自動運転トラックを強化する Ellipse-D
独立したホイール駆動およびステアリングシステムを備えた自動運転トラック。
「SBG Systemsの Ellipse-D は使いやすく、非常に正確で安定しており、フォームファクタが小さく、これらはすべてWATonoTruckの開発に不可欠でした。」 | Amir K.、ウォータールー大学教授兼ディレクター

道路での事故は、ドライバーのミス、悪天候、または車両の故障が原因で発生することは周知の事実です。しかし、これらの事故を回避するために、車両が自動運転できるとしたらどうでしょうか?たとえば、自動運転トラックや自動運転車など。
それが自動運転車の背景にある考え方であり、ウォータールー大学のメカトロニクス車両システム(MVS)研究所は、WATonoTruck(WATerloo atonomous Truck)と呼ばれるプロジェクトに取り組んでいます。
これは、重量物の取り扱い、農業、およびサービスアプリケーション向けに設計された自動運転フラットベッドトラックです。高度な制御方法を使用して、特に危険な状況や故障シナリオでのトラックの動きを分析し、安全性と効率を確保します。
この研究所は、自動運転車技術の応用を旅客輸送以外の分野に拡大することを目指しています。農業、鉱業、海運などの他の産業でも使用し、効率を高め、稼働停止時間を短縮したいと考えています。
WATonoTruckのご紹介
運転手不要のトラック、それがWATonoTruckです!独立した車輪駆動および操舵システムを備えた自動運転フラットベッドトラックです。コーナーモジュール(CM)プラットフォーム上に構築されています。
CMは、モジュール式車両設計を念頭に置いて開発され、あらゆる構成であらゆるシャーシに取り付けることができます。
各CMは、独自の制御ユニットを備えた単輪電気自動車として機能します。駆動、ブレーキ、ステアリング、サスペンションシステムと独立して動作できます。
これにより、トラックは非常にスマートになり、あらゆる用途や地形に適応できます。
Ellipse-D によって強化された WATonoTruck
高精度な測位・ナビゲーションソリューションのリーディングカンパニーとして、SBG Systemsはウォータールー大学のメカトロニック・ビークル・システム・ラボとのコラボレーションを誇りに思っています。
SBG Systemsは、デュアルアンテナRTK INSであるEllipse-Dを提供し、比類のない位置と方位の精度を実現します。
このレベルの精度は、自律航法にとって非常に重要であり、困難な環境下でもWATonoTruckの安全かつ正確な移動を保証します。

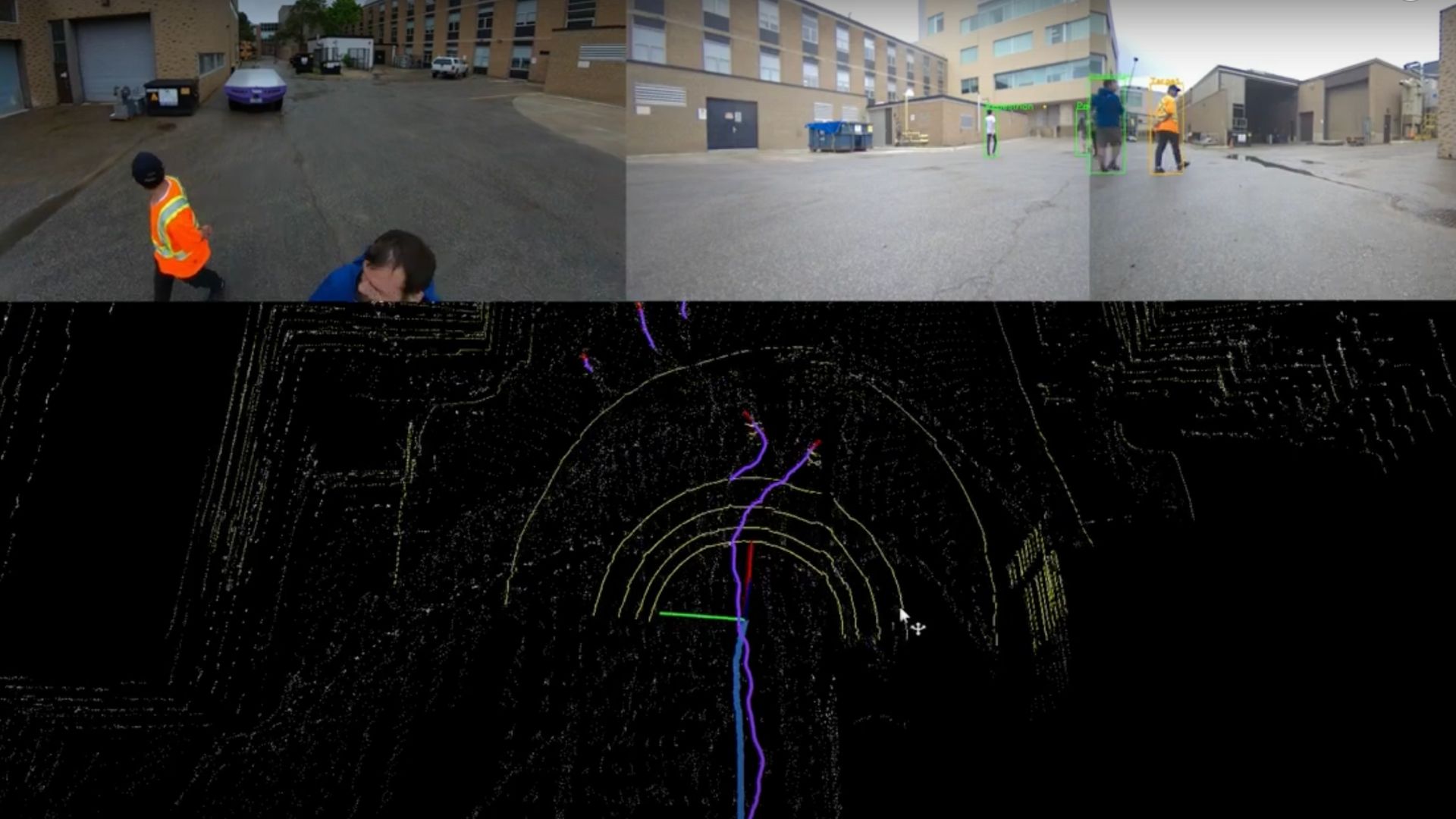
Ellipse-D(第3世代)、LiDARセンサー、高機能カメラ。これらの包括的なセンサー群は、リアルタイムの環境マッピング、障害物検知、経路計画を可能にします。
当社のスポンサーシップを通じて、研究所のWATonoTruck開発は、信頼できる高精度なMotion and Navigationを確保する上で不可欠なサポートを得ています。
この共同の取り組みは、WATonoTruckの成功裡の開発に貢献するだけでなく、業界全体での自動運転車アプリケーションの成長を促進し、交通およびそれ以外の分野におけるイノベーションと安全性を推進します。

Ellipse-D
Ellipse、デュアルアンテナおよびデュアル周波数RTKGNSS 統合した慣性航法システムGNSS 当社の後処理ソフトウェア「Qinertia」に対応しています。
ロボット工学および地理空間アプリケーション向けに設計されており、オドメーター Pulse OBDIIを融合させるGNSS 、推測航法の精度を向上させることができます。

Ellipse-D の見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も一般的な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
RTKとPPKの違いは何ですか?
リアルタイムキネマティック(RTK)は、GNSS補正がほぼリアルタイムで送信される測位技術であり、通常はRTCM形式の補正ストリームを使用します。ただし、GNSS補正、特にその完全性、可用性、カバレッジ、および互換性を確保する上で課題が生じる可能性があります。
RTKポスト処理に対するPPKの主な利点は、データ処理アクティビティをポスト処理中に最適化できることです。これには、順方向および逆方向処理が含まれます。一方、リアルタイム処理では、修正とその伝送における中断または非互換性により、位置決めの精度が低下します。
GNSSポスト処理(PPK)対リアルタイム(RTK)の最初の重要な利点は、フィールドで使用されるシステムが、CORSから送信されるRTCM補正をINS/GNSSシステムに供給するためのデータリンク/無線を必要としないことです。
ポスト処理の導入における主な制約は、最終的なアプリケーションが環境に対応する必要があることです。一方、最適化された軌道を作成するために必要な追加の処理時間に耐えられるアプリケーションであれば、すべての成果物のデータ品質が大幅に向上します。
Precise Point Positioningとは?
Precise Point Positioning(PPP)は、衛星信号誤差を修正することにより、高精度測位を提供する衛星ナビゲーション技術です。従来のGNSS方式(RTKなど)とは異なり、PPPはグローバル衛星データと高度なアルゴリズムを利用して、正確な位置情報を提供します。
PPPは、ローカルリファレンスステーションを必要とせずに、世界のどこでも機能します。これにより、地上インフラストラクチャが不足している遠隔地や困難な環境でのアプリケーションに適しています。正確な衛星軌道およびクロックデータを使用し、大気およびマルチパス効果の補正とともに、PPPは一般的なGNSS誤差を最小限に抑え、センチメートルレベルの精度を達成できます。
PPPは、収集したデータを事後に分析する後処理測位に利用できる一方で、リアルタイム測位ソリューションも提供可能です。リアルタイムPPP(RTPPP)は利用が拡大しており、ユーザーはリアルタイムで補正を受信し、自己位置を決定できます。
