Американські військові кладовища оцифровано для виконання урочистої місії
«Ми обрали Ellipse завдяки тому, що це універсальне рішення, яке поєднує в собі GNSS інерційну навігацію, втілене у компактному пристрої з низьким енергоспоживанням». | Метью Р. Стейлі, науковий співробітник з питань військової інженерії та геодезичної підтримки в Геопросторовому центрі армії США
Армійський геопросторовий центр (AGC) застосував інноваційні технології, щоб допомогти відвідувачам американських військових кладовищ знайти могили своїх близьких.
Традиційні методи GPS-зйомки та технології 3D-картографування були інтегровані та встановлені на рюкзаку, спеціально сконструйованому для збору даних у рамках цього проєкту.
Веб-інтерфейс, що слугує платформою для опрацювання зібраних даних, надає відвідувачам зручний інструмент для пошуку могил родичів та доступу до розширеної інформації, що зберігається в базі даних ГІС.
Пілотний проект для урочистої місії
Пошук конкретного надгробка на американському національному кладовищі часто вимагає від адміністраторів ретельного й тривалого вивчення архівних документів.
Щоб допомогти відвідувачам легко знайти могили своїх близьких, Геопросторовий центр армії США (AGC) у співпраці з Національним кладовищем Арлінгтона (ANC) реалізував пілотний проєкт, що охоплює кладовища в Корозалі (Панама) та Нормандії (Франція), які разом налічують понад 15 000 могил.
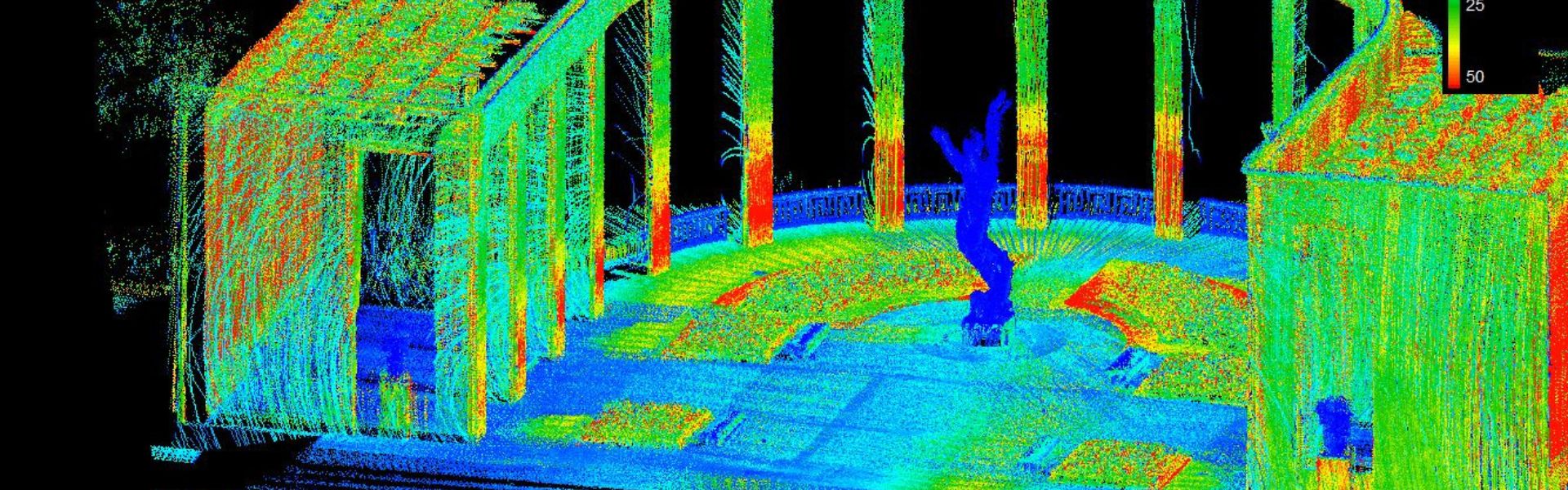
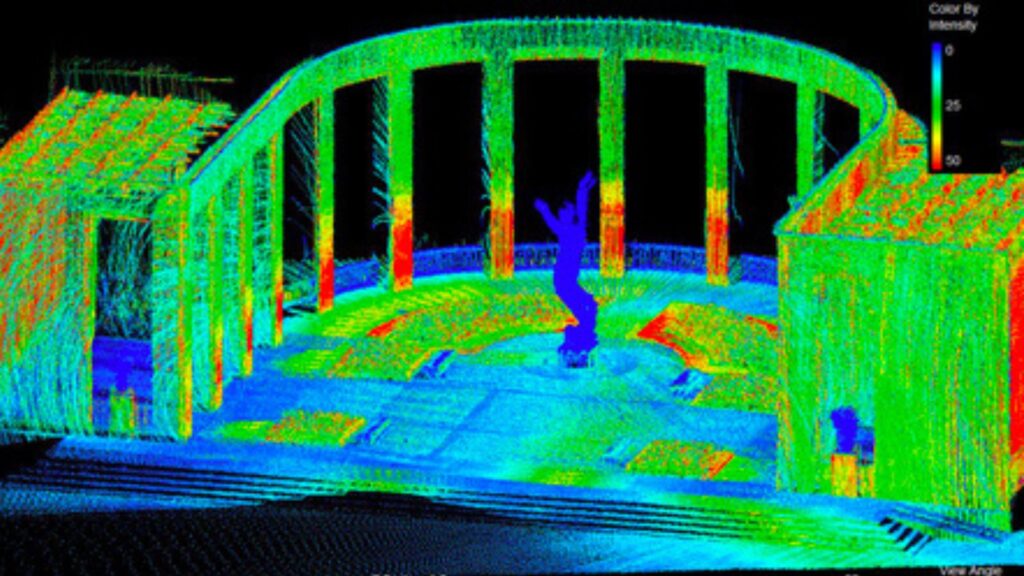
Цей масштабний проект поєднує традиційні методи геодезії та сучасні технології для створення віртуальних моделей обох кладовищ.
Моделі включають не тільки рельєф місцевості та GPS-координати кожного надгробка або меморіалу, а й такі об’єкти, як дороги, тротуари, дерева, бордюри, водостоки, пам’ятники та багато інших штучних споруд із точністю до 10 см (3,9 дюйма).
Фотографії з географічною прив'язкою передньої та задньої частин кожного надгробка, що допомагають в ідентифікації, доповнили рішення щодо збору даних.
Зібрані дані були оброблені та інтегровані на ноутбуці ENFIRE. Завдяки цим інноваціям відвідувачі можуть отримати доступ до даних кладовищ, шукати своїх близьких або знаходити історично значущі могили, використовуючи кіоски в закладах, де працює програма ANC Explorer.
Віртуальні відвідувачі мають ідентичні можливості, використовуючи програму на своєму домашньому комп'ютері або мобільному пристрої.
Метод мобільного картографування з використанням рюкзака
З метою створення максимально детальних карт кладовищ у повному обсязі Метью Р. Стейлі, науковий співробітник з питань військової інженерії та геодезичної підтримки в Геопросторовому центрі армії США, розробив мобільну систему картографування, що встановлюється на рюкзак.
Використання цього обладнання мінімізує витрати за рахунок скорочення часу збору даних та надання даних у форматах, які легко обробляти. Воно використовує інструменти, що застосовуються військовими геодезичними службами США, — ENFIRE та GPS-S.
«Я поєднав LiDAR від Velodyne з інерційною навігаційною системою (INS) Ellipse із вбудованим RTK GPS від SBG Systems, — пояснює Метью Р. Стейлі.
Він обрав Ellipse завдяки тому, що це універсальне рішення, яке поєднує в собі GNSS інерційну навігацію, вбудовані в компактний пристрій з низьким енергоспоживанням.
СистемаGNSS компенсацію руху та геореференціювання хмари точок. Крім того, для досягнення максимальної точності на території кладовища було встановлено базову станцію RTK (Real Time Kinematic). Також програмне забезпечення Hypack забезпечило ефективне управління отриманою хмарою точок.
Налаштування магнітного схилення
Однією з проблем була калібрування магнітометра, на яке впливає вміст заліза в місцевості. Магнітне схилення змінюється залежно від місцезнаходження; отже, під час транспортування рюкзака зі США до Франції магнітне схилення змінилося.
Американське Національне агентство з океанографії та атмосфери (NOAA) оновлює глобальну карту магнітного поля Землі кожні 5 років.
Цю карту можна використовувати, вказавши конкретне місце та дату, щоб визначити магнітне схилення в цьому конкретному місці.
SBG Systems цю карту у свої інерційні навігаційні системи, що дозволяє автоматично heading істинний північ heading використання магнітометрів.
Вимірювання навколо дерев
Ще однією проблемою стало проведення зйомки поблизу певних видів дерев, які суттєво впливають на прийом супутникового сигналу. Пан Стейлі модифікував процедуру збору даних, щоб компенсувати цю проблему, і продовжує досліджувати способи подальшого зменшення впливу рослинності на якість прийому.
Крім того, буде вивчено можливість зменшення дальності дії LiDAR для досягнення вищої точності (загалом +/- 5 см) як спосіб зменшення артефактів відхилення.
«Я незабаром протестую програмне забезпечення для постобробки Qinertia від SBG, воно може допомогти зберегти високу точність за будь-яких умов», — додає інженер збройних сил США.
Програмне забезпечення для кінематичної постобробки (PPK), таке як Qinertia, надає доступ до офлайн-поправок RTK та покращує ефективність інерційних навігаційних систем завдяки постобробці інерційних даних із використанням необроблених GNSS за допомогою алгоритму, відомого як «Forward-Backward-Merge».
Нещодавно випущене програмне забезпечення Qinertia було розроблено з урахуванням інтуїтивності та простоти у використанні, а незалежні експерти визнали його найшвидшим програмним забезпеченням для постобробки на ринку.
Що далі?
Головним завданням було зібрати дані про поховання та перевірити можливість застосування інструментаріїв ENFIRE, GPS-S і LiDAR для експлуатації та управління Національним кладовищем Арлінгтона.
Вони переконалися в можливості проводити обстеження території, оновлювати записи та оцінювати будівельні роботи за допомогою зібраних даних LiDAR.
Крім того, вони розробили стратегічні плани, що дозволили підвищити ефективність бізнес-процесів.
Тепер, коли пілотна фаза завершилася, Геопросторовий центр армії тісно співпрацює з Національним кладовищем Арлінгтона та Американською комісією з пам'ятників битв, щоб оцінити отримані результати та визначити стратегію для майбутніх вдосконалень та інновацій.
Початкові результати довели, що витрати були мінімізовані порівняно з попередніми заходами. Більше того, багато громад отримали чудову загальну окупність інвестицій.


Ellipse-D
Ellipse — це інерційна навігаційна система, GNSS поєднує в собі двоантенну двочастотну систему RTK GNSS сумісна з нашим програмним забезпеченням для пост-обробки даних Qinertia.
Розроблена для використання в робототехніці та геопросторових додатках, вона дозволяє об'єднувати дані одометра з Pulse даними CAN OBDII для підвищення dead-reckoning .

Запитайте ціну на Ellipse
У вас є питання?
Ласкаво просимо до розділу «Часті запитання»! Тут ви знайдете відповіді на найпоширеніші запитання щодо програм, які ми презентуємо. Якщо ви не знайдете потрібної інформації, звертайтеся до нас безпосередньо!
Чи INS сигнали від зовнішніх допоміжних датчиків?
Інерційні навігаційні системи нашої компанії приймають сигнали від зовнішніх допоміжних датчиків, таких як датчики аеродинамічних даних, магнітометри, одометри, цифрові лінійні датчики (DVL) та інші.
Така інтеграція робить INS універсальною та надійною системою, особливо вdenied .
Ці зовнішні датчики підвищують загальну ефективність та точність інерційної навігаційної системи ( INS надаючи додаткові дані.
У чому полягає різниця між AHRS INS?
Основна відмінність між системою орієнтації та курсу (AHRS) та інерційною навігаційною системою (INS) полягає в їхній функціональності та обсязі даних, які вони надають.
AHRS інформацію про орієнтацію, а саме про положення (pitch, roll) та heading поворот) транспортного засобу або пристрою. Зазвичай вона використовує комбінацію датчиків, зокрема гіроскопів, акселерометрів та магнітометрів, для обчислення та стабілізації орієнтації. AHRS кутове положення по трьох осях (pitch, roll та відхилення), що дозволяє системі розуміти своє положення у просторі. Вона часто використовується в авіації, безпілотних літальних апаратах, робототехніці та морських системах для надання точних heading положення та heading , що є критично важливим для керування та стабілізації транспортного засобу.
Система INS тільки надає дані про орієнтацію (як і система AHRS), але й відстежує положення, швидкість та прискорення транспортного засобу в динаміці. Вона використовує інерційні датчики для оцінки руху в тривимірному просторі, не покладаючись на зовнішні джерела, такі як GNSS. Система поєднує датчики, що входять до складу AHRS гіроскопи, акселерометри), але також може містити більш досконалі алгоритми для відстеження положення та швидкості, часто інтегруючись із зовнішніми даними, такими як GNSS підвищення точності.
Отже, AHRS на орієнтації (кут нахилу та heading), тоді як INS повний набір навігаційних даних, включаючи координати, швидкість та орієнтацію.
У чому полягає різниця між IMU INS?
Різниця між інерційним вимірювальним блоком (IMU) та інерційною навігаційною системою (INS) полягає в їхній функціональності та складності.
IMU інерційний вимірювальний блок) надає необроблені дані про лінійне прискорення та кутову швидкість транспортного засобу, виміряні акселерометрами та гіроскопами. Він надає інформацію про roll, pitch, рискання та рух, але не обчислює дані про положення або навігацію. IMU спеціально IMU для передачі основних даних про рух та орієнтацію для зовнішньої обробки з метою визначення положення або швидкості.
З іншого боку, INS інерційна навігаційна система) поєднує IMU з передовими алгоритмами для обчислення положення, швидкості та орієнтації транспортного засобу в часі. Вона включає навігаційні алгоритми, такі як фільтрація Калмана, для злиття та інтеграції даних датчиків. INS навігаційні дані в режимі реального часу, включаючи положення, швидкість та орієнтацію, не покладаючись на зовнішні системи позиціонування, такі як GNSS.
Ця навігаційна система зазвичай використовується в додатках, що вимагають комплексних навігаційних рішень, особливо вdenied , таких як військові БПЛА, кораблі та підводні човни.
У чому різниця GNSS GPS?
GNSS «Глобальна навігаційна супутникова система», а GPS — «Глобальна система позиціонування». Ці терміни часто вживаються як синоніми, проте вони позначають різні поняття в рамках супутникових навігаційних систем.
GNSS загальний термін, що позначає всі супутникові навігаційні системи, тоді як GPS стосується саме американської системи. До GNSS входять численні системи, що забезпечують більш повне глобальне покриття, тоді як GPS є лише однією з цих систем.
Завдяки GNSS ви отримуєте вищу точність і надійність завдяки об’єднанню даних з декількох систем, тоді як використання лише GPS може мати певні обмеження, що залежать від наявності супутників та умов навколишнього середовища.
