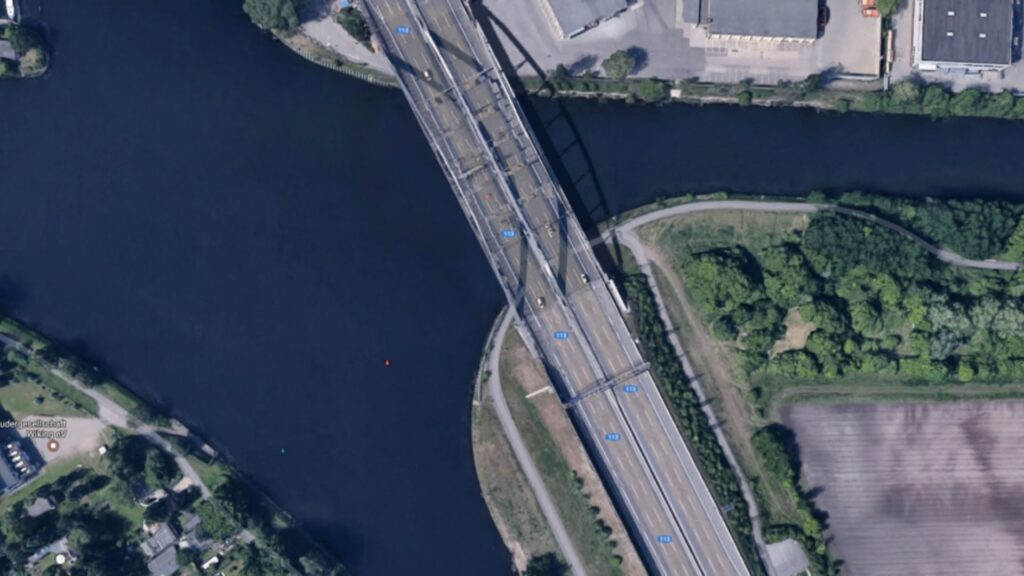
桥梁下测绘
包括 Apogee-E 在内的最先进的水文设备。
“Apogee-E 中的 DVL 输入是一个很大的优势。它有助于实时 GNSS 中断,尤其是在桥下。” | Alexander S., MacArtney 公司 MBT 技术销售经理

WSA Berlin 的先进设备
WSA Berlin 公司的 «Spreegrund» 号船只由 MacArtney Germany 公司配备了最先进的设备,包括 SBG 的最高精度惯性导航系统 Apogee-E。
这艘名为 «Spreegrund» 的测量船在德国的湖泊、邻近的运河和河流(柏林、勃兰登堡、埃伯斯瓦尔德和劳恩堡)上用作测量船。它以高达 6 节的速度和低至 20 米的水深进行完整的测量。
先进的海道测量设备
船载设备包括:
– 首个 Teledyne RESON T20-P TripleHead 多波束回声测深仪
– Teledyne ODOM CV 100 单波束回声测深仪,
– Teledyne RDI Navigator DVL
– Valeport SWiFT 以及 Valeport Ultra SV 声速传感器
– 数据采集软件 QINSy
– 以及由 MacArtney Germany 提供的 SBG Apogee-E 惯性导航系统,以及两个 ObeLx-R GNSS 航向接收器(内部为 Septentrio 板)。船载控制系统和软件协同工作,以确保从测量传感器套件获得最佳数据采集。它能够处理高达每秒 25,000 次探测的巨大数据流。
使用 Apogee INS 在桥下进行海图绘制
在桥下进行测量是一项具有挑战性的应用,它完全需要惯性和 GNSS 数据的融合。 事实上,当船只穿过桥梁时,GNSS 接收器会受到干扰,并可能导致信号中断或数据不正确。
对于 WSA Berlin 而言,这是一个日常挑战,这也解释了为什么 MacArtney 选择将 Apogee-E 惯性导航系统与其自己的双天线 GNSS 接收器(内部为 Septentrio)连接。
“我们需要最高的 INS 精度来保持整个设备非常高的精度,”MacArtney Germany 的 Alexander Schmidt 说。
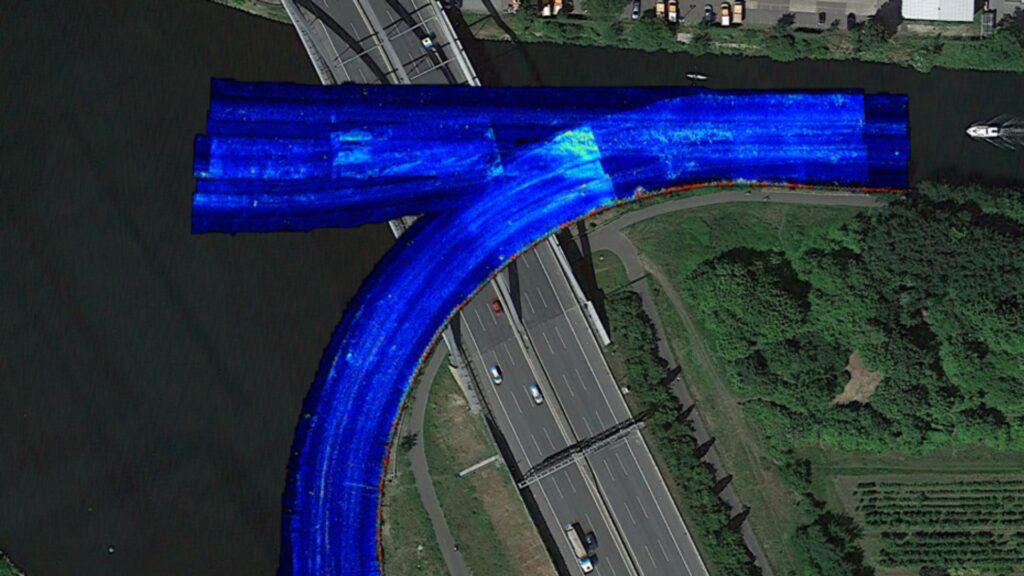
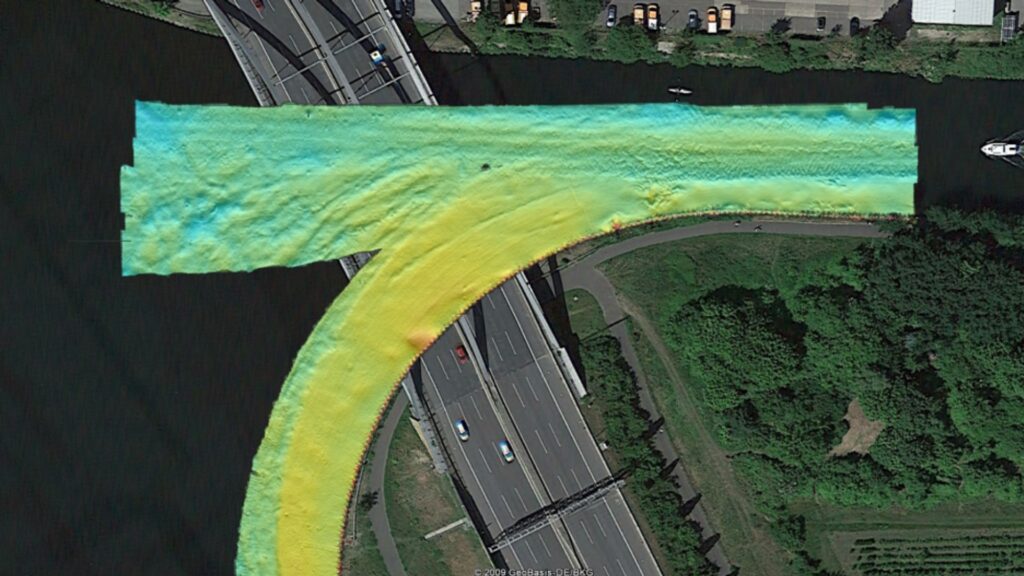
使用 Apogee INS 在桥下进行测绘
“我们使用 Apogee-E 获得了出色的结果,图像本身就说明了问题。” | 来自 McArtney, Germany 的 Alexander S.

Apogee-E
Apogee-E 连接到任何测量级 GNSS 接收器,用于导航和辅助设备,例如里程表或 DVL。
这种高度通用的惯性导航系统可实时和后处理提供姿态、导航和升沉数据。

索取 Apogee-E 的报价
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
什么是波浪测量传感器?
什么是水深测量?
测深是对水下地形的深度和形状进行研究和测量的学科,主要侧重于绘制海底和其他水下地貌。它是水下地形的等效物,提供了对海洋、湖泊和河流的水下特征的详细了解。测深在各种应用中起着至关重要的作用,包括导航、海洋建设、资源勘探和环境研究。
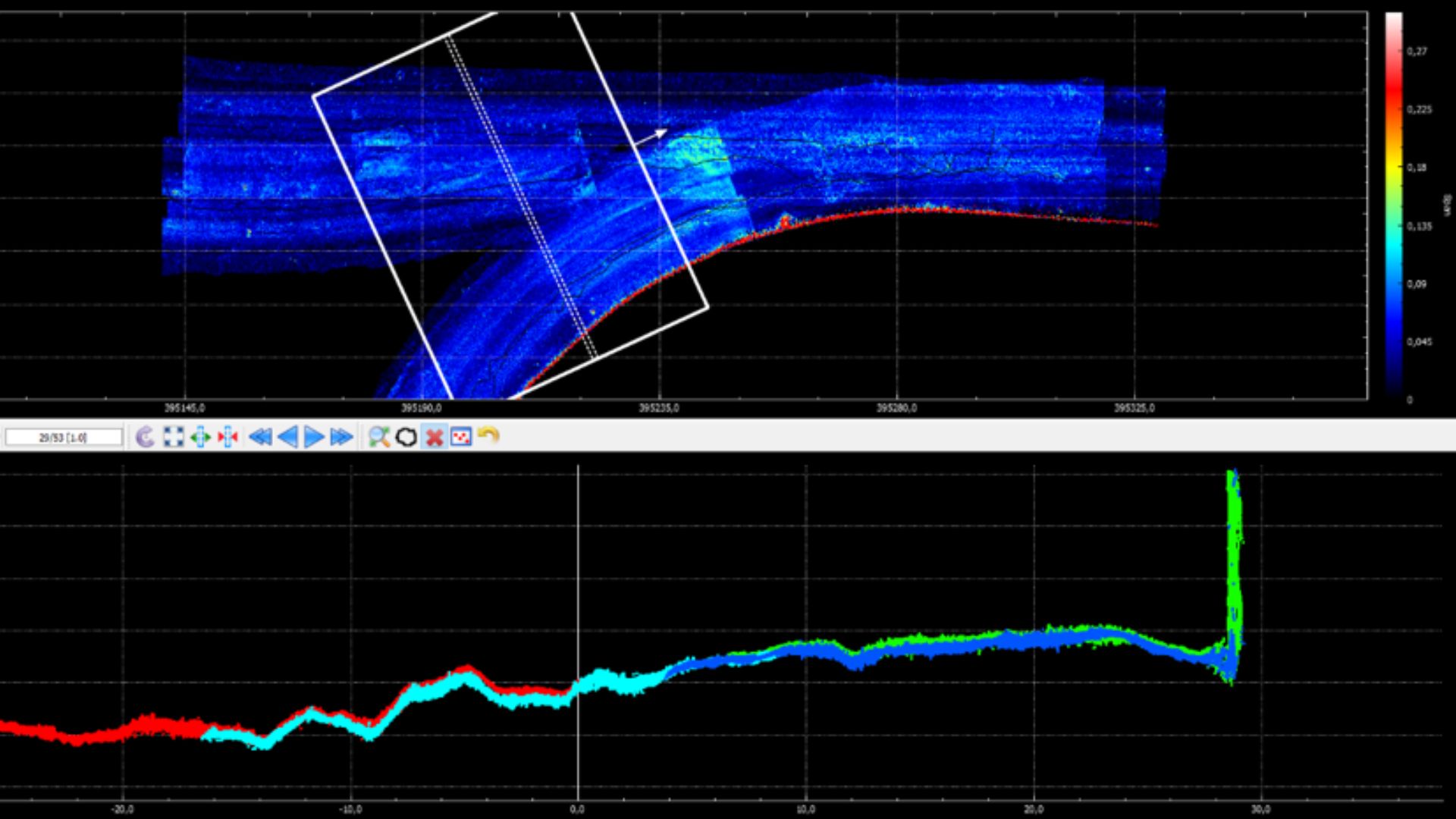
现代测深技术依赖于声纳系统,例如单波束和多波束回声测深仪,它们使用声波来测量水深。这些设备向海底发送声波脉冲,并记录回声返回所需的时间,根据水中声速计算深度。特别是多波束回声测深仪,可以一次绘制大片海底地图,从而提供高度详细和准确的海底表示。通常,RTK + INS 解决方案与创建精确定位的海底 3D 测深表示相关联。
水深数据对于创建航海图至关重要,它通过识别潜在的水下危险(如水下岩石、沉船和沙洲)来帮助安全引导船只。它还在科学研究中发挥着至关重要的作用,帮助研究人员了解水下地质特征、洋流和海洋生态系统。
什么是水文测量?
水文测量是测量和绘制水体(包括海洋、河流、湖泊和沿海地区)物理特征的过程。它涉及收集与海底的深度、形状和轮廓(海底测绘)以及水下物体、导航危险和其他水下特征(例如水槽)的位置相关的数据。水文测量对于各种应用至关重要,包括导航安全、海岸管理和沿海测量、建筑和环境监测。
水文测量 涉及几个关键组成部分,首先是测深,它使用声纳系统(如单波束或多波束回声测深仪)测量水深和海底地形,这些系统向海底发送声脉冲并测量回声的返回时间。
精确定位至关重要,它通过使用全球导航卫星系统 (GNSS) 和惯性导航系统 (INS) 将深度测量链接到精确的地理坐标来实现。此外,还会测量水柱数据(如温度、盐度和水流),并收集地球物理数据,以使用侧扫声纳和磁力计等工具检测水下物体、障碍物或危险。
