


Ekinox-D 듀얼-안테나를 갖춘 소형 INS GNSS 솔루션
Ekinox-D는 공간이 중요한 애플리케이션에 이상적인 통합 RTK GNSS 수신기를 갖춘 올인원 관성 항법 시스템입니다. 이 고급 INS/GNSS는 하나 또는 두 개의 안테나와 함께 제공되며 GNSS 중단 중에도 자세, Heave 및 센티미터 수준의 위치를 제공합니다.
IMU는 이 관성 항법 시스템의 핵심 구성 요소입니다. MEMS 기술과 혁신적인 독점 통합을 활용하여 Ekinox-D IMU는 합리적인 비용을 유지하면서 탁월한 성능을 제공합니다. 또한 DVL 또는 주행 거리계는 Ekinox-D에 속도 보조 입력으로 연결할 수 있습니다.
모든 Ekinox-D 기능과 애플리케이션을 알아보십시오.
Ekinox-D 기능
Ekinox-D는 SBAS, DGNSS 및 RTK 측위가 가능한 측량 등급 GNSS 수신기(L1/L2/L5 GPS, GLONASS, GALILEO, BEIDOU)를 내장하고 있습니다. 5Hz의 구성된 새로 고침 속도로, 이 수신기는 다중 경로 상황 또는 Inmarsat / Iridium 재밍을 감지하고 제거하는 매우 고급 자동 완화 알고리즘 덕분에 혹독한 GNSS 환경에서 최고의 정확성과 신뢰성을 제공합니다.
RTK 측위 기능과 함께 실시간 또는 후처리에서 센티미터 정밀도를 위한 RAW 데이터 지원을 기본으로 제공합니다. 듀얼 안테나는 낮은 동적 애플리케이션에서 정밀한 방위를 가능하게 합니다.
내부 듀얼 L-Band 복조기는 Fugro Marinestar™ PPP 서비스를 지원하여 전 세계적으로 특정 인프라 없이 10cm 미만의 측위 정확도를 제공합니다.
Ekinox-D 사양에 대한 자세한 정보를 확인하십시오.




사양
모션 & 내비게이션 성능
1.2 m 단일 지점 수직 위치
1.2 m RTK 수평 위치
0.01 m + 0.5 ppm RTK 수직 위치
0.015 m + 1 ppm PPK 수평 위치
0.01 m + 0.5 ppm * PPK 수직 위치
0.015 m + 1 ppm * 단일 지점 롤/피치
0.02 ° RTK 롤/피치
0.015 ° PPK 롤/피치
0.01 ° * 단일 지점 헤딩
0.05 ° RTK 헤딩
0.04 ° PPK 방위각
0.03 ° *
항법 기능
단일 및 이중 GNSS 안테나 실시간 Heave 정확도
5 cm 또는 너울의 5 % 실시간 Heave 파동 주기
0 ~ 20초 실시간 Heave 모드
자동 조정 지연된 heave 정확도
2 cm 또는 2 % 지연된 Heave 파동 주기
0 ~ 40초
모션 프로파일
수상 선박, 수중 차량, 해양 매핑, 해양 및 열악한 해양 환경 항공
항공기, 헬리콥터, UAV 육지
자동차, 기차/철도, 트럭, 이륜차, 중장비, 보행자, 배낭, 오프로드
GNSS 성능
내부 측지 이중 안테나 주파수 대역
이중 주파수 GNSS 기능
SBAS, SP, RTK, PPK GPS 신호
L1, L2, L5, L6 * Galileo 신호
E1, E5a, E5b Glonass 신호
L1 C/A, L2 C/A, L2P, L3 Beidou 신호
B1I, B1C, B2a, B2I, B3I 기타 신호
Marinestar, CLAS, QZSS, Navic, L-Band * GNSS 최초 위치 결정 시간
< 45 s Jamming 및 스푸핑
고급 완화 및 지표, OSNMA
환경 사양 및 작동 범위
IP-68 작동 온도
-40 °C ~ 75 °C 진동
3 g RMS – 20Hz ~ 2kHz 충격
0.3 ms 동안 500 g MTBF (계산)
50,000 시간 다음과 호환
MIL-STD-810, EN60945
인터페이스
GNSS, RTCM, 주행 거리계, DVL Output 프로토콜
NMEA, Binary sbgECom, TSS, Simrad, Dolog 입력 프로토콜
NMEA, Trimble, Novatel, Septentrio, Hemisphere, DVL (PD0, PD6, Teledyne, Nortel) 데이터 로거
8 GB 또는 48시간 @ 200 Hz Output 속도
최대 200Hz Ethernet
전이중(10/100 base-T), PTP 마스터 클럭, NTP, 웹 인터페이스, FTP, REST API 직렬 포트
RS-232/422 최대 921kbps: 3개의 출력 / 5개의 입력 CAN
1x CAN 2.0 A/B, 최대 1 Mbps Sync OUT
PPS, 최대 200Hz 트리거, 가상 오도미터 – 2개 출력 Sync IN
PPS, 주행 거리계, 최대 1 kHz 이벤트 마커 – 5개 입력
기계 및 전기 사양
9 ~ 36 VDC 전력 소비
6 W 안테나 전력
5 VDC – 안테나당 최대 150 mA | 게인: 17 – 50 dB 무게 (g)
600 g 크기 (LxWxH)
100 mm x 86 mm x 75 mm
타이밍 사양
< 200 ns PTP 정확도
< 1 µs PPS 정확도
< 1 µs (jitter < 1 µs) 데드 레커닝 시 드리프트
1 ppm

Ekinox-D 애플리케이션
Ekinox-D는 육상, 해상, 수중 및 항공 애플리케이션 전반에 걸쳐 고정밀 항법 및 실시간 모니터링을 위해 설계되었으며, 가장 까다로운 조건에서도 정확한 데이터를 보장합니다.
육상 애플리케이션에서는 모바일 매핑, 자율 주행 차량 및 전술 작전을 위한 신뢰할 수 있는 위치 및 자세를 제공합니다. 해상 및 수중 프로젝트의 경우, 안전하고 효율적인 운영에 필수적인 견고한 항법 및 선박 유도를 지원합니다. 항공 애플리케이션에서는 당사의 INS가 UAV 및 유인 항공기의 안정성과 정밀도를 향상시킵니다. 실시간 성능 모니터링을 통해 당사의 INS는 다양한 환경에서 정확하고 실행 가능한 통찰력을 보장합니다.
다양한 분야의 모든 애플리케이션을 살펴보십시오.
Ekinox-D 데이터시트
모든 센서 기능 및 사양을 받은 편지함으로 바로 받아보십시오!
Ekinox-D와 다른 제품 비교
내비게이션, 모션 및 Heave 감지를 위한 가장 진보된 관성 범위의 센서를 비교해 보십시오.
전체 사양은 요청 시 제공되는 하드웨어 설명서에서 확인할 수 있습니다.
-

Ekinox-D
- RTK 수평 위치
- 0.01 m + 0.5 ppm
- RTK 롤/피치
- 0.015 °
- RTK 헤딩
- 0.04 °
- GNSS 수신기
- 내부 측지 이중 안테나
- 무게 (g)
- 600 g
- 크기 (LxWxH)
- 100 × 86 × 75 mm
-
- RTK 수평 위치
- 0.01 m + 1 ppm
- RTK 롤/피치
- 0.05 °
- RTK 헤딩
- 0.2 °
- GNSS 수신기
- 내부 이중 안테나
- 무게 (g)
- 65 g
- 크기 (LxWxH)
- 46 × 45 × 32 mm
-
- RTK 수평 위치
- 0.01 m + 0.5 ppm
- RTK 롤/피치
- 0.015 °
- RTK 헤딩
- 0.05 °
- GNSS 수신기
- 내부 이중 안테나
- 무게 (g)
- 165 g
- 크기 (LxWxH)
- 42 × 57 × 60 mm
-
- RTK 수평 위치
- 0.015 m + 1 ppm
- RTK 롤/피치
- 0.015 °
- RTK 헤딩
- 0.05 °
- GNSS 수신기
- 내부 이중 안테나
- 무게 (g)
- 38 g
- 크기 (LxWxH)
- 50 × 37 × 23 mm



Ekinox-D 호환성
문서 및 자료
Ekinox-D는 모든 단계에서 사용자를 지원하도록 설계된 포괄적인 문서와 함께 제공됩니다.
설치 가이드에서 고급 구성 및 문제 해결에 이르기까지 명확하고 자세한 설명서는 원활한 통합 및 작동을 보장합니다.
SBG Systems의 사례 연구
당사의 INS가 어떻게 성능을 향상시키고, 다운타임을 줄이며, 운영 효율성을 개선하는지 보여주는 실제 사용 사례를 살펴보십시오. 당사의 고급 센서와 직관적인 인터페이스가 귀하의 애플리케이션에서 탁월한 성과를 내는 데 필요한 정밀도와 제어 기능을 어떻게 제공하는지 알아보십시오.





추가 제품 및 액세서리
다양한 애플리케이션을 통해 SBG Systems의 솔루션이 어떻게 운영 방식을 혁신할 수 있는지 살펴보십시오. SBG Systems의 모션 및 내비게이션 센서와 소프트웨어를 통해 해당 분야의 성공과 혁신을 주도하는 최첨단 기술을 활용할 수 있습니다.
다양한 산업 분야에서 관성 내비게이션 및 포지셔닝 솔루션의 잠재력을 활용하는 데 동참하십시오.
Qinertia GNSS-INS

케이블

당사의 생산 과정
모든 SBG Systems 제품의 정밀성과 전문성을 확인하십시오. 다음 비디오는 고성능 관성 항법 시스템을 세심하게 설계, 제조 및 테스트하는 방법에 대한 내부 정보를 제공합니다.
고급 엔지니어링에서 엄격한 품질 관리에 이르기까지 당사의 생산 프로세스는 각 제품이 최고 수준의 신뢰성과 정확성을 충족하는지 확인합니다.
자세한 내용을 보려면 지금 시청하십시오!

견적 문의
그들은 우리에 대해 이야기합니다.
SBG Systems 제품을 활용한 업계 전문가 및 고객의 경험과 사용 후기를 소개합니다. SBG Systems의 혁신적인 기술이 어떻게 운영 방식을 바꾸고 생산성을 향상했으며 다양한 애플리케이션에서 신뢰할 수 있는 결과를 제공하는지 확인해 보십시오.
FAQ 섹션
FAQ 섹션에 오신 것을 환영합니다. 이 섹션에서는 SBG Systems의 최첨단 기술 및 애플리케이션에 대한 가장 중요한 질문을 다룹니다. 여기에서 제품 기능, 설치 프로세스, 문제 해결 팁 및 사용 경험을 극대화하기 위한 모범 사례에 대한 포괄적인 답변을 찾을 수 있습니다.
여기에서 답변을 찾아보십시오!
서지(Surge), 스웨이(Sway), 히브(Heave)란 무엇입니까?
서지(Surge), 스웨이(Sway) 및 히브(Heave)는 선박 또는 플랫폼이 해양에서 움직이는 방식을 설명하는 세 가지 병진 운동입니다. 이는 피치(Pitch), 롤(Roll) 및 요(Yaw)(회전 운동)를 포함하는 6개의 자유도(DOF) 운동의 일부입니다.
- 서지(Surge)는 선박의 종축을 따라 선형 운동(앞뒤)입니다. 예를 들어, 파도 또는 추진력으로 인해 선박이 가속 또는 감속될 때 서지(Surge)가 발생합니다.
- 스웨이(Sway)는 횡축을 따라 선형 운동(좌우)입니다. 이는 선박이 측면에서 접근하는 해류, 바람 또는 파도로 인해 옆으로 표류할 때 발생합니다.
- 히브(Heave)는 수직축을 따라 선형 운동(위아래)입니다. 이는 주로 파도가 선박을 들어 올리고 내림으로써 발생합니다.
함께 서지(Surge), 스웨이(Sway) 및 히브(Heave)는 3차원 공간에서 선박의 병진 변위를 정의합니다. 이러한 움직임은 안정성, 정확성 및 안전에 직접적인 영향을 미치기 때문에 항해, 해양 시추, 동적 위치 결정 및 해양 측량에서 매우 중요합니다.
수심 측량이란 무엇입니까?
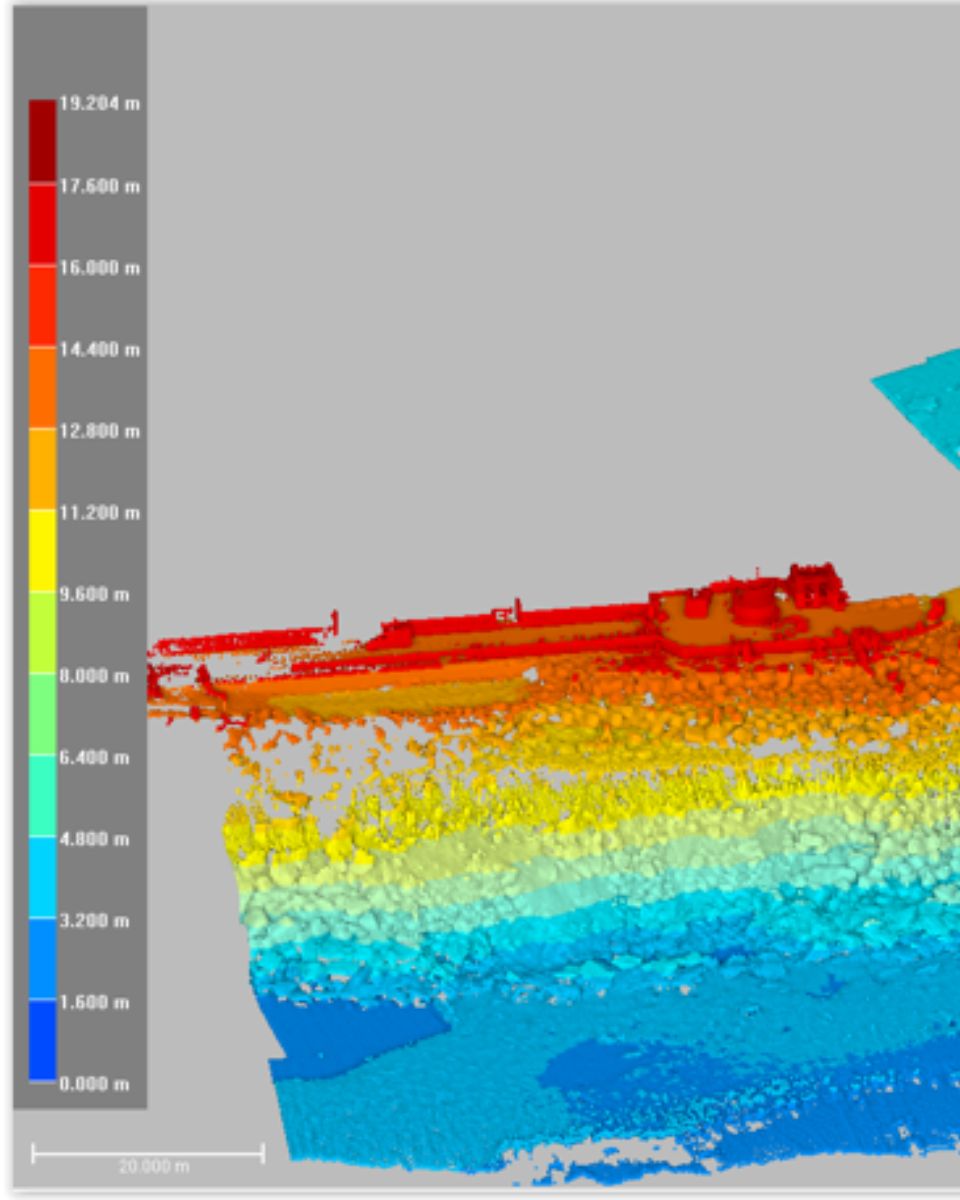
수심 측량은 수중 지형의 깊이와 형태를 연구하고 측정하는 것으로, 주로 해저 및 기타 수중 지형을 매핑하는 데 중점을 둡니다. 이는 지형의 수중 버전으로, 바다, 해, 호수 및 강의 수중 특징에 대한 자세한 통찰력을 제공합니다. 수심 측량은 항해, 해양 건설, 자원 탐사 및 환경 연구를 포함한 다양한 응용 분야에서 중요한 역할을 합니다.
최신 수심 측량 기술은 수심을 측정하기 위해 음파를 사용하는 단일 빔 및 다중 빔 음향 측심기와 같은 소나 시스템에 의존합니다. 이 장치들은 해저를 향해 음향 Pulse를 보내고 반향이 돌아오는 데 걸리는 시간을 기록하며, 수중 음속을 기반으로 수심을 계산합니다. 특히 다중 빔 음향 측심기는 넓은 해저 영역을 한 번에 매핑할 수 있게 하여 매우 상세하고 정확한 해저 표현을 제공합니다. 종종 RTK + INS 솔루션이 해저의 정확한 위치를 가진 3D 수심 측량 표현을 생성하는 데 사용됩니다.
수심 데이터는 해저 암초, 난파선, 모래톱과 같이 잠재적인 수중 위험 요소를 식별하여 선박이 안전하게 항해하도록 돕는 해도 제작에 필수적입니다. 또한 과학 연구에서 연구자들이 수중 지질학적 특징, 해류 및 해양 생태계를 이해하는 데 중요한 역할을 합니다.
수로 매핑이란 무엇입니까?
수로 매핑은 해양, 강, 호수 및 연안 지역을 포함한 수역의 물리적 특징을 측정하고 매핑하는 프로세스입니다. 여기에는 해저의 깊이, 모양 및 윤곽(해저 매핑)과 수중 물체, 항해 위험 요소 및 기타 수중 특징(예: 해저 도랑)의 위치와 관련된 데이터 수집이 포함됩니다. 수로 매핑은 항해 안전, 연안 관리 및 연안 매핑, 건설 및 환경 모니터링을 포함한 다양한 응용 분야에 매우 중요합니다.
수로 측량은 수심을 측정하고 해저 지형을 파악하기 위해 음파를 해저로 보내고 반향 시간을 측정하는 단일 빔 또는 멀티 빔 음향 측심기와 같은 소나 시스템을 사용하는 수심 측량으로 시작하여 몇 가지 주요 구성 요소를 포함합니다.
정확한 위치 결정은 매우 중요하며, 수심 측정값을 정밀한 지리적 좌표와 연결하기 위해 GNSS(Global Navigation Satellite Systems) 및 INS(Inertial Navigation Systems)를 사용하여 달성됩니다. 또한, 수온, 염분, 해류와 같은 수층 데이터가 측정되며, 측면 스캔 소나 및 자력계와 같은 도구를 사용하여 수중 물체, 장애물 또는 위험을 탐지하기 위한 지구물리학적 데이터가 수집됩니다.
멀티빔 음향 측심이란 무엇입니까?
MBES(Multibeam Echo Sounding)는 해저 및 수중 지형지물을 매우 정밀하게 매핑하는 데 사용되는 고급 수로 매핑 기술입니다.
일반적인 단일 빔 음향 측심기가 선박 바로 아래 한 지점에서 깊이를 측정하는 것과 달리, MBES는 여러 개의 소나 빔을 사용하여 해저의 넓은 영역에서 동시에 깊이 측정을 캡처합니다. 이를 통해 지형, 지질학적 특징 및 잠재적 위험 요소를 포함한 수중 지형을 상세하고 고해상도로 매핑할 수 있습니다.
MBES 시스템은 물을 통과하여 해저에서 반사되어 선박으로 돌아오는 음파를 방출합니다. 반향이 돌아오는 데 걸리는 시간을 분석하여 시스템은 여러 지점에서 깊이를 계산하여 수중 지형의 포괄적인 지도를 생성합니다.
이 기술은 항해, 해양 건설, 환경 모니터링 및 자원 탐사를 포함한 다양한 응용 분야에 필수적이며 안전한 해상 운영과 해양 자원의 지속 가능한 관리를 위한 중요한 데이터를 제공합니다.
