



Pulse OEM IMU miniaturizzata a 9 gradi di libertà (9DoF) di livello tattico IMU sistemi embedded mission-critical
Pulse OEM prestazioni inerziali di livello tattico, un'eccezionale resistenza alle condizioni ambientali e un sistema integrato di analisi delle vibrazioni in un OEM ultracompatto progettato per le applicazioni più esigenti.
Il Pulse OEM esente da restrizioni ITAR e non soggetto a limitazioni all'esportazione.
Caratteristiche
Il sistema OEM Pulse OEM sensori inerziali ad alte prestazioni con livelli diagnostici avanzati per garantire l'integrità dei dati. Progettato per garantire un'affidabilità fondamentale per le missioni critiche, il sistema coniuga la precisione dei dati grezzi dei sensori con una solida protezione dagli effetti ambientali e il rilevamento dei guasti in tempo reale.
Ogni unità viene sottoposta a una calibrazione termica multiasse individuale per garantire la stabilità nell'intero intervallo operativo.




Pulse OEM breve
Pulse OEM IMU OEM compattaIMU per garantire prestazioni di livello tattico.
Scopri di seguito le tecnologie e le caratteristiche alla base della sua eccezionale affidabilità e facilità di integrazione.
SWAP-C ottimizzato
Il Pulse OEM ingombri compatti di 30 mm (L) × 28 mm (W) × 13,3 mm (H), un peso di soli 19 g e un consumo energetico di 0,3 W, garantendo prestazioni di livello tattico anche nei sistemi embedded più limitati.

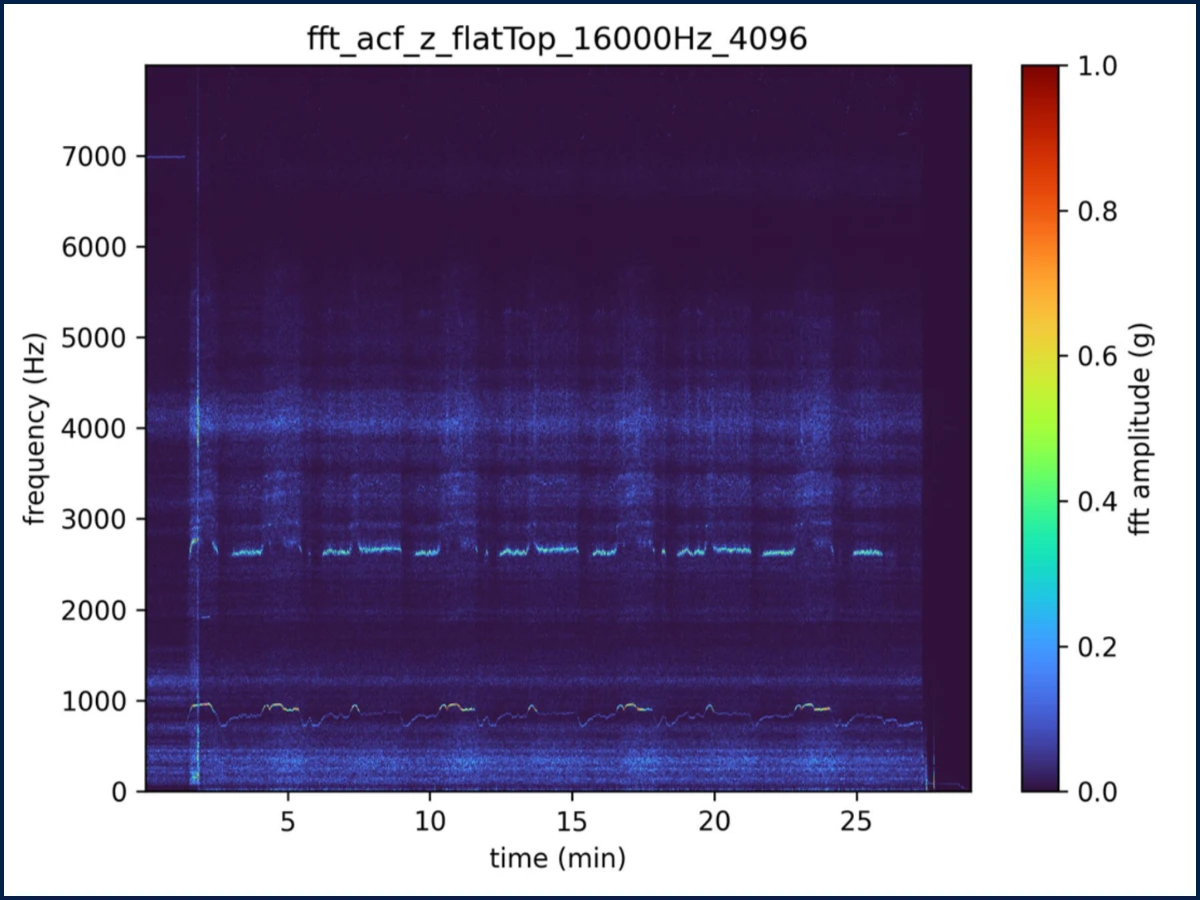
Strumento integrato per il monitoraggio delle vibrazioni
Il Pulse integra una soluzione dedicata al monitoraggio delle vibrazioni che fornisce lo spettro completo delle vibrazioni (FFT) fino a 8 kHz e avvisi di alto livello.
Magnetometro integrato
Il Pulse OEM magnetometri a tre assi integrati, che consentono una soluzione di rilevamento completa a 9 gradi di libertà (9-DoF) senza compromettere le dimensioni compatte del dispositivo.

API di alto livello e facile da usare
Basato sul framework di comunicazione standard SBG Systems, il Pulse OEM un’esperienza di integrazione coerente su tutti i prodotti.
Il protocollo sbgECom garantisce flussi di dati ad alta larghezza di banda e bassa latenza, mentre l’API RESTful sbgINSrestApi consente una configurazione e un controllo completi basati su software.
Specifiche del prodotto
Prestazioni dell'accelerometro
±40 g Ripetibilità della deriva a lungo termine
1250 µg Instabilità della polarizzazione in-run
6 μg Fattore di scala
500 ppm Velocity Random Walk
0.02 m/s/√h Errore di rettifica delle vibrazioni
0.03 mg/g² Larghezza di banda
250 Hz
Prestazioni del giroscopio
± 4000 °/s Ripetibilità della deriva a lungo termine
150 °/h Instabilità della polarizzazione in-run
0,6 °/h Fattore di scala
500 ppm Angular Random Walk
0,08 °/√h Errore di rettifica delle vibrazioni
0,2 °/h/g² Larghezza di banda
250 Hz
Interfacce
Binary sbgECom Frequenza di output
Fino a 2 kHz Input / Output
1x UART (LvTTL) – fino a 4 Mbps Sync IN/OUT
1 uscita Sync / 1 ingresso Clock Modalità Orologio
Interno o esterno (diretto a 2kHz o scalato) Configurazione IMU
sbgINSRestAPI (modalità clock, ODR, sync in/out, eventi)
Specifiche meccaniche ed elettriche
3.3 VDC Consumo energetico
0.30 W EMC
EN 55032:2015, EN 61000-4-3, EN 61000-6-1, EN 55024 Peso (g)
19 g Dimensioni (LxPxA)
30 mm x 28 mm x 13.3 mm
Specifiche ambientali e intervallo operativo
IP-50 Temperatura di esercizio
Da -40 °C a 85 °C Vibrazioni
10 g RMS – da 20 a 2 kHz e 6 g RMS da 20 Hz a 4,5 kHz Urti
2000 g per 0,3 ms MTBF (calcolato)
4 000 000 di ore Conforme a
MIL-STD-810
Progettato per applicazioni mission-critical
Versatile e collaudato sul campo, Pulse OEM le prestazioni, la robustezza e l’efficienza in termini di SWaP richieste dalle applicazioni mission-critical, che spaziano dalle munizioni a guida di precisione e dalla stabilizzazione dei cercatori ai sistemi di navigazione, all’optronica e alle piattaforme autonome.
Sistemi di navigazione
Pulse OEM dati affidabili di orientamento e movimento per i sistemi di navigazione che operano in ambienti GNSS, consentendo una stima accurata dell'assetto e la navigazione a stima su piattaforme terrestri, aeree e marittime.
Vantaggi principali
- Prestazioni inerziali di livello tattico
- Funzionalità avanzate di sincronizzazione dell'orologio con supporto per l'orologio interno e gli orologi esterni
- Eccellente stabilità di polarizzazione e ripetibilità
- Rumore molto basso per una maggiore precisione di navigazione
- Comprovata resistenza alle vibrazioni, ai disturbi EMC e agli ambienti difficili
- Magnetometri integrati per una migliore osservabilità della rotta
Sistemi autonomi
Pulse OEM dati affidabili relativi al rilevamento del movimento e all'orientamento per piattaforme autonome, supportando la localizzazione, la navigazione e il controllo in ambienti operativi difficili.
Vantaggi principali
- Prestazioni di livello tattico per un rilevamento accurato dell'assetto e del movimento
- Funzionalità avanzate di sincronizzazione dell'orologio con supporto per l'orologio interno e gli orologi esterni
- Design compatto ottimizzato in termini di SWaP
- Monitoraggio continuo integrato
- Maggiore resistenza alle vibrazioni e ai disturbi EMC
- OEM semplificata
Stabilizzazione EO/IR
Pulse OEM una stabilizzazione fluida e un puntamento preciso del carico utile per i sistemi optronici operanti su piattaforme mobili, offrendo eccellenti prestazioni di tracciamento in condizioni difficili.
Vantaggi principali
- Rumore molto basso per una precisione di stabilizzazione superiore (ARW 0,08 °/√h)
- Bassa latenza (1,5 ms dal movimento all'uscita)
- Misure ad alta larghezza di banda per circuiti di stabilizzazione reattivi
- Integrazione compatta e leggera
- Prestazioni costanti in ambienti soggetti a vibrazioni
Stazioni d'arma remote e torrette
Pulse OEM una stabilizzazione, un tracciamento e un puntamento precisi delle armi su piattaforme mobili, garantendo la precisione nonostante il movimento del veicolo, le vibrazioni e gli urti.
Vantaggi principali
- Eccellente stabilità angolare durante il movimento della piattaforma
- Elevata resistenza alle vibrazioni con basso valore VRE (0,02 °/h/g²)
- Bassa latenza per circuiti di stabilizzazione reattivi
- OEM compatto ma robusto
- Prestazioni costanti anche in condizioni operative difficili
Munizioni a guida di precisione (GNC)
Pulse OEM un rilevamento accurato del movimento per i sistemi di guida, navigazione e controllo di missili, razzi guidati e bombe plananti, combinando prestazioni di livello tattico con le dimensioni compatte, il peso ridotto e la resistenza alle condizioni ambientali richieste dalle moderne piattaforme di attacco di precisione.
Vantaggi principali
- Controllo completo della catena di approvvigionamento per le munizioni guidate e i programmi di difesa nazionale
- Giroscopio da ±4000°/s e accelerometro con campo di misura fino a 40 g per manovre altamente dinamiche
- Elevata resistenza alle condizioni ambientali, con una qualificazione approfondita che va oltre lo standard MIL-STD-810
- Stabilità di polarizzazione di livello tattico per la navigazione e la guida
- Dimensioni compatte (30 × 28 × 13,3 mm) e peso ridotto (19 g)
- Basso consumo energetico (0,3 W) per progetti soggetti a vincoli SWaP
Stabilizzazione e controllo del Seeker
Pulse OEM misurazioni dell'assetto a bassa latenza per i cercatori EO/IR, consentendo una stabilizzazione precisa della linea di vista, l'inseguimento del bersaglio e il controllo della guida terminale in ambienti altamente dinamici.
Vantaggi principali
- Catena di approvvigionamento controllata e tracciabile per i programmi di sviluppo di missili sovrani
- Misure a basso rumore e ad ampia larghezza di banda, con una latenza di soli 1,5 ms
- Giroscopio da ±4000°/s e accelerometro con campo di misura fino a 40 g per manovre altamente dinamiche
- Mantiene la precisione di puntamento durante le manovre aggressive
- Elevate frequenze di aggiornamento (2 kHz) per circuiti di controllo reattivi






Scheda tecnica di Pulse-40
Riceva tutte le caratteristiche e le specifiche dei sensori direttamente nella sua casella di posta!
Confronta Pulse-40 con altri prodotti
Scopri come il Pulse-40 si confronta con altri prodotti nella nostra tabella comparativa completa.
Scopri i vantaggi unici che offre in termini di prestazioni, precisione e design compatto, rendendolo una scelta di spicco per le vostre esigenze di orientamento e navigazione.
-

Pulse OEM
- Range dell'accelerometro
- ±40 g
- Range del giroscopio
- ± 4000 °/s
- Instabilità in-run del bias dell'accelerometro
- 6 μg
- Instabilità del Bias del giroscopio in-run
- 0,6 °/h
- Velocity Random Walk
- 0.02 m/s/√h
- Angular Random Walk
- 0,08 °/√h
- Larghezza di banda dell'accelerometro
- 250 Hz
- Larghezza di banda del giroscopio
- 250 Hz
- Frequenza di output
- Fino a 2kHz
- Tensione di esercizio
- Da 3.3 a 5.5 VDC
- Consumo energetico
- 0.30 W
- Peso (g)
- 19 g
- Dimensioni (LxPxA)
- 30 × 28 × 13,3 mm
-
- Range dell'accelerometro
- ± 40 g
- Range del giroscopio
- ± 1000 °/s
- Instabilità in-run del bias dell'accelerometro
- 14 µg
- Instabilità del Bias del giroscopio in-run
- 7 °/h
- Velocity Random Walk
- 0.03 m/s/√h
- Angular Random Walk
- 0,18 °/√h
- Larghezza di banda dell'accelerometro
- 203 Hz
- Larghezza di banda del giroscopio
- 125 Hz
- Frequenza di output
- Fino a 2kHz
- Tensione di esercizio
- Da 4 a 15 VDC
- Consumo energetico
- 400 mW
- Peso (g)
- 10 g
- Dimensioni (LxPxA)
- 26,8 x 18,8 x 9,5 mm
-
- Range dell'accelerometro
- ± 40 g
- Range del giroscopio
- ± 400 °/s
- Instabilità in-run del bias dell'accelerometro
- 6 μg
- Instabilità del Bias del giroscopio in-run
- 0,05 °/h
- Velocity Random Walk
- 0.02 m/s/√h
- Angular Random Walk
- 0,012 °/√h
- Larghezza di banda dell'accelerometro
- 450 Hz
- Larghezza di banda del giroscopio
- 100 Hz
- Frequenza di output
- Fino a 2 kHz
- Tensione di esercizio
- Da 5 a 36 VDC
- Consumo energetico
- 2 W
- Peso (g)
- 250 g
- Dimensioni (LxPxA)
- 56 x 56 x 48 mm


Compatibilità dei prodotti
Documentazione e risorse
Pulse-40 viene fornito con una documentazione completa, progettata per supportare gli utenti in ogni fase.
Dalle guide di installazione alla configurazione avanzata e alla risoluzione dei problemi, i nostri manuali chiari e dettagliati garantiscono un'integrazione e un funzionamento fluidi.
Casi di studio
Scopri i vantaggi unici dei nostri prodotti. Sono ad alte prestazioni, precisi e compatti. Questo li rende la scelta ideale per aiutarti a orientarti.
Ellipse alimenta un camion a guida autonoma
Navigazione autonoma

Rilevamento dei difetti delle rotaie di TREALIS con Apogee Navsight
Posizionamento di tram e treni
Come GapEOD garantisce rilievi geofisici più sicuri grazie a Ellipse
Posizionamento di tram e treni


Il nostro processo di produzione
Scopra la precisione e l'esperienza che si celano dietro ogni prodotto SBG Systems. Questo video offre uno sguardo approfondito su come progettiamo, produciamo e testiamo meticolosamente i nostri sistemi di navigazione inerziale ad alte prestazioni.
Dall'ingegneria avanzata al rigoroso controllo qualità, il nostro processo di produzione garantisce che ogni prodotto soddisfi i più elevati standard di affidabilità e accuratezza.
Guardi ora per saperne di più!

Richiedi un preventivo
Parlano di noi
Presentiamo le esperienze e le testimonianze di professionisti del settore e clienti che hanno utilizzato i nostri prodotti nei loro progetti.
Scopri come la nostra tecnologia innovativa ha trasformato le loro attività, migliorato la produttività e garantito risultati affidabili in diverse applicazioni.
Sezione FAQ
Benvenuti nella nostra sezione FAQ, dove rispondiamo alle vostre domande più urgenti sulla nostra tecnologia all’avanguardia e sulle sue applicazioni. Qui troverete risposte esaurienti sulle caratteristiche dei prodotti, sulle procedure di installazione, sui consigli per la risoluzione dei problemi e sulle migliori pratiche per ottimizzare la vostra esperienza.
Trovate qui le risposte che cercate!
Qual è la differenza tra IMU e INS?
La differenza tra un'unità di misura inerziale (IMU) e un sistema di navigazione inerziale (INS) risiede nella loro funzionalità e complessità.
IMU unità di misura inerziale) fornisce dati grezzi sull'accelerazione lineare e sulla velocità angolare del veicolo, misurati da accelerometri e giroscopi. Fornisce informazioni su rollio, beccheggio, imbardata e movimento, ma non calcola la posizione né i dati di navigazione. IMU progettata specificamente per trasmettere dati essenziali sul movimento e sull'orientamento affinché vengano elaborati esternamente per determinare la posizione o la velocità.
D'altra parte, un INS sistema di navigazione inerziale) combina IMU con algoritmi avanzati per calcolare la posizione, la velocità e l'orientamento di un veicolo nel tempo. Incorpora algoritmi di navigazione come il filtro di Kalman per la fusione e l'integrazione dei sensori. Un INS dati di navigazione in tempo reale, tra cui posizione, velocità e orientamento, senza fare affidamento su sistemi di posizionamento esterni come GNSS.
Questo sistema di navigazione viene tipicamente utilizzato in applicazioni che richiedono soluzioni di navigazione complete, in particolare in ambienti GNSS, come UAV militari, navi e sottomarini.
Cos'è un'unità di misura inerziale?
Le Unità di Misura Inerziali (IMU) sono dispositivi sofisticati che misurano e riportano la forza specifica di un corpo, la velocità angolare e talvolta l'orientamento del campo magnetico. Le IMU sono componenti cruciali in diverse applicazioni, tra cui navigazione, robotica e tracciamento del movimento. Ecco uno sguardo più approfondito alle loro caratteristiche e funzioni chiave:
- Accelerometri: Misurano l'accelerazione lineare lungo uno o più assi. Forniscono dati sulla velocità con cui un oggetto sta accelerando o rallentando e possono rilevare cambiamenti di movimento o posizione.
- Giroscopi: Misurano la velocità angolare, o il tasso di rotazione attorno a un asse specifico. I giroscopi aiutano a determinare i cambiamenti di orientamento, consentendo ai dispositivi di mantenere la loro posizione rispetto a un sistema di riferimento.
- Magnetometri (opzionale): Alcune IMU includono magnetometri, che misurano l'intensità e la direzione dei campi magnetici. Questi dati possono aiutare a determinare l'orientamento del dispositivo rispetto al campo magnetico terrestre, migliorando l'accuratezza della navigazione.
Le IMU forniscono dati continui sul movimento di un oggetto, consentendo il tracciamento in tempo reale della sua posizione e del suo orientamento. Queste informazioni sono fondamentali per applicazioni come droni, veicoli e robotica.
In applicazioni come i gimbal per fotocamere o gli UAV, le IMU aiutano a stabilizzare i movimenti compensando movimenti o vibrazioni indesiderate, con conseguenti operazioni più fluide.
