Покращення процесу збору даних для аерофотозйомки
Інерційні системи, такі як інерційні вимірювальні блоки (ІВБ) та інерційні навігаційні системи (INS), є ключовими компонентами аерофотозйомки.
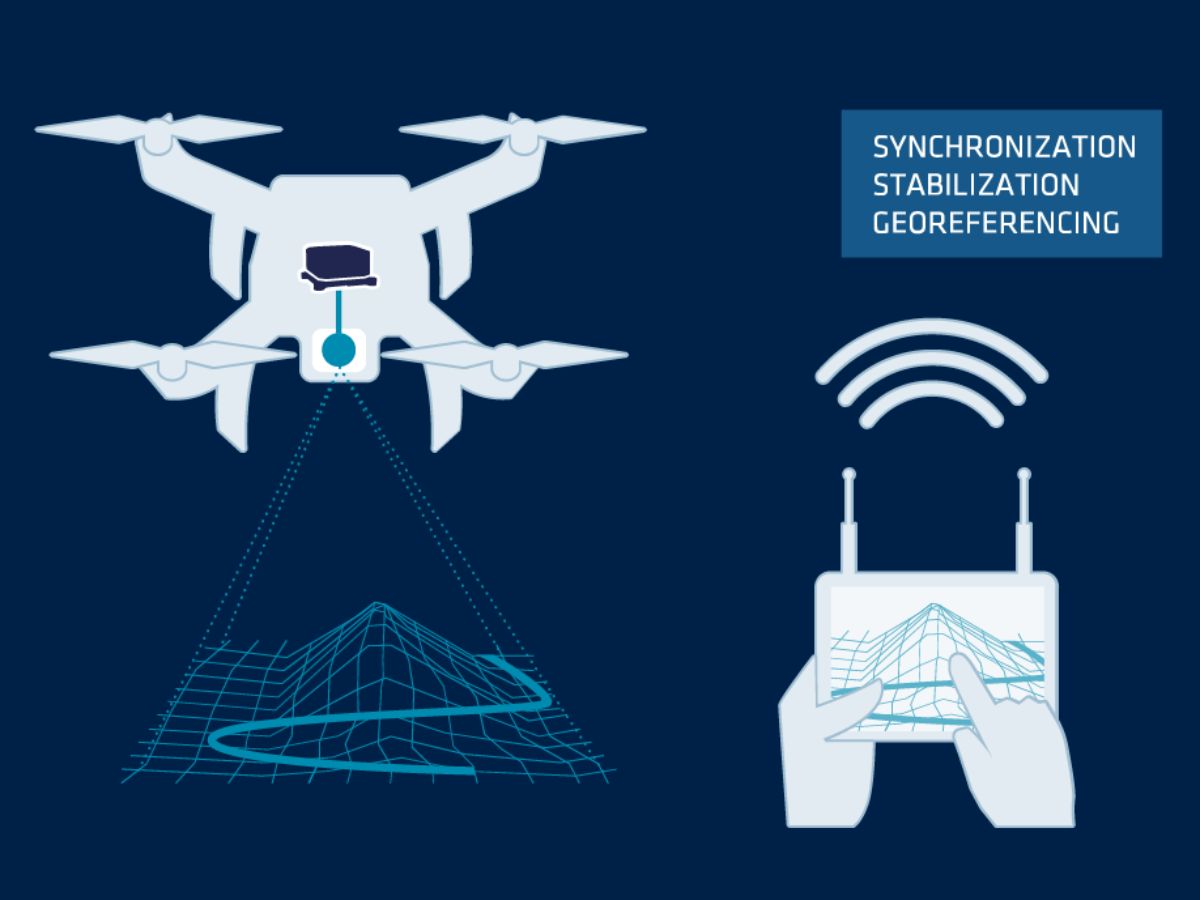
Ці системи надають дані в режимі реального часу про орієнтацію, положення та рух літака, що дозволяє здійснювати точне геореферування зібраних зображень та даних датчиків. Інерційні системи працюють у поєднанні з GNSS Глобальною навігаційною супутниковою системою), щоб забезпечити збір точної просторової інформації літаком навіть у разі слабкого сигналу GNSS або його відсутності.
Однією з істотних переваг використання інерційних систем у аерофотозйомці є їхня здатність компенсувати рухи літака, такі як pitch, roll і відхилення, які можуть впливати на якість зібраних даних. Постійно вимірюючи положення літака, інерційні системи виправляють будь-які спотворення зображень або даних датчиків, забезпечуючи узгодженість і точність результатів. Це особливо важливо в таких системах, як LiDAR, де незначні неточності можуть призвести до суттєвих помилок у кінцевому наборі даних.
Крім того, інерційні системи підвищують ефективність аерофотозйомки, забезпечуючи швидший збір даних без втрати точності. Геодезисти можуть літати на більшій висоті та з більшою швидкістю, охоплюючи більшу територію за менший час, що дозволяє знизити експлуатаційні витрати, не поступаючись при цьому високою якістю результатів.
Ознайомтеся з нашими рішеннями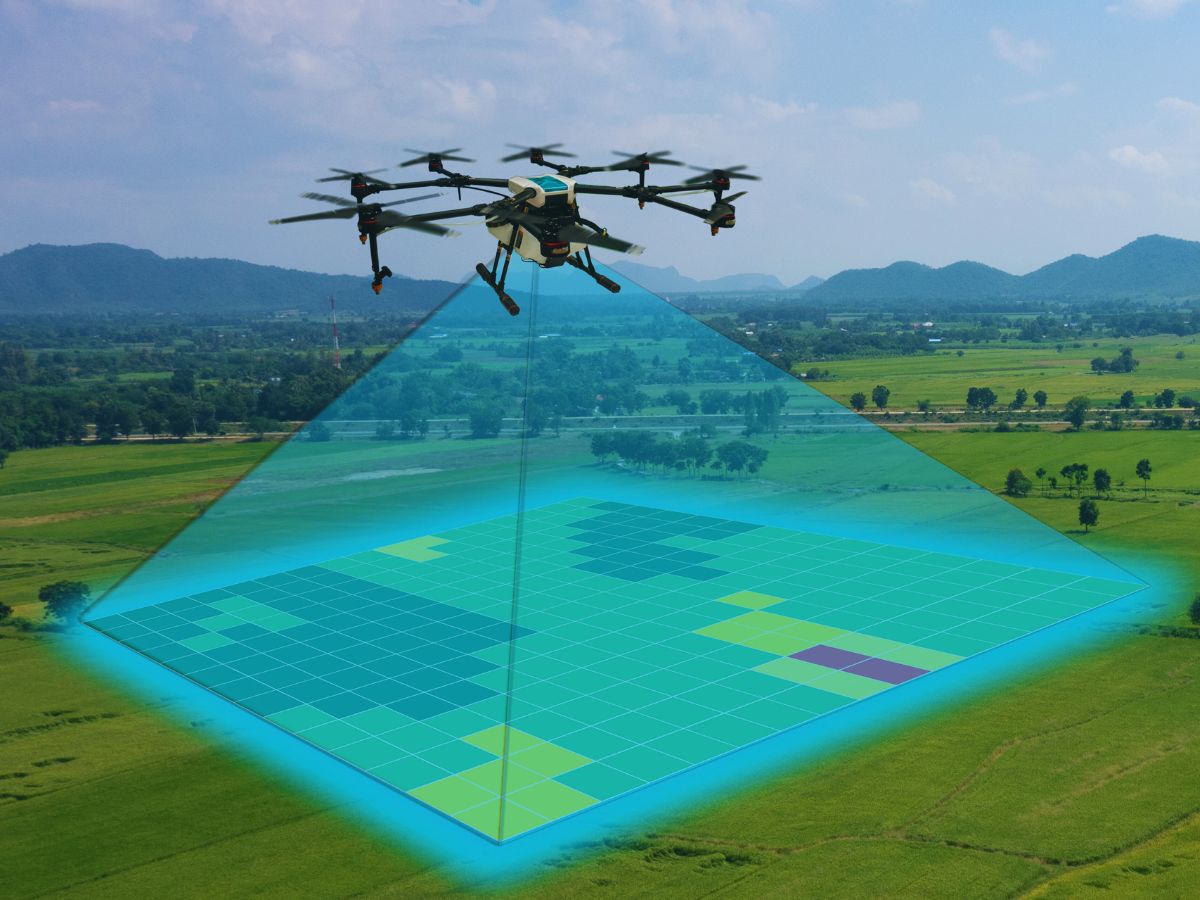
Застосування інерційних систем у аерофотозйомці
Інерційні системи відіграють вирішальну роль у різних сферах застосування аерофотозйомки. Наприклад, картографування коридорів передбачає обстеження довгих і вузьких ділянок, таких як дороги, залізниці або трубопроводи. ІМУ та INS точно вирівнювати дані вздовж картографованого маршруту.
Це дозволяє інженерам та планувальникам робити точні розрахунки для розвитку та обслуговування інфраструктури.
У лісовому господарстві та сільському господарстві інерційні системи допомагають дронам або літакам літати над великими територіями для збору важливих даних. Ці дані допомагають в управлінні ресурсами, моніторингу врожаю та охороні навколишнього середовища. Точне картографування лісів та полів покращує прийняття рішень щодо землекористування, зрошення та збору врожаю. Ці відомості підвищують продуктивність, одночасно зменшуючи вплив на навколишнє середовище.
У будівництві та містобудуванні аерофотозйомка з використанням інерційних систем забезпечує детальні топографічні карти та 3D-моделі місцевості. Ці набори даних є необхідними для проектування та реалізації великомасштабних проектів, оскільки вони дають чітке уявлення про особливості місцевості та потенційні виклики. Крім того, інерційні системи забезпечують обробку даних у реальному часі, що прискорює реалізацію проектів та покращує процес прийняття рішень.
Аерофотозйомка, визначення координат та навігація в режимі реального часу
У аерофотозйомці поєднання інерційної INS GNSS надійне рішення для визначення координат і навігації в режимі реального часу. Ці системи працюють у тандемі, забезпечуючи безперервний потік високоточних даних незалежно від умов навколишнього середовища. У середовищах, denied, таких як густі ліси або сильна хмарність, інерційні системи забезпечують точне позиціонування. Вони гарантують безперебійне продовження зйомки навіть без супутникових сигналів.
INS визначає положення літального апарата за допомогою акселерометрів та гіроскопів. Ці датчики відстежують прискорення та обертальні рухи. У поєднанні з GNSS це створює повну картину траєкторії польоту та положення літального апарата. Таке точне позиціонування гарантує, що всі зібрані дані мають точну геоприв’язку.
Визначення координат у режимі реального часу має вирішальне значення в динамічних середовищах, де умови швидко змінюються, таких як зони стихійних лих (наприклад, лісові пожежі) або діючі будівельні майданчики. Це дозволяє оперативно коригувати траєкторії польоту та налаштування збору даних. Така гнучкість допомагає геодезистам фіксувати найважливішу інформацію. Як результат, загальна якість та корисність даних зйомки підвищується.

Ознайомтеся з нашими рішеннями для аерофотозйомки
Наші продукти для вимірювання руху та навігації розроблені з урахуванням потреб аерофотозйомки. Наші високоефективні INS з GNSS визначення координат, навігацію та орієнтацію в режимі реального часу. Вони гарантують високу точність і надійність під час проведення аерофотозйомки.

Quanta Extra
Qinertia GNSS-INS
Брошура про програми для геодезії
Отримайте нашу брошуру прямо на свою електронну пошту!
Приклади застосування
Дізнайтеся, як наші продукти успішно застосовуються у сфері аерофотозйомки по всьому світу.
Наші приклади з практики демонструють, як інерційні системи SBG Systemsпідвищують точність, надійність та ефективність проектів з аерофотозйомки.
Від масштабних обстежень інфраструктури до моніторингу стану навколишнього середовища — наші інерційні системи довели свою ефективність у найрізноманітніших сферах застосування.
Ідеальна точність та ефективність картографування за допомогою LiDAR із Quanta Micro
LiDAR картографування

SBG Systems GNSS SBG Systems GNSS топографічних та батиметричних досліджень із використанням БПЛА
Топографія та батиметрія
Компенсація руху та геореференціювання даних LiDAR, отриманих за допомогою БПЛА
Геодезичні роботи з використанням безпілотних літальних апаратів


Про нас говорять
Послухайте безпосередньо від новаторів та клієнтів, які вже використовують нашу технологію.
Їхні відгуки та історії успіху свідчать про значний вплив наших датчиків на практичне застосування в навігації безпілотних літальних апаратів.
Ознайомтеся з іншими програмами для геодезії
Відкрийте для себе весь потенціал наших передових рішень в області інерційної навігації, які застосовуються в широкому спектрі геодезичних завдань. Наша технологія підтримує операції на суші, в повітрі та на морі. Вона забезпечує надійність даних, високу точність та стабільну роботу в будь-яких умовах.
У вас є питання?
Ласкаво просимо до розділу «Часті запитання»! Тут ви знайдете відповіді на найпоширеніші запитання щодо програм, які ми презентуємо. Якщо ви не знайдете потрібної інформації, звертайтеся до нас безпосередньо!
Як поєднати інерційні системи з лідаром для картографування за допомогою дронів?
Поєднання інерційних систем SBG Systemsз технологією LiDAR для картографування за допомогою дронів підвищує точність і надійність збору точних геопросторових даних.
Ось як працює ця інтеграція та які переваги вона дає для картографування за допомогою дронів:
- Метод дистанційного зондування, який використовує лазерні імпульси для вимірювання відстаней до поверхні Землі, створюючи детальну 3D-карту місцевості або споруд.
- SBG Systems INS інерційний вимірювальний блок (IMU) з GNSS , забезпечуючи точне визначення координат, орієнтації (pitch, roll, поворот) та швидкості навіть уdenied .
Інерційна система SBG синхронізована з даними LiDAR. Інерційна навігаційна система INS відстежує положення та орієнтацію дрона, тоді як LiDAR фіксує деталі місцевості або об’єктів, що знаходяться внизу.
Знаючи точне положення дрона, дані LiDAR можна точно розмістити у тривимірному просторі.
GNSS забезпечує глобальне позиціонування, а IMU дані про орієнтацію та рух у режимі реального часу. Таке поєднання гарантує, що навіть за умови слабкого або відсутнього GNSS (наприклад, поблизу висотних будівель або густих лісів) INS продовжувати відстежувати траєкторію та положення дрона, забезпечуючи безперебійне LiDAR-картування.
Що таке геореференціювання в аерофотозйомці?
Геореференціювання — це процес прив’язки географічних даних (таких як карти, супутникові знімки або аерофотознімки) до відомої системи координат, щоб їх можна було точно розмістити на поверхні Землі.
Це дозволяє інтегрувати дані з іншою просторовою інформацією, що дає змогу проводити точний аналіз та створювати карти на основі географічного розташування.
У сфері геодезії геореференціювання відіграє ключову роль у забезпеченні точного прив’язування даних, зібраних за допомогою таких інструментів, як LiDAR, камери або датчики на дронах, до реальних координат.
Завдяки прив'язці кожної точки даних до широти, довготи та висоти над рівнем моря геореференціювання гарантує, що зібрані дані точно відображають місце розташування та орієнтацію на Землі, що має вирішальне значення для таких сфер застосування, як геопросторове картографування, моніторинг навколишнього середовища та планування будівництва.
Геореференціювання зазвичай передбачає використання контрольних точок із відомими координатами, які часто визначаються за допомогою GNSS наземних геодезичних вимірювань, для прив’язки отриманих даних до системи координат.
Цей процес має вирішальне значення для створення точних, надійних і придатних для використання наборів просторових даних.
Що таке фотограмметрія?
Фотограмметрія — це наука та техніка, що полягає у використанні фотографій для вимірювання та відображення відстаней, розмірів та особливостей об’єктів або навколишнього середовища. Завдяки аналізу знімків, зроблених під різними кутами та що перекриваються, фотограмметрія дозволяє створювати точні 3D-моделі, карти або проводити вимірювання. Цей процес базується на визначенні спільних точок на декількох фотографіях та обчисленні їхнього положення у просторі з використанням принципів триангуляції.
Фотограмметрія широко застосовується в різних галузях, таких як:
- Фотограмметричне топографічне картографування: створення 3D-карт ландшафтів та міських територій.
- Архітектура та інженерія: для підготовки будівельної документації та проведення конструктивного аналізу.
- Фотограмметрія в археології: документування та реконструкція пам’яток і артефактів.
- Аерофотограмметрична зйомка: для геодезичних робіт та планування будівництва.
- Лісове та сільськогосподарське господарство: моніторинг сільськогосподарських культур, лісів та змін у землекористуванні.
Поєднання фотограмметрії з сучасними дронами або БПЛА (безпілотними літальними апаратами) дозволяє швидко збирати аерофотознімки, що робить її ефективним інструментом для реалізації масштабних проектів у сферах геодезії, будівництва та моніторингу навколишнього середовища.
Що таке IMU
Інерційний вимірювальний блок (IMU) — це компактний сенсорний модуль, який вимірює рух та орієнтацію платформи шляхом реєстрації її лінійних прискорень та кутових швидкостей обертання. В основі IMU трьох акселерометрів та трьох гіроскопів, розташованих вздовж ортогональних осей, що забезпечує вимірювання у шести вимірах.
Акселерометри фіксують прискорення платформи у просторі, а гіроскопи відстежують її обертання. Обробляючи ці вимірювання разом, IMU надає точну інформацію про зміни швидкості, положення та heading покладаючись на жодні зовнішні сигнали. Це робить IMU незамінними для навігації в середовищах, де GPS недоступний, ненадійний або навмисно denied. Їхня ефективність значною мірою залежить від якості датчиків, калібрування та того, наскільки добре контролюються похибки — такі як зміщення, шум, коефіцієнти масштабування та розбіжності.
Високоякісні інерційні вимірювальні блоки (ІМУ) оснащені вдосконаленими механізмами калібрування, температурної компенсації, фільтрації вібрацій та стабілізації зміщення, що запобігає швидкому накопиченню похибок з часом. Завдяки цим характеристикам ІМУ застосовуються в широкому спектрі сфер — від безпілотних літальних апаратів (БПЛА), боєприпасів типу «лоітерінг» та автономних транспортних засобів до підводних безпілотних апаратів (АУВ), робототехніки та промислових систем стабілізації— забезпечуючи надійний і безперервний контроль руху та орієнтації навіть у найсуворіших умовах експлуатації.
