Mejorar la navegación de los coches autónomos
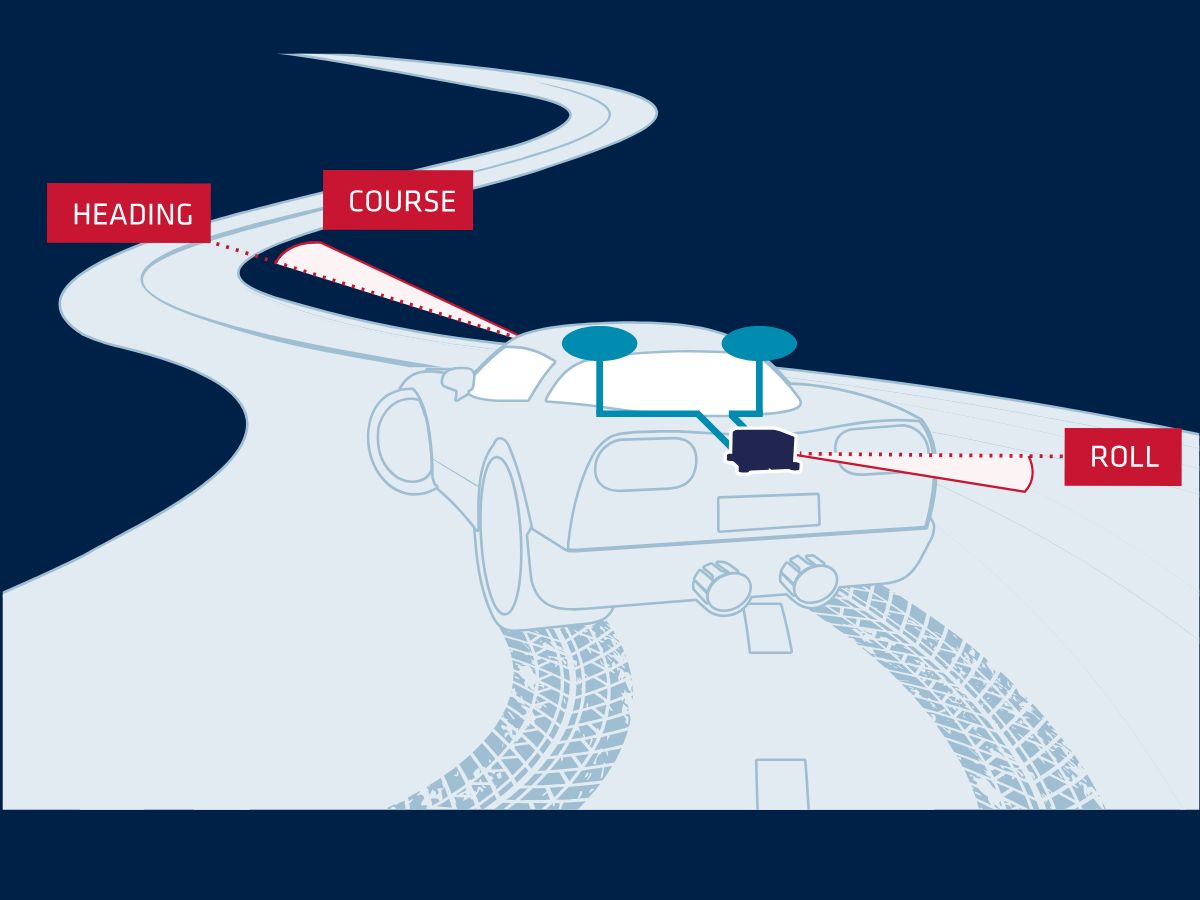
Nuestros sistemas de navegación inercial (INS) proporcionan balanceo (roll), cabeceo (pitch) y rumbo (heading) en tiempo real, integrados con un receptor GNSS para mantener la precisión en caso de cortes de señal (edificios, árboles, túnel, etc.).
Los sensores inerciales también se utilizan para sincronizar y estabilizar con precisión equipos adicionales como LiDAR o una cámara para una aplicación de coche sin conductor. La integración de un INS con otros sensores ayuda a crear una comprensión global del entorno del vehículo, permitiéndole navegar por escenarios complejos y dinámicos con mayor precisión.

Mejorar la seguridad y fiabilidad de los vehículos autoconducidos
Uno de los entornos más difíciles para los coches autoconducidos son las zonas urbanas, donde las señales GNSS pueden verse obstruidas por edificios altos y las condiciones del tráfico pueden cambiar rápidamente. INS proporciona la precisión y fiabilidad necesarias para navegar con seguridad en estos entornos.
Nuestros sensores INS utilizan tecnología de sistemas microelectromecánicos (MEMS). Esto permite utilizar sensores más pequeños, precisos y eficientes desde el punto de vista energético, lo que mejora el rendimiento general INS en los coches autónomos.
Sistemas de navegación inercial para coches autónomos
Nuestros sistemas de navegación inercial están diseñados para proporcionar la precisión y fiabilidad inigualables necesarias para navegar con confianza por entornos complejos, como cañones urbanos.
Hemos creado soluciones INS avanzadas que se integran a la perfección con los sistemas de su vehículo autónomo, proporcionando datos en tiempo real que garantizan un posicionamiento preciso y un control suave y exacto. Desde calles urbanas hasta terrenos difíciles, dotamos a su tecnología de vehículo autónomo de las capacidades de navegación sólidas y de alto rendimiento necesarias para lograr un funcionamiento autónomo seguro, fiable y eficiente.

Nuestras soluciones para coches autónomos
Conduzca el futuro de la movilidad autónoma con nosotros, donde la innovación se une a la precisión y cada trayecto se guía con una precisión sin igual. Descubre nuestras soluciones de navegación para coches autónomos.

Ellipse-D

Ekinox Micro

Ekinox-D
Folleto sobre aplicaciones autónomas
Reciba nuestro folleto directamente en su buzón de correo electrónico.
Casos prácticos
Descubra cómo nuestra tecnología inercial está cambiando el panorama de los vehículos autoconducidos en nuestra sección de casos prácticos. Estos ejemplos reales demuestran cómo nuestros sensores avanzados permiten una navegación precisa y un rendimiento robusto, incluso en las condiciones más exigentes.
Ya sea mejorando la seguridad en entornos urbanos complejos o garantizando una funcionalidad óptima cuando no hay señales GNSS disponibles, nuestras soluciones potencian los coches autoconducidos con una precisión y un control superiores.



Hablan de nosotros
Escuche de primera mano a los innovadores y clientes que han adoptado nuestra tecnología.
Sus testimonios e historias de éxito ilustran el importante impacto que tienen nuestros sensores en las aplicaciones prácticas de los vehículos autónomos.
Explorar otras posibles aplicaciones de los vehículos autónomos
Los vehículos autónomos están transformando sectores que van mucho más allá del transporte. Desde la agricultura y la logística hasta la construcción y la vigilancia, las tecnologías de navegación avanzadas están permitiendo operaciones más inteligentes, seguras y eficientes. Explore la amplia gama de aplicaciones innovadoras impulsadas por la autonomía.
¿Tiene alguna pregunta?
Encuentre respuestas a las preguntas más frecuentes sobre las aplicaciones que presentamos. Si no encuentra lo que busca, no dude en contacto con nosotros directamente.
¿Cómo funcionan los coches autónomos?
Los coches de conducción autónoma son vehículos equipados con sofisticados sistemas que les permiten navegar y controlarse a sí mismos sin intervención humana. Estos vehículos utilizan una combinación de sensores y algoritmos de conducción autónoma para percibir su entorno, tomar decisiones y realizar tareas de autoconducción. El objetivo es lograr una autonomía total, en la que el vehículo pueda ocuparse de todos los aspectos de la conducción de forma segura y eficiente.
Los coches autónomos se basan en una serie de tecnologías clave para percibir su entorno. Entre ellas:
- GNSS (Sistema Global de Navegación por Satélite): para obtener información actualizada en tiempo real sobre la posición, velocidad y dirección del coche autoconducido.
- INS (sistemas de navegación inercial): para mantener la precisión en caso de cortes de la señal GNSS. Proporciona actualizaciones en tiempo real de la posición, velocidad y dirección del coche autoconducido.
- LiDAR (Light Detection and Ranging): uso de rayos láser para crear un mapa 3D detallado del entorno del vehículo. Esta tecnología ayuda al coche a detectar y medir objetos a su alrededor, incluidos otros vehículos, peatones y señales de tráfico.
- Radar (Radio Detection and Ranging): uso de ondas de radio para detectar la velocidad, distancia y dirección de los objetos. El radar es especialmente útil en condiciones meteorológicas adversas y para detectar objetos a mayor distancia.
- Cámaras: para captar información visual sobre el entorno del vehículo, incluidas las marcas de los carriles, los semáforos y las señales de tráfico. Son esenciales para interpretar señales visuales complejas y tomar decisiones basadas en datos visuales.
¿Cuál es la diferencia entre ADAS en los coches y los coches autoconducidos?
Los ADAS (Sistemas Avanzados de Asistencia al Conductor) mejoran la seguridad de la conducción con funciones como el mantenimiento del carril, el control de crucero adaptativo y el frenado automático, pero requieren la supervisión activa del conductor. En cambio, los coches autoconducidos, equipados con sistemas de conducción autónoma, pretenden automatizar por completo el funcionamiento del vehículo sin intervención humana.
Mientras que los ADAS ayudan a los conductores asistiéndoles en sus tareas y mejorando la seguridad, los coches de conducción autónoma están diseñados para gestionar todos los aspectos de la conducción autónoma, desde la navegación hasta la toma de decisiones, ofreciendo un mayor nivel de automatización (niveles SAE) y comodidad. Las características o prestaciones ADAS se atribuyen a niveles SAE inferiores a 3 y los coches de autoconducción como tales corresponden al nivel mínimo 4.