
在本期“掌握精度”系列的第一篇文章中,我们将探讨全球导航卫星系统 (GNSS) 及其独立精度,同时考虑 GNSS 及其误差源
什么是 GNSS 系统?
像 GPS 这样的基于卫星的定位系统已经变得无处不在,引导我们完成汽车旅程和徒步旅行。 它们还在自动驾驶汽车、农业和测量等各种应用中发挥着关键作用。
然而,重要的是从“GPS”这一术语转向更具包容性的“GNSS”(全球导航卫星系统),后者涵盖了除GPS之外的所有卫星星座。
目前有四个全球卫星导航系统在运行(GPS、GLONASS、GALILEO、BEIDOU)。 此外,还有服务于当地区域的补充星座,如印度的IRNSS,或对全球星座进行补充的系统,如日本的QZSS。
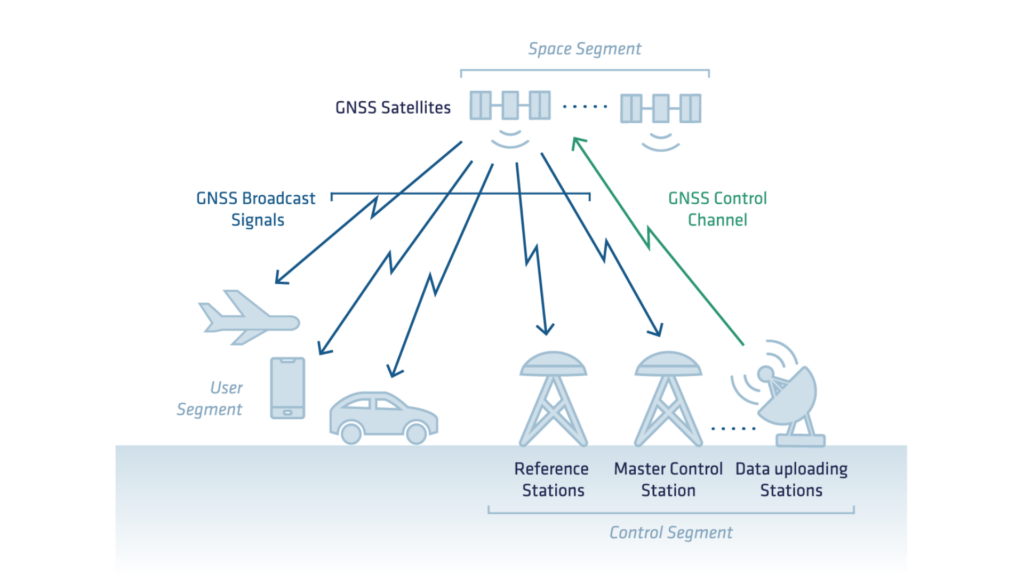
除了卫星之外,GNSS 系统还包括其他基本组成部分:
- 卫星部分,包括卫星星座。
- 控制段由地面控制站和设备组成。其职责是监测卫星星座、确定卫星位置,并确保其持续和正确运行。
- 用户端,涉及用于根据从卫星接收的信号计算位置的设备。
GNSS 基本原理:三边测量
GNSS 利用多颗卫星的信号,通过三边测量法确定接收器的位置和时间。
为了计算位置,系统必须解算四个变量:纬度、经度、高度和时间。此过程至少需要四颗卫星,尽管额外的卫星可以提高精度和可靠性。
下图说明了三边测量法的工作原理。每颗卫星都在其周围定义一个球体,表示到接收器的可能距离。
第二颗卫星将可能的解决方案缩小到这两个球体的交集。第三颗卫星进一步细化解决方案,使系统能够精确定位一个位置。在实际应用中,系统还必须考虑时间,这需要第四颗卫星。
卫星发出的信号
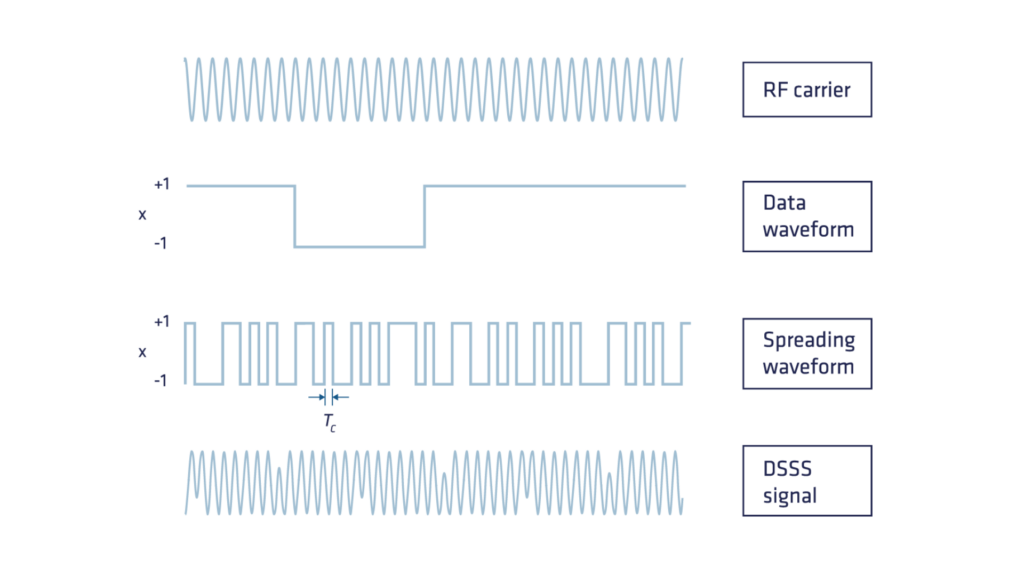
GNSS 卫星在各种频段(例如 L1、L2、L5 等)上传输信号。GNSS 信号有三个基本组成部分:
- 导航数据(低频):此数据由控制部分计算,包括基本信息,例如星历数据(计算卫星位置所需的开普勒轨道参数)、时钟校正数据和补充信息。上传到卫星并全球广播到 GNSS 接收器。
- 伪随机噪声码或 PRN 码:每颗卫星都发射一个独特的伪随机噪声 (PRN) 码,这是一种高频的确定性0和1序列,其设计具有可预测的模式,以便接收器可以复制它。添加 PRN 码的主要优势在于,它允许多颗卫星在同一频率上同时发射信号,并能被接收器识别。这种技术被称为码分多址 (CDMA),它为每颗卫星分配一个独特的伪随机码。只有 Glonass 使用频分多址 (FDMA),其中每颗卫星的频率略有不同。
- 射频载波:最初设计用于传输导航数据和 PRN 码 的组合信号的正弦信号。稍后我们将看到此组件如何演变为 GNSS 信号的基础,从而实现厘米级的定位精度。
测量到卫星的距离:码相位和载波相位
最初,GPS 系统设计为接收机利用 PRN 码副本和自相关技术来计算卫星到接收机的亚米级距离。然而,最初用于 PRN 码传输的载波被证明是一项宝贵的资产。
载波相位测量虽然更精确,但在确定卫星和接收机之间的距离时引入了模糊性。对这两种测量的进一步探讨将在下文介绍。
使用PRN码进行卫星到接收机的距离计算
GNSS 接收机采用一种称为“延迟锁定环”的过程,以确定发射码和接收码之间的时间延迟。这种时间延迟对应于信号传播时间,然后通过将其乘以光速转换为距离。
然而,由于接收机和卫星时钟不同步,所得距离被称为伪距。除了时钟同步误差之外,伪距还受到与传播环境(大气、硬件等)相关的其他几种误差的影响,这些误差将在文章后面讨论。
卫星到接收器范围的改进:载波相位测量
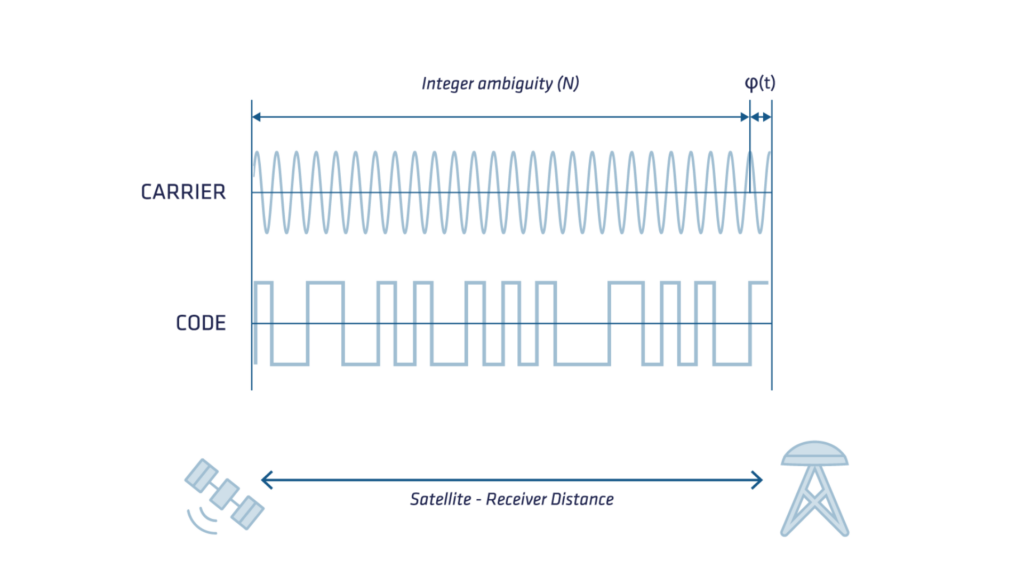
卫星与接收器之间的距离也可以通过计算信号发射和接收之间经过的相位周期数,并将其乘以载波波长来确定。
这种测量比码测量精确两个数量级,但一个恒定的未知整数周期数(也称为模糊度)会影响其绝对精度。为了确定载波相位的精确演变,GNSS 接收器会累积由卫星到接收器的相对运动引起的载波多普勒频移。
在信号中断的情况下,这种累积过程无法解释实际运动,并且可能会观察到测量中突然的跳变,也称为“周跳”。
正确处理周跳和模糊度是精密定位技术(如实时动态定位 (RTK) 和精密单点定位 (PPP))中具有挑战性的关键方面。
下图显示了信号载波、码及其各自的分辨率。
GNSS 中的误差源
GPS 最初的公众精度(非军用)约为 100 米。经过多年的发展(取消选择性可用性、部署新的星座和 SBAS 系统、新卫星和新频率),独立 GNSS 的精度现在在入门级 GNSS 接收器的 5 米到高端 GNSS 接收器的 1 米之间。
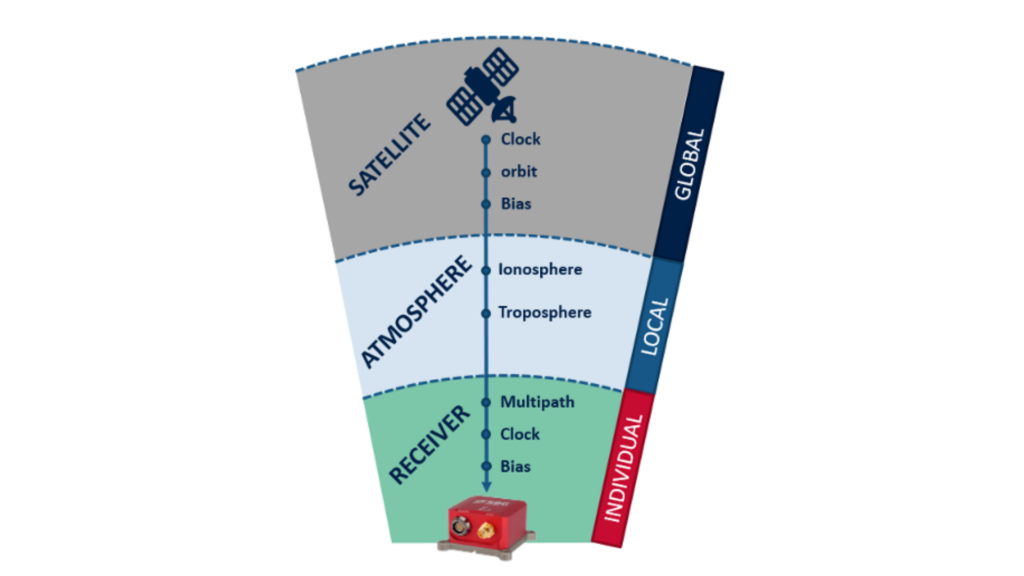
卫星误差
- 时钟误差:虽然 GNSS 卫星上的原子钟非常精确,但它们会经历轻微的漂移。不幸的是,即使卫星时钟出现轻微偏差,也可能导致接收器计算出的位置出现重大差异。例如,仅仅 10 纳秒的时钟误差就会导致测距仪上的位置误差为 3 米!
- 轨道误差:虽然 GNSS 卫星遵循高度精确且有据可查的轨道,但这些轨道会发生轻微变化,类似于卫星时钟。与时钟不准确一样,即使卫星轨道发生轻微变化,也可能导致计算出的位置出现重大误差。轨道中的残余误差仍然存在,导致潜在的位置误差高达 ±2.5 米。
大气误差
- 电离层延迟:电离层位于地球上方 50 至 1,000 公里处,包含影响无线电信号传输的带电离子,从而导致位置误差(通常为 ±5 米,在电离层活动加剧期间更高)。电离层延迟随太阳活动、白天、季节和位置而变化,因此预测具有挑战性。
- 对流层延迟:地球的直接大气层,即对流层,其延迟变化受到湿度、温度和大气压变化的影响。
接收机误差
与卫星原子钟相比,接收器的内部时钟精度较低,以及其他硬件和软件错误会给测量增加噪声和偏差。
| 延迟 | 原点 | 量级 |
|---|---|---|
| 位置误差 | 卫星 | 5m |
| 时钟偏移 | 卫星 | 0-300 公里 |
| 仪器延迟 | 卫星 | 1-10 米 |
| 相对论效应 | 卫星 | 10 m |
| 电离层延迟 | 路径(50-1000 公里) | 2-50 米 |
| 对流层延迟 | 路径(0-12 公里) | 2-10 米 |
| 仪器延迟 | 接收机 | 1-10 米 |
| 时钟偏移 | 接收机 | 0-300 公里 |
为确保最佳导航,系统必须考虑这些误差,使用特定的误差模型对其进行缓解,或通过导航滤波器对其进行估算。
位置计算还应考虑本文未列出的许多其他误差项,例如潮汐效应和相对论效应。
各种误差源会影响 GNSS 技术的性能,该技术提供高精度的定位、导航和授时。
诸如大气延迟、卫星时钟和星历误差、多径干扰以及接收机噪声等因素会降低精度。虽然现代校正技术(差分 GNSS、RTK 和 PPP)有助于减轻 GNSS 及其误差源,但了解其来源对于优化 GNSS 性能仍然至关重要。
随着信号处理、传感器融合和机器学习的不断发展,GNSS 系统将变得更加稳健,从而确保在各种应用中具有更高的可靠性。
