Мобільне картографування на базі технології SLAM
vMS3D — це система мобільного картографування, що поєднує в собі найкращі риси інерційних, GNSS та SLAM-технологій.
« ІINS Ellipse INS надзвичайно точні дані про швидкість». | Пан Ніно, засновник компанії VIAMETRIS

VIAMETRIS є піонером у розробці рішень на основі технології SLAM. Два роки тому компанія випустила iMS3D — систему картографування приміщень, що базується на технології SLAM.
Спираючись на цей досвід, компанія щойно представила нове рішення: vMS3D — мобільну систему картографування, яка поєднує в собі найкращі риси інерційних, GNSS та SLAM-технологій, пропонуючи інноваційне рішення з привабливим співвідношенням ціни та якості.
Найрозумніша система мобільного картографування
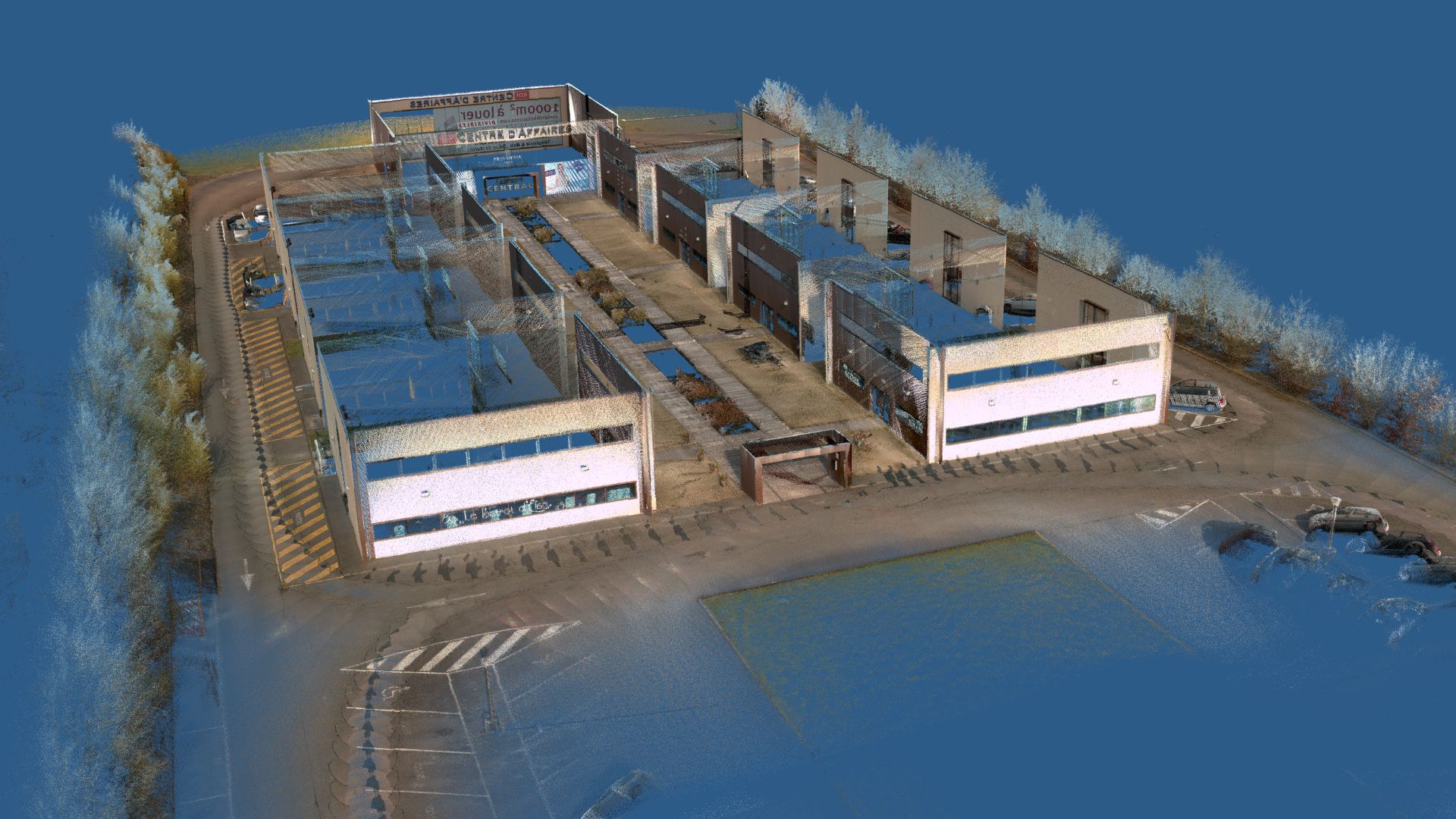
vMS3D виглядає як класична система мобільного картографування (MMS). Вона об’єднує в собі 360°-камеру, обертовий лідар та вбудовану навігаційну систему з GNSS .
Простий автоматичний робочий процес не виявляє тонких, але водночас складних внутрішніх обчислень, які роблять її унікальною. Дійсно, vMS3D оснащений додатковим LiDAR, який використовується для обчислень SLAM.
Після збору даних програмне забезпечення для постобробки, яке називається PPiMMS, автоматично аналізує ситуації, в яких GNSS , де краще використовувати інерційну систему або де потрібен SLAM.
Найкраще з GNSS, інерційних систем та SLAM
Рішення vMS3D враховує переваги та недоліки кожної технології залежно від умов їхнього використання:
- GNSS: Коли GNSS надає надійні дані, наприклад у умовах відкритого неба, рішення базується на його координатах. У разі GNSS або перешкод GNSS система обирає між даними інерційної системи або даними, отриманими за допомогою SLAM
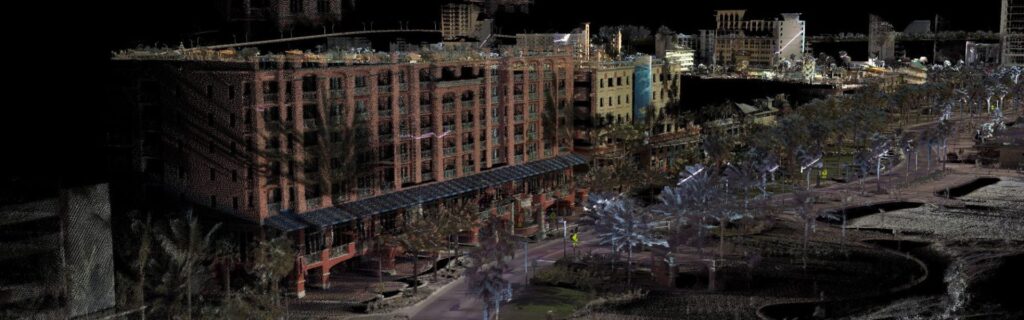
- SLAM: Координати, обчислені за допомогою SLAM, є кращим варіантом у щільних середовищах, де навколишні об’єкти дуже різноманітні та розташовані близько один до одного, наприклад у міських каньйонах або лісах. Можливості SLAM обмежені в середовищах, де об’єкти знаходяться занадто далеко або їх неможливо розрізнити.
- Інерційна система: Дані про швидкість та орієнтацію, що надаються інерційною навігаційною системою (INS), можуть допомогти в навігації у всіх випадках, коли GNSS SLAM є обмеженими. Інерційна навігаційна система забезпечує дані roll pitch калібрування всіх даних LiDAR, завдяки чому хмара точок прив’язується до рівня землі. Швидкість повороту також дуже корисна, особливо коли відбувається різка зміна напрямку. Дійсно, коли LiDAR перебуває в русі, між двома скануваннями необхідна компенсація орієнтації.
Ellipse — розумний вибір від VIAMETRIS
Я вже дуже задоволений Ellipse для своєї системи iMS3D для приміщень, Жером Ніно, засновник компанії VIAMETRIS, не став довго шукати, щоб вибрати INS свого нового інноваційного проекту.
INS Ellipse INS дуже, дуже точні дані про швидкість», — зазначає пан Ніно.
Інноваційні обчислення SLAM дозволяють VIAMETRIS покладатися на мініатюрні та економічно вигідні інерційні датчики, тоді як інші системи на ринку вимагають інерційних систем з вищою точністю. Ellipse забезпечують точність орієнтації на рівні 0,1°.
Пан Нінот також обрав модель Ellipse завдяки її універсальному та мініатюрному форм-фактору, а також вбудованому GNSS .
«Завдяки інтегрованій системі INS , INS Ellipse, що має єдиний інтерфейс зв’язку та вбудовану синхронізацію з GNSS LiDAR, ми змогли зосередитися на нашій експертизі в галузі SLAM», — додає генеральний директор, зазначивши при цьому, що зменшення кількості кабелів — це завжди правильний вибір.
Ellipse — надійний партнер у виконанні різноманітних завдань
Інтегрований у це інноваційне рішення, Ellipse виконує кілька завдань. По-перше, він надає roll pitch калібрування всіх даних LiDAR, завдяки чому хмара точок прив’язується до рівня землі.
По-друге, показники швидкості повороту Ellipse є дуже корисними, особливо під час різкої зміни напрямку руху. Адже коли LiDAR перебуває в русі, між двома скануваннями необхідна компенсація орієнтації.
Нарешті, Ellipse об'єднує в режимі реального часу інерційну GNSS та GNSS , щоб забезпечити точні вимірювання швидкості, що також дуже важливо для безперервної підтримки внутрішніх алгоритмів vMS3D.

Ellipse-D
Ellipse — це інерційна навігаційна система, GNSS поєднує в собі двоантенну двочастотну систему RTK GNSS сумісна з нашим програмним забезпеченням для пост-обробки даних Qinertia.
Розроблена для використання в робототехніці та геопросторових додатках, вона дозволяє об'єднувати дані одометра з Pulse даними CAN OBDII для підвищення dead-reckoning .

Запитайте ціну на Ellipse
У вас є питання?
Ласкаво просимо до розділу «Часті запитання»! Тут ви знайдете відповіді на найпоширеніші запитання щодо програм, які ми презентуємо. Якщо ви не знайдете потрібної інформації, звертайтеся до нас безпосередньо!
Як поєднати інерційні системи з лідаром для картографування за допомогою дронів?
Поєднання інерційних систем SBG Systemsз технологією LiDAR для картографування за допомогою дронів підвищує точність і надійність збору точних геопросторових даних.
Ось як працює ця інтеграція та які переваги вона дає для картографування за допомогою дронів:
- Метод дистанційного зондування, який використовує лазерні імпульси для вимірювання відстаней до поверхні Землі, створюючи детальну 3D-карту місцевості або споруд.
- SBG Systems INS інерційний вимірювальний блок (IMU) з GNSS , забезпечуючи точне визначення координат, орієнтації (pitch, roll, поворот) та швидкості навіть уdenied .
Інерційна система SBG синхронізована з даними LiDAR. Інерційна навігаційна система INS відстежує положення та орієнтацію дрона, тоді як LiDAR фіксує деталі місцевості або об’єктів, що знаходяться внизу.
Знаючи точне положення дрона, дані LiDAR можна точно розмістити у тривимірному просторі.
GNSS забезпечує глобальне позиціонування, а IMU дані про орієнтацію та рух у режимі реального часу. Таке поєднання гарантує, що навіть за умови слабкого або відсутнього GNSS (наприклад, поблизу висотних будівель або густих лісів) INS продовжувати відстежувати траєкторію та положення дрона, забезпечуючи безперебійне LiDAR-картування.
Що таке багатопроменеве ехолокаційне зондування?
Багатопроменеве ехолокаційне зондування (MBES) — це сучасна технологія гідрографічних досліджень, яка використовується для високоточного картографування морського дна та підводних об’єктів.
На відміну від традиційних однопроменевих ехолотів, які вимірюють глибину в одній точці безпосередньо під судном, система MBES використовує масив гідроакустичних променів для одночасного збору даних про глибину на широкій смузі морського дна. Це дозволяє створювати детальні карти підводного рельєфу з високою роздільною здатністю, включаючи топографію, геологічні особливості та потенційні небезпеки.
Системи MBES випромінюють звукові хвилі, які поширюються у воді, відбиваються від морського дна і повертаються до судна. Аналізуючи час, за який повертаються відлуння, система обчислює глибину в різних точках, створюючи детальну карту підводного рельєфу.
Ця технологія має важливе значення для різних сфер застосування, зокрема для навігації, морського будівництва, моніторингу стану навколишнього середовища та розвідки корисних копалин, забезпечуючи дані, необхідні для безпечного ведення морських операцій та раціонального використання морських ресурсів.
У чому полягає різниця між RTK і PPK?
«Кінематичне позиціонування в режимі реального часу» (RTK) — це метод позиціонування, при якому GNSS передаються майже в режимі реального часу, зазвичай у вигляді потоку поправок у форматі RTCM. Однак можуть виникати труднощі із забезпеченням GNSS , зокрема щодо їх повноти, доступності, зони покриття та сумісності.
Головною перевагою PPK над пост-обробкою RTK є те, що під час пост-обробки можна оптимізувати процеси обробки даних, зокрема пряму та зворотну обробку, тоді як при обробці в режимі реального часу будь-яке переривання або несумісність поправок та їх передачі призведе до зниження точності позиціонування.
Першою ключовою перевагою GNSS (PPK) порівняно з обробкою в режимі реального часу (RTK) є те, що система, яка використовується в польових умовах, не потребує каналу передачі даних або радіозв’язку для передачі поправок RTCM, що надходять із мережі CORS, до GNSS .
Головним обмеженням для впровадження пост-обробки є необхідність того, щоб кінцева програма впливала на навколишнє середовище. З іншого боку, якщо ваша програма може витримати додатковий час обробки, необхідний для отримання оптимізованої траєкторії, це значно покращить якість даних для всіх ваших кінцевих результатів.
