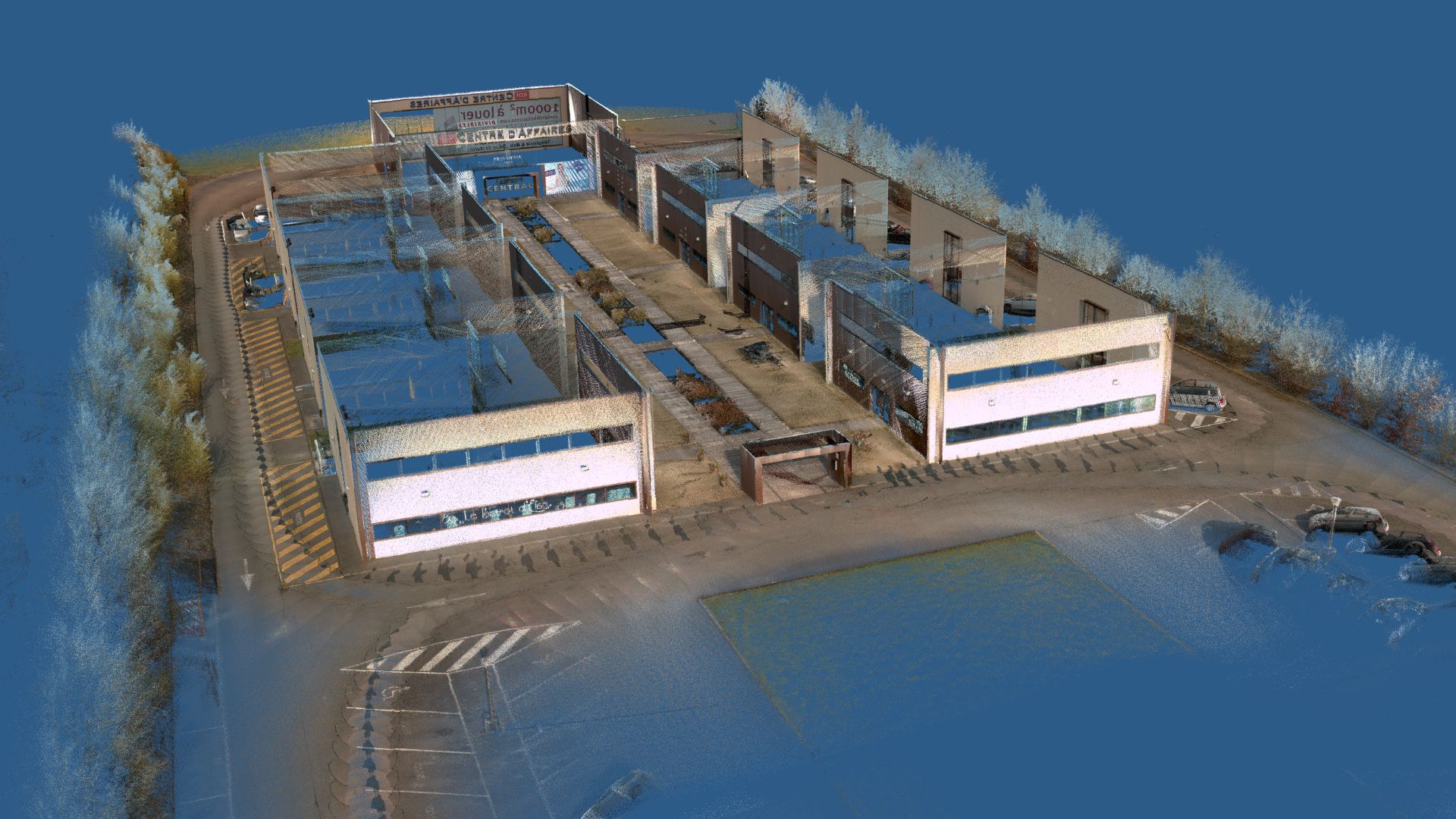
基于 SLAM 的移动测绘
vMS3D 是一种移动测绘系统,结合了惯性、GNSS 和 SLAM 技术的精华。
“Ellipse INS 提供了非常非常精确的速度数据。” | VIAMETRIS 创始人 Ninot 先生

VIAMETRIS 是基于 SLAM 的解决方案开发的先驱。两年前,该公司发布了 iMS3D,这是一种基于 SLAM 技术的室内测绘系统。
凭借这一经验,该公司刚刚推出了一种新的解决方案:vMS3D,这是一种移动测绘系统,它结合了最佳的惯性、GNSS 和 SLAM 技术,以提供具有吸引力的性能/价格比的创新解决方案。
最智能的移动测绘系统
vMS3D 看起来像一个经典的移动测绘系统 (MMS)。它集成了 360° 摄像头、旋转 LiDAR、带有 GNSS 接收器的内部导航系统。
简单直接的自动工作流程并没有显示出使其独一无二的微妙而复杂的内部计算。事实上,vMS3D 配备了一个额外的 LiDAR,用于 SLAM 计算。
采集完成后,后处理软件 - 名为 PPiMMS - 会自动分析 GNSS 足够、惯性优先或需要 SLAM 的情况。
GNSS、惯性和 SLAM 的最佳组合
vMS3D 解决方案考虑了每种技术的优点和缺点,具体取决于它们的使用条件:
- GNSS:当 GNSS 接收器提供可靠数据时(例如在开阔天空环境中),解决方案依赖于其位置。如果发生 GNSS 信号中断或干扰,系统会在惯性数据或基于 SLAM 的数据之间进行选择。
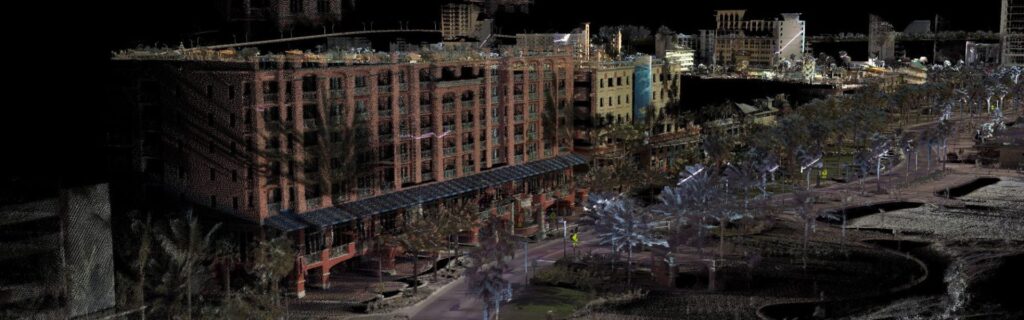
- SLAM:在周围物体非常密集且各异、距离又很近的环境中,例如在城市峡谷或森林中,首选通过 SLAM 计算得到的位置。在物体距离太远或无法区分的环境中,SLAM 的性能会受到限制。
- 惯性:惯性导航系统 (INS) 提供的速度和方向信息能够在 GNSS 和 SLAM 受到限制的所有情况下辅助导航。惯性导航系统提供横摇和纵倾信息来约束所有 LiDAR 数据,因此点云在地面上被引用。转弯速率也很有帮助,尤其是在发生突然的方向变化时。实际上,当 LiDAR 运动时,需要在两次扫描之间进行方向补偿。
Ellipse-D,VIAMETRIS 的明智之选
对椭圆形已非常满意 Ellipse 室内iMS3D系统时已非常满意,VIAMETRIS创始人Jérôme NinotINS 创新项目选择INS 并未另寻他家。
"Ellipse INS 极其精确的速度数据",尼诺先生如是说。
创新性的SLAM计算技术使VIAMETRIS得以采用小型化且经济高效的惯性传感器,而市面上其他系统则需要更高精度的惯性系统。Ellipse 可实现0.1°的姿态精度。
Ninot 先生还选择了 Ellipse-D 型号,因为它具有一体式和微型外形,以及嵌入式 RTK GNSS 接收器。
“借助像 Ellipse-D 这样集成的 INS,它提供了一个单一的通信接口和与 GNSS 和 LiDAR 的内置同步,我们能够专注于我们的 SLAM 专业知识” CEO 补充道,然后提到更少的电缆总是一个不错的选择。
Ellipse-D,众多任务的合作伙伴
Ellipse-D 集成到这种创新解决方案中,可执行多项任务。首先,它提供横摇和纵倾信息来约束所有 LiDAR 数据,从而使点云以地面为参考。
其次,Ellipse-D 的转弯速率非常有用,尤其是在发生突然的方向变化时。实际上,当 LiDAR 处于运动状态时,需要在两次扫描之间进行方向补偿。
最后,Ellipse-D 实时融合惯性和 GNSS 信息,以提供出色的速度测量,这对于持续辅助 vMS3D 内部算法也非常重要。

Ellipse-D
Ellipse-D 是一款惯性导航系统,集成了双天线和双频 RTK GNSS,与我们的后处理软件 Qinertia 兼容。
专为机器人和地理空间应用而设计,它可以将里程计输入与 Pulse 或 CAN OBDII 融合,以提高航位推算精度。

请求 Ellipse-D 的报价
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
如何将惯性系统与激光雷达结合用于无人机测绘?
将 SBG Systems 的惯性系统与 LiDAR 结合用于无人机测绘,可提高捕获精确地理空间数据的准确性和可靠性。
以下是集成的工作原理以及它如何使基于无人机的测绘受益:
- 一种遥感方法,使用激光脉冲测量到地球表面的距离,从而创建地形或结构的详细 3D 地图。
- SBG Systems INS 将惯性测量单元 (IMU) 与 GNSS 数据相结合,即使在 GNSS 受限的环境中也能提供精确定位、姿态(俯仰、横滚、偏航)和速度。
SBG 的惯性系统与 LiDAR 数据同步。INS 精确跟踪无人机的位置和方向,而 LiDAR 捕获下方地形或物体的细节。
通过了解无人机的精确方向,LiDAR数据可以准确定位在3D空间中。
GNSS 组件提供全局定位,而 IMU 提供实时姿态和运动数据。这种组合确保即使在 GNSS 信号较弱或不可用时(例如,在高层建筑物或茂密的森林附近),INS 也可以继续跟踪无人机的路径和位置,从而实现一致的 LiDAR 测绘。
什么是多波束回声测深?
RTK 和 PPK 之间有什么区别?
实时动态 (RTK) 是一种定位技术,其中 GNSS 校正以近乎实时的方式传输,通常使用 RTCM 格式的校正流。但是,在确保 GNSS 校正(特别是其完整性、可用性、覆盖范围和兼容性)方面可能存在挑战。
与 RTK 后处理相比,PPK 的主要优势在于可以在后处理期间优化数据处理活动,包括正向和反向处理,而在实时处理中,校正及其传输中的任何中断或不兼容都会导致较低的定位精度。
GNSS 后处理 (PPK) 与实时 (RTK) 相比,第一个关键优势是现场使用的系统不需要数据链/无线电来将来自 CORS 的 RTCM 校正馈送到 INS/GNSS 系统 中。
后处理应用的主要限制是最终应用程序需要对环境做出反应。另一方面,如果您的应用程序可以承受生成优化轨迹所需的额外处理时间,它将大大提高所有交付的数据质量。
