术可将误差校正到厘米级
- INS 耦合(IMU + GPS)可平滑和弥合信号丢失期间的间隙
6 – 最终输出
接收器组合所有数据以估计:
- 纬度
- 经度
- 海拔
- 速度
- 精确时间
现代 GPS 接收器每秒执行数十次或数百次此操作。
什么是惯性导航?
惯性导航是一种仅使用内部传感器来确定车辆位置、姿态和运动的方法,不依赖于GPS等外部信号。其核心在于,惯性导航系统 (INS) 通过连续跟踪物体在三维空间中的加速度和旋转来测量其运动方式。它使用惯性测量单元 (IMU),其中包含用于感测线性加速度的加速度计和用于测量角速率的陀螺仪。通过对这些测量值进行时间积分,系统可以计算出相对于已知起点的速度、姿态,并最终确定位置。
由于其完全独立性,惯性导航系统可在任何环境——地下、水下、太空或 GNSS 拒止条件下——运行,使其成为导弹、飞机、潜艇、自动驾驶车辆和机器人等应用不可或缺的一部分。现代 INS 解决方案通常将惯性传感器与 GNSS 接收机、磁力计、气压计或 多普勒计程仪 等额外辅助源结合,以减少漂移并提高长期精度。高性能 INS 依赖于精确的传感器校准、先进的滤波算法和强大的误差建模,即使在最严苛的环境中也能提供稳定、可靠的导航数据。
