厳粛な使命のためにデジタル化されたアメリカの軍人墓地
“Ellipse-Dを選んだのは、GNSSと慣性ソリューションがオールインワンで、コンパクトかつ低消費電力のデバイスにパッケージングされているからです。” | 米国陸軍地理空間センター、軍事エンジニアリング&サーベイサポート科学者、マシュー・R・ステイリー
陸軍地理空間センター(AGC)は、アメリカの軍人墓地の訪問者が愛する人を見つけるのを支援するために、革新的な技術を応用しました。
従来のGPSサーベイ手法と3Dマッピングのデジタル化が統合され、このプロジェクトの収集部分のために特別に構築されたバックパックに取り付けられました。
収集されたデータのフロントエンドとして機能するWebインターフェースは、訪問者が親戚を見つけ、GISデータベースに保存されている増幅された情報にアクセスするための簡単なインターフェースを提供します。
厳粛なミッションのためのパイロットプロジェクト
アメリカ国立墓地で特定の墓石を探すには、管理者が広範囲にわたる時間のかかる記録調査を行う必要のある場合がよくあります。 訪問者が愛する人を簡単に見つけられるように、陸軍地理空間センター(AGC)は、アーリントン国立墓地(ANC)との協力により、コロザル(パナマ)とノルマンディー(フランス)の墓地を含むパイロットプロジェクトを完了しました。これらを合わせると、15,000以上の墓地があります。 この大規模なプロジェクトでは、従来の測量方法と最新の技術を組み合わせて、両方の墓地のバーチャルモデルを作成します。 このモデルには、基礎となる地形や各墓石または記念碑のGPS座標だけでなく、道路、歩道、樹木、縁石、側溝、記念碑、その他多くの人工構造物などの機能も含まれており、推定精度は10 cm(3.9インチ)です。 識別のために、各墓石の表と裏の地理的位置情報付きの写真がコレクションソリューションを完成させました。 収集されたデータは処理され、ENFIREラップトップに統合されました。これらの技術革新のおかげで、訪問者は墓地のデータにアクセスしたり、愛する人を検索したり、ANC Explorerプログラムを実行している施設のキオスクを使用して歴史的に重要な墓地を見つけたりできます。 バーチャル訪問者は、自宅のコンピューターまたはモバイルデバイスでプログラムを使用することで、同じ機能を利用できます。
バックパック型モバイルマッピング手法
米国陸軍地理空間センターの軍事工学および測量支援科学者であるマシュー R. ステイリーは、最大限の詳細さですべての墓地を地図化するために、バックパックベースのモバイルマッピングソリューションを開発しました。
この装置の採用により、収集時間を短縮し、管理しやすい形式でデータを提供することで、コストを最小限に抑えます。これは、ENFIREおよびGPS-Sと呼ばれる米国軍事測量サービスで使用されるツールを活用しています。
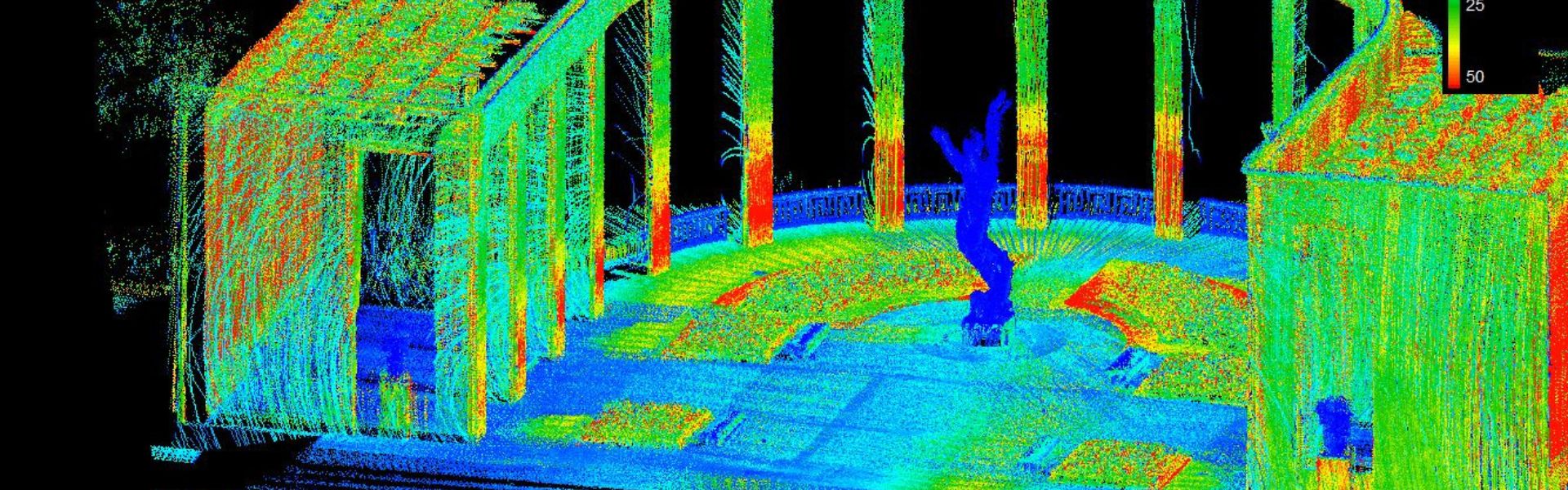
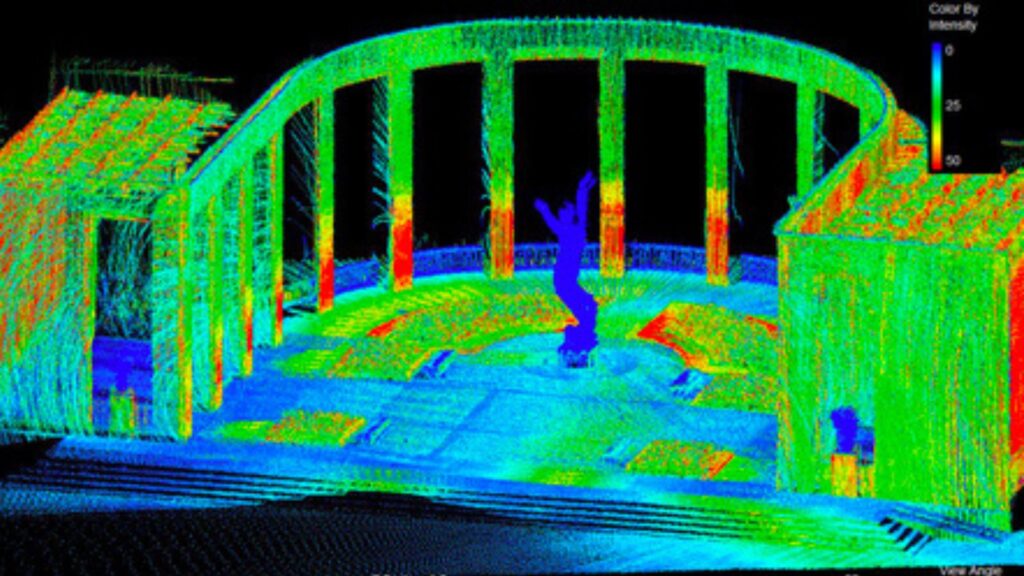
“VelodyneのLiDARと、SBG SystemsのRTK GPSが組み込まれたEllipse-D 慣性航法システム(INS)を組み合わせました”とマシュー R. ステイリーは説明します。
彼がEllipse-Dを選んだのは、コンパクトで低消費電力のデバイスに、GNSSと慣性ソリューションがオールインワンでパッケージングされているからです。
INS/GNSSは、モーション補正と点群のジオリファレンスを提供します。さらに、最高の精度を得るために、リアルタイムキネマティック(RTK)基地局が墓地に設置されました。また、Hypackソフトウェアは、生成された点群を効率的に管理しました。
偏角の調整
課題の一つは、設置場所の鉄分含有量に影響される磁力計の校正でした。磁気偏角の変化は場所によって異なるため、バックパックを米国からフランスへ輸送すると、磁気偏角が変化しました。
米国海洋大気庁 (NOAA) は、地球磁場の全球マップを5年ごとに更新しています。
このマップは、特定の場所と日付に基づいて、その場所の磁気偏角を特定するために利用できます。
SBG Systems は、このマップを慣性航法システムに組み込むことで、磁力計を使用しながら自動で真北方位を算出することを可能にしています。
樹木周辺のマッピング
もう1つの課題は、特定の種類の樹木の近くでの測量でした。これらの樹木は衛星受信に大きな影響を与えます。Staley 氏は、この問題に対処するためにデータ収集手順を修正し、植生から受信への影響をさらに軽減する方法について研究を続けています。
さらに、LiDAR の範囲を縮小して、より良い精度(全体で +/- 5 cm)を得ることが、ヨーのアーチファクトを軽減する方法として検討されます。
“SBG の Qinertia 後処理ソフトウェアをすぐにテストします。これにより、あらゆる条件で堅牢な精度を維持できる可能性があります”と、米軍のエンジニアは付け加えています。
Qinertia のような Post Processing Kinematic (PPK) ソフトウェアを使用すると、オフライン RTK 補正にアクセスでき、Forward-Backward-Merge と呼ばれる計算を使用して、慣性データを生の GNSS 観測値で後処理することにより、慣性航法システムのパフォーマンスが向上します。
最近リリースされた Qinertia ソフトウェアは、直感的で使いやすいように設計されており、市場で最速の後処理ソフトウェアとして独自に評価されています。
今後の展望
主な任務は、埋葬に関連するデータを収集し、ENFIRE、GPS-S、LiDARツールセットがアーリントン国立墓地の運用と管理に適用可能であることを確認することでした。
彼らは、収集したLiDARデータを使用して、敷地の監査、記録の更新、および建設の評価が可能であることを認識しました。
さらに、彼らはビジネスプロセスの効率を向上させる戦略計画を策定しました。
パイロットフェーズが終了した今、陸軍地理空間センターはアーリントン国立墓地およびアメリカ戦没者記念委員会と緊密に連携し、調査結果を評価し、将来の機能強化と革新のための戦略を決定しています。
初期の結果は、以前の取り組みと比較してコストが最小限に抑えられたことを証明しました。さらに、複数のコミュニティが全体として優れた投資収益率を達成しました。


Ellipse-D
Ellipse、デュアルアンテナおよびデュアル周波数RTKGNSS 統合した慣性航法システムGNSS 当社の後処理ソフトウェア「Qinertia」に対応しています。
ロボット工学および地理空間アプリケーション向けに設計されており、オドメーター Pulse OBDIIを融合させるGNSS 、推測航法の精度を向上させることができます。

Ellipse-D の見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も一般的な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
INSは外部支援センサーからの入力を受け入れますか?
当社の慣性航法システムは、空気データセンサー、磁力計、走行距離計、DVL 外部補助センサーからの入力を受け付けます。
この統合により、特にGNSSが利用できない環境において、INSは非常に汎用性が高く信頼性の高いものになります。
これらの外部センサーは、補完的なデータを提供することにより、INSの全体的なパフォーマンスと精度を向上させます。
AHRSとINSの違いは何ですか?
Attitude and Heading Reference System(AHRS)とInertial Navigation System(INS)の主な違いは、その機能と提供するデータの範囲にあります。
AHRS は、車両またはデバイスの姿勢(ピッチ、ロール)および方位(ヨー)に関する情報を提供します。通常、ジャイロスコープ、加速度計、磁力計などのセンサーの組み合わせを使用して、姿勢を計算および安定化します。AHRS は、3 軸(ピッチ、ロール、ヨー)の角度位置を出力し、システムが空間内での姿勢を理解できるようにします。航空、UAV、ロボット工学、および海洋システムで、正確な姿勢および方位データを提供するために使用されることが多く、これは車両の制御および安定化に不可欠です。
INSは、姿勢データ(AHRSなど)を提供するだけでなく、車両の位置、速度、および加速度を時間とともに追跡します。慣性センサーを使用して、GNSSのような外部参照に依存せずに、3D空間での動きを推定します。AHRS(ジャイロスコープ、加速度計)にあるセンサーを組み合わせますが、位置と速度の追跡のためのより高度なアルゴリズムも含まれる場合があり、多くの場合、精度を高めるためにGNSSのような外部データと統合されます。
要約すると、AHRSは向き(姿勢と方位)に焦点を当てていますが、INSは位置、速度、向きを含むナビゲーションデータの完全なスイートを提供します。
IMUとINSの違いは何ですか?
慣性計測ユニット(IMU)と慣性航法システム(INS)の違いは、その機能と複雑さにあります。
IMU 慣性計測装置)は、加速度計やジャイロスコープによって測定された、車両の直線加速度および角速度に関する生データを提供します。IMUは、ロール、ピッチ、ヨー、および運動に関する情報を提供しますが、位置や航法データを計算することはありません。IMU 、位置や速度を決定するための外部処理に向けて、運動や姿勢に関する必須データを中継するように特別にIMU 。
一方、INS 慣性航法システム)は IMU のデータと高度なアルゴリズムを組み合わせて、時間の経過に伴う車両の位置、速度、および姿勢を算出します。これには、センサーフュージョンや統合のためのカルマンフィルタリングなどのナビゲーションアルゴリズムが組み込まれています。INS 、GNSSのような外部測位システムに依存することなく、位置、速度、姿勢を含むリアルタイムのナビゲーションデータINS 。
このナビゲーションシステムは、特に軍事用UAV、船舶、潜水艦など、GNSS環境において、包括的なナビゲーションソリューションを必要とする用途で一般的に利用されています。
GNSS と GPS の違いとは?
GNSSはGlobal Navigation Satellite Systemの略であり、GPSはGlobal Positioning Systemの略です。これらの用語はしばしば混同して使用されますが、衛星測位システム内では異なる概念を指します。
GNSSは全ての衛星測位システムの総称であり、GPSは特に米国のシステムを指します。GNSSはより包括的なグローバルカバレッジを提供する複数のシステムを含みますが、GPSはそのシステムの一つに過ぎません。
GNSSを使用すると、複数のシステムからのデータを統合することで、精度と信頼性が向上します。GPS単独では、衛星の利用可能性や環境条件によっては制限がある場合があります。
