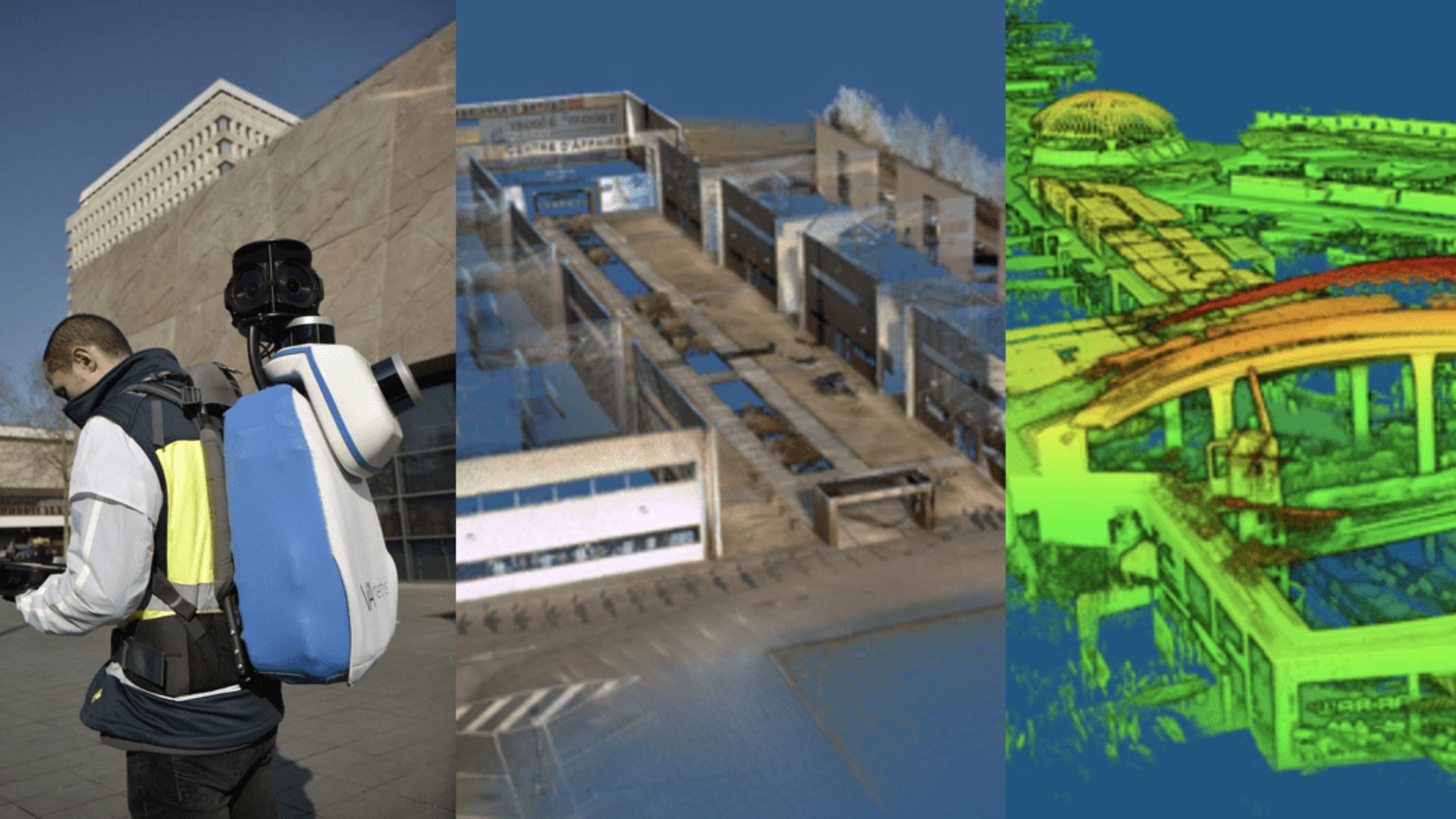
Mapowanie w pomieszczeniach z plecakiem
Ellipse-D RTK INS wspomaga obliczenia SLAM, synchronizuje LiDAR i kamerę.
“Od lat współpracujemy z SBG Systems, w szczególności z serią Ellipse. Zawsze polegaliśmy na tych solidnych czujnikach inercyjnych.” | Jérôme N., Założyciel VIAMETRIS
Mobilny system skanowania oparty na plecaku
System bMS3D-360 został zaprojektowana do pracy w najtrudniejszych warunkach. Zawiera dwa sensory Velodyne LiDAR, kamerę 360 Lady-bug, system inercyjny Ellipse-D SBG z wewnętrznym odbiornikiem GNSS L1/L2 oraz komputer.
Przyspieszenie pracy 7-krotne
Przebieg pracy jest prosty. Specjalista pomiarowy uruchamia system, sprawdza na tablecie, czy dane GNSS i inercyjne są obliczane, i rozpoczyna pomiar.
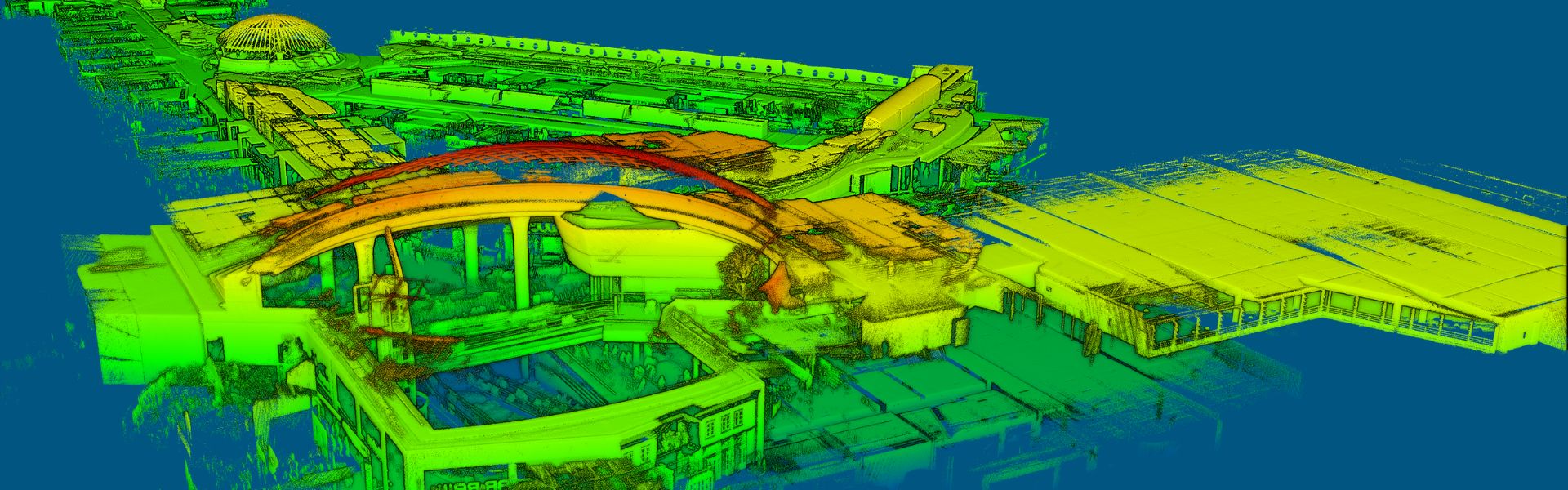
Po powrocie do biura użytkownik uruchamia oprogramowanie do post-processingu INS/GNSS, aby zwiększyć dokładność orientacji i pozycji, a następnie używa oprogramowania VIAMETRIS do georeferencji i kolorowania chmury punktów.
Zebrane dane są gotowe do importu do najpopularniejszych programów projektowych. Ten proces jest 7-krotnie szybszy w porównaniu z tradycyjną metodą.
Brak brakujących danych; chmura punktów może być wykorzystana do dalszych pomiarów, co oznacza oszczędność czasu i kosztów podróży.
Oprócz sprawdzonej wydajności bMS3D-360, pewne szczegóły wyróżniają go na rynku, takie jak kamera 360 znajdująca się na wysuwanym maszcie, zapewniająca większe pole widzenia po rozłożeniu i większe bezpieczeństwo po złożeniu (niektóre dachy mogą być bardzo niskie, na przykład na parkingach).
Jest to jedyny plecak oferujący taką kamerę, co znacznie upraszcza pracę związaną z obróbką danych. Podczas nawigacji w chmurze punktów użytkownik otwiera unikalny obraz otoczenia zeskanowanego w 360°, zamiast przeglądać 4 różne punkty widzenia kamery.
Gdy GNSS napotyka źródła zakłóceń, INS podtrzymuje trajektorię, podczas gdy technologia SLAM jest ograniczona.
RTK INS wspomagający obliczenia SLAM
Ellipse to bardzo kompaktowy system nawigacji inercyjnej integrujący odbiornik GNSS L1/L2. Ten INS klasy przemysłowej oblicza roll, pitch, heading, a także pozycję dzięki wbudowanemu rozszerzonemu filtrowaniu Kalmana.
W czasie rzeczywistym dane orientacyjne Ellipse są wykorzystywane do korygowania położenia sprzętu i wspomagania obliczonego heading SLAM.
Rzeczywiście, jeśli heading oparty na SLAM jest dostarczany z częstotliwością 20 Hz, heading oparty na inercji jest dostarczany z częstotliwością 200 Hz. Pomiędzy dwoma informacjami SLAM, INS utrzymuje stabilny heading.
Odbiornik GNSS zapewnia absolutne pozycjonowanie chmury punktów i dodaje ograniczenie wysokości. Co więcej, gdy zakłócenia wpływają na GNSS, INS utrzymuje trajektorię tam, gdzie technologia SLAM zawodzi. Na przykład na parkingach bez pobliskich obiektów do pomiaru LiDAR, INS zapewnia dokładną nawigację.
Jérôme Ninot, założyciel VIAMETRIS wyjaśnia ten wybór: "Od lat współpracujemy z SBG Systems , a w szczególności z serią Ellipse . Zawsze polegaliśmy na tych solidnych czujnikach inercyjnych, więc kiedy przyszło do wyboru systemu GNSS do naszego plecaka, byliśmy zadowoleni, że Ellipse już integruje odbiornik GNSS ".
Jak twierdzi Jérôme, rezygnacja z integracji dodatkowego sprzętu to zawsze strata czasu.

Ellipse-D
Ellipse-D to inercjalny system nawigacyjny integrujący podwójną antenę i dwuczęstotliwościowy RTK GNSS, który jest kompatybilny z naszym oprogramowaniem do post-processingu Qinertia.
Zaprojektowana z myślą o robotyce i zastosowaniach geodezyjnych, może łączyć dane z licznika impulsów (Pulse) lub CAN OBDII w celu zwiększenia dokładności nawigacji inercyjnej.

Zapytaj o wycenę Ellipse-D
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Co to jest GNSS a GPS?
GNSS oznacza Globalny System Nawigacji Satelitarnej, a GPS Globalny System Pozycjonowania. Terminy te są często używane zamiennie, ale odnoszą się do różnych koncepcji w ramach satelitarnych systemów nawigacyjnych.
GNSS to zbiorcze określenie wszystkich satelitarnych systemów nawigacyjnych, natomiast GPS odnosi się konkretnie do systemu amerykańskiego. Obejmuje wiele systemów, które zapewniają bardziej kompleksowy zasięg globalny, podczas gdy GPS jest tylko jednym z tych systemów.
Dzięki integracji danych z wielu systemów uzyskujesz lepszą dokładność i niezawodność dzięki GNSS, podczas gdy sam GPS może mieć ograniczenia w zależności od dostępności satelitów i warunków środowiskowych.
Jaka jest różnica między AHRS a INS?
Główna różnica między Attitude and Heading Reference System (AHRS) a Inertial Navigation System (INS) polega na ich funkcjonalności i zakresie dostarczanych danych.
AHRS dostarcza informacji o orientacji — w szczególności o położeniu (pitch, roll) i kierunku (yaw) pojazdu lub urządzenia. Zazwyczaj wykorzystuje kombinację czujników, w tym żyroskopy, akcelerometry i magnetometry, do obliczania i stabilizacji orientacji. AHRS podaje pozycję kątową w trzech osiach (pitch, roll i yaw), umożliwiając systemowi zrozumienie jego orientacji w przestrzeni. Jest często stosowany w lotnictwie, UAV, robotyce i systemach morskich w celu zapewnienia dokładnych danych o położeniu i kierunku, co ma kluczowe znaczenie dla kontroli i stabilizacji pojazdu.
INS nie tylko dostarcza dane o orientacji (jak AHRS), ale także śledzi pozycję, prędkość i przyspieszenie pojazdu w czasie. Wykorzystuje czujniki inercyjne do szacowania ruchu w przestrzeni 3D bez polegania na zewnętrznych odniesieniach, takich jak GNSS. Łączy czujniki znajdujące się w AHRS (żyroskopy, akcelerometry), ale może również zawierać bardziej zaawansowane algorytmy do śledzenia pozycji i prędkości, często integrując się z danymi zewnętrznymi, takimi jak GNSS, dla zwiększenia dokładności.
Podsumowując, AHRS koncentruje się na orientacji (pozycji i heading), podczas gdy INS dostarcza pełny zestaw danych nawigacyjnych, w tym pozycję, prędkość i orientację.
Jaka jest różnica między IMU a INS?
Różnica między inercyjnym zespołem pomiarowym (IMU) a inercyjnym systemem nawigacyjnym (INS) polega na ich funkcjonalności i złożoności.
IMU inercyjny moduł pomiarowy) dostarcza surowe dane dotyczące przyspieszenia liniowego i prędkości kątowej pojazdu, mierzone za pomocą akcelerometrów i żyroskopów. Dostarcza informacji o przechyłach, pochyleniach, odchyleniach i ruchu, ale nie oblicza danych dotyczących pozycji ani nawigacji. IMU specjalnie zaprojektowana przekazywania niezbędnych danych o ruchu i orientacji do zewnętrznego przetwarzania w celu określenia pozycji lub prędkości.
Z drugiej strony, INS inercyjny system nawigacyjny) łączy IMU z zaawansowanymi algorytmami w celu obliczenia pozycji, prędkości i orientacji pojazdu w czasie. Wykorzystuje algorytmy nawigacyjne, takie jak filtrowanie Kalmana, do fuzji i integracji danych z czujników. INS dane nawigacyjne w czasie rzeczywistym, w tym pozycję, prędkość i orientację, bez konieczności polegania na zewnętrznych systemach pozycjonowania, takich jak GNSS.
Ten system nawigacyjny jest zazwyczaj wykorzystywany w zastosowaniach wymagających kompleksowych rozwiązań nawigacyjnych, szczególnie w środowiskach GNSS, takich jak wojskowe bezzałogowe statki powietrzne (UAV), statki i okręty podwodne.
Jak mogę połączyć systemy inercyjne z LIDAR-em do mapowania dronem?
Połączenie systemów inercyjnych SBG Systems z LiDAR-em do mapowania dronowego zwiększa dokładność i niezawodność w pozyskiwaniu precyzyjnych danych geoprzestrzennych.
Oto jak działa integracja i jakie korzyści przynosi mapowaniu z wykorzystaniem dronów:
- Metoda teledetekcji wykorzystująca impulsy laserowe do pomiaru odległości od powierzchni Ziemi, tworząca szczegółową mapę 3D terenu lub struktur.
- Systemy INS SBG Systems łączą inercyjną jednostkę pomiarową (IMU) z danymi GNSS, aby zapewnić dokładne pozycjonowanie, orientację (pitch, roll, yaw) i prędkość, nawet w środowiskach pozbawionych sygnału GNSS.
System inercyjny SBG jest zsynchronizowany z danymi LiDAR. INS dokładnie śledzi pozycję i orientację drona, podczas gdy LiDAR rejestruje szczegóły terenu lub obiektu poniżej.
Dzięki znajomości dokładnej orientacji drona, dane LiDAR mogą być precyzyjnie umieszczone w przestrzeni 3D.
Komponent GNSS zapewnia globalne pozycjonowanie, natomiast IMU oferuje dane o orientacji i ruchu w czasie rzeczywistym. Takie połączenie zapewnia, że nawet gdy sygnał GNSS jest słaby lub niedostępny (np. w pobliżu wysokich budynków lub gęstych lasów), INS może kontynuować śledzenie ścieżki i pozycji drona, umożliwiając spójne mapowanie LiDAR.
Co oznacza jednoczesna lokalizacja i mapowanie?
Simultaneous Localization and Mapping (SLAM) to technika obliczeniowa, która umożliwia robotowi, pojazdowi lub urządzeniu tworzenie mapy nieznanego środowiska, jednocześnie określając własną pozycję w tej mapie.
Łączy dane z różnych czujników (np. kamer, LiDAR-u, radaru, IMU, GNSS) z algorytmami takimi jak filtrowanie lub optymalizacja, w celu uzyskania mapowania i nawigacji w czasie rzeczywistym.
SLAM umożliwia systemom autonomicznym nawigowanie i rozumienie otoczenia bez wcześniejszych map lub GPS.
