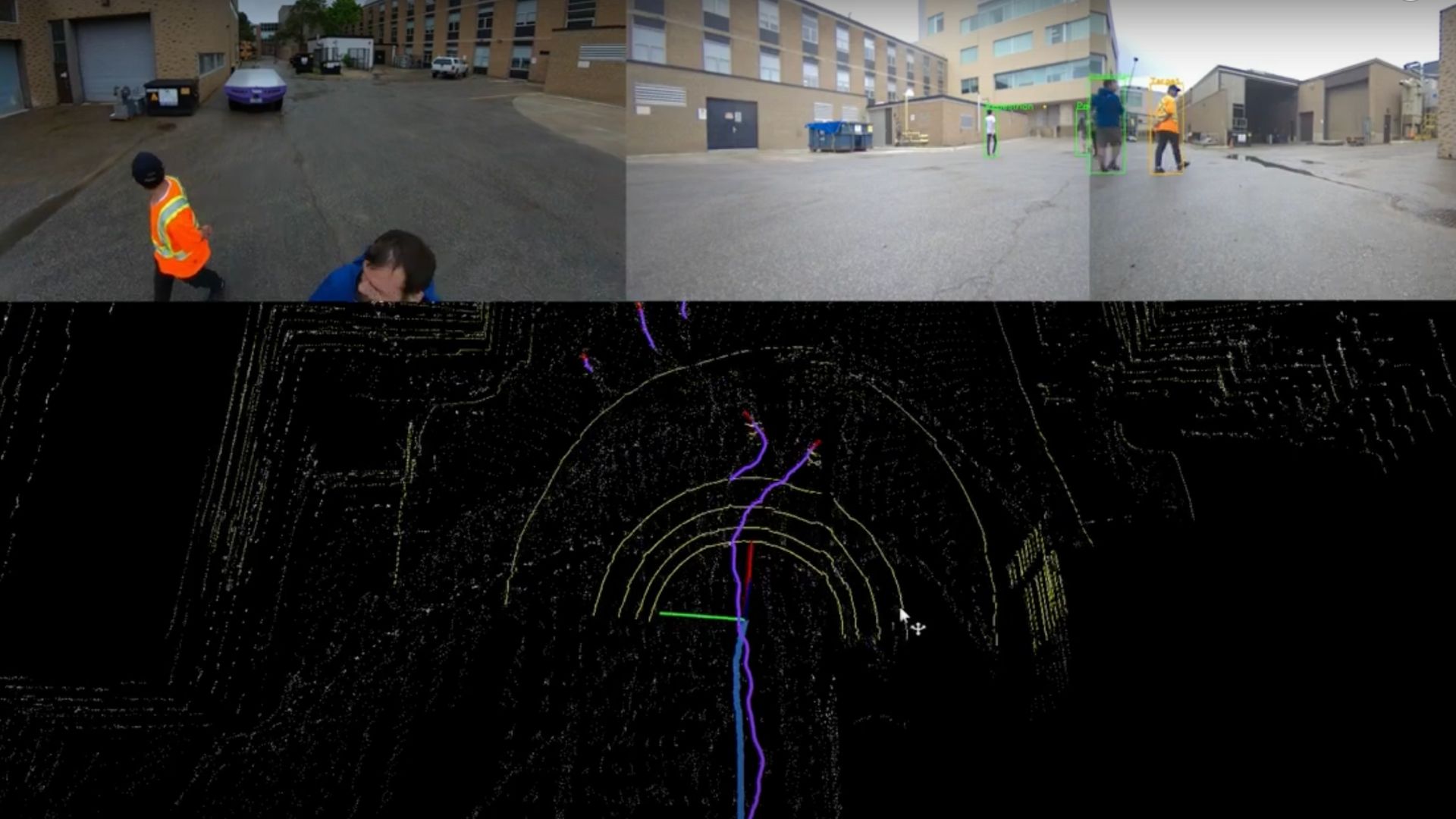
Ellipse-D alimenta un camion a guida autonoma
Camion a guida autonoma con sistema di guida e sterzo a ruote indipendenti.
"L'Ellipse-D di SBG Systems è stato facile da usare, molto preciso e stabile, con un fattore di forma ridotto, tutti elementi essenziali per lo sviluppo del nostro WATonoTruck.” | Amir K., Professore e Direttore, Università di Waterloo

Sappiamo tutti che gli incidenti stradali si verificano a causa di errori del conducente, condizioni meteorologiche avverse o malfunzionamenti del veicolo. Ma cosa succederebbe se potessimo far guidare i veicoli da soli, evitando questi incidenti? Ad esempio, un camion a guida autonoma o un'auto autonoma.
Questa è l'idea alla base dei veicoli a guida autonoma, e il Mechatronic Vehicle Systems (MVS) Lab dell'Università di Waterloo sta lavorando a un progetto chiamato WATonoTruck (WATerloo atonomous Truck).
Si tratta di un camion a pianale a guida autonoma progettato per la movimentazione di materiali pesanti, l'agricoltura e le applicazioni di servizio. Utilizza metodi di controllo avanzati per analizzare i movimenti del camion, soprattutto in condizioni pericolose o in scenari di malfunzionamento, garantendo sicurezza ed efficienza.
Il laboratorio mira ad estendere l'applicazione della tecnologia dei veicoli autonomi oltre il trasporto passeggeri. Vogliono utilizzarla in altri settori come l'agricoltura, l'industria mineraria e la navigazione, aumentando così l'efficienza e riducendo i tempi di inattività operativa.
Incontra WATonoTruck
Un camion che non ha bisogno di un conducente: questo è WATonoTruck! È un camion a pianale autoguidato con sistema di sterzo e trazione indipendente sulle ruote. È costruito sulla piattaforma del modulo angolare (CM).
I CM sono stati sviluppati pensando alla progettazione modulare dei veicoli e possono essere installati su qualsiasi telaio in qualsiasi configurazione.
Ogni CM funziona come un veicolo elettrico a ruota singola dotato di una propria unità di controllo. Consente di operare in modo indipendente con sistemi di guida, freno, sterzo e sospensione.
Questo rende il camion super intelligente e adattabile a qualsiasi applicazione e terreno.
WATonoTruck potenziato da Ellipse-D
In qualità di leader nelle soluzioni di posizionamento e navigazione ad alta precisione, siamo orgogliosi di collaborare con il Mechatronic Vehicle Systems Lab dell'Università di Waterloo.
Forniamo Ellipse-D, un INS RTK a doppia antenna, che offre una precisione ineguagliabile in posizione e orientamento.
Questo livello di precisione è cruciale per la navigazione autonoma, garantendo il movimento sicuro e accurato del WATonoTruck anche in ambienti difficili.

Ellipse-D (3a generazione), sensori LiDAR e telecamere avanzate: questa suite sensoristica completa consente la mappatura dell'ambiente in tempo reale, il rilevamento degli ostacoli e la pianificazione del percorso.
Grazie alla nostra sponsorizzazione, lo sviluppo di WATonoTruck da parte del laboratorio riceve un supporto fondamentale in termini di alta precisione, garantendo Motion e Navigation affidabili.
Questa iniziativa collaborativa non solo contribuisce allo sviluppo di successo di WATonoTruck, ma promuove anche la crescita delle applicazioni di veicoli autonomi in diversi settori, stimolando l'innovazione e la sicurezza nel trasporto e oltre.

Ellipse-D
L'Ellipse-D è un sistema di navigazione inerziale che integra una doppia antenna e un GNSS RTK a doppia frequenza compatibile con il nostro software di post-elaborazione Qinertia.
Progettato per applicazioni robotiche e geospaziali, può fondere l'input dell'odometro con Pulse o CAN OBDII per una maggiore accuratezza della navigazione stimata.

Richiedi un preventivo per Ellipse-D
Ha delle domande?
Benvenuti nella nostra sezione FAQ! Qui troverete le risposte alle domande più comuni sulle applicazioni che presentiamo. Se non trovate quello che state cercando, non esitate a contattarci direttamente!
Qual è la differenza tra RTK e PPK?
Il Real-Time Kinematic (RTK) è una tecnica di posizionamento in cui le correzioni GNSS vengono trasmesse in tempo quasi reale, tipicamente utilizzando un flusso di correzione in formato RTCM. Tuttavia, possono esserci delle sfide nell'assicurare le correzioni GNSS, in particolare la loro completezza, disponibilità, copertura e compatibilità.
Il vantaggio principale del PPK rispetto al post-processing RTK è che le attività di elaborazione dei dati possono essere ottimizzate durante il post-processing, inclusa l'elaborazione in avanti e all'indietro, mentre nell'elaborazione in tempo reale, qualsiasi interruzione o incompatibilità nelle correzioni e nella loro trasmissione porterà a un posizionamento di minore accuratezza.
Un primo vantaggio chiave del post-processing GNSS (PPK) rispetto al tempo reale (RTK) è che il sistema utilizzato sul campo non necessita di un datalink/radio per alimentare le correzioni RTCM provenienti dal CORS nel sistema INS/GNSS.
La principale limitazione all'adozione del post-processing è il requisito che l'applicazione finale agisca sull'ambiente. D'altra parte, se la tua applicazione può sopportare il tempo di elaborazione aggiuntivo necessario per produrre una traiettoria ottimizzata, migliorerà notevolmente la qualità dei dati per tutti i tuoi deliverable.
Cos'è il Precise Point Positioning?
Il Precise Point Positioning (PPP) è una tecnica di navigazione satellitare che offre un posizionamento ad alta precisione correggendo gli errori del segnale satellitare. A differenza dei metodi GNSS tradizionali, che spesso si basano su stazioni di riferimento a terra (come in RTK), il PPP utilizza dati satellitari globali e algoritmi avanzati per fornire informazioni accurate sulla posizione.
Il PPP funziona ovunque nel mondo senza la necessità di stazioni di riferimento locali. Questo lo rende adatto per applicazioni in ambienti remoti o difficili dove mancano infrastrutture a terra. Utilizzando dati precisi sull'orbita e sull'orologio dei satelliti, insieme a correzioni per gli effetti atmosferici e multipath, il PPP minimizza gli errori GNSS comuni e può raggiungere un'accuratezza a livello di centimetro.
Mentre il PPP può essere utilizzato per il posizionamento post-processato, che implica l'analisi dei dati raccolti a posteriori, può anche fornire soluzioni di posizionamento in tempo reale. Il PPP in tempo reale (RTPPP) è sempre più disponibile, consentendo agli utenti di ricevere correzioni e determinare la loro posizione in tempo reale.
