

Navegación denegada o con dificultades
La navegación denegada o degradada se refiere a entornos en los que los sistemas de posicionamiento pierden precisión, disponibilidad o integridad. Estas condiciones afectan a la navegación GNSS, incluidos el GPS, Galileo y otras constelaciones de satélites. Los ingenieros suelen denominar a estos escenarios «entornos GNSS » o «entornos GNSS».
El bloqueo de la señal suele provocar la denegación de la navegación en cañones urbanos, túneles, bosques densos u operaciones submarinas. Los edificios, el terreno o las estructuras impiden que los satélites lleguen al receptor. Como resultado, el sistema no puede calcular una posición fiable.
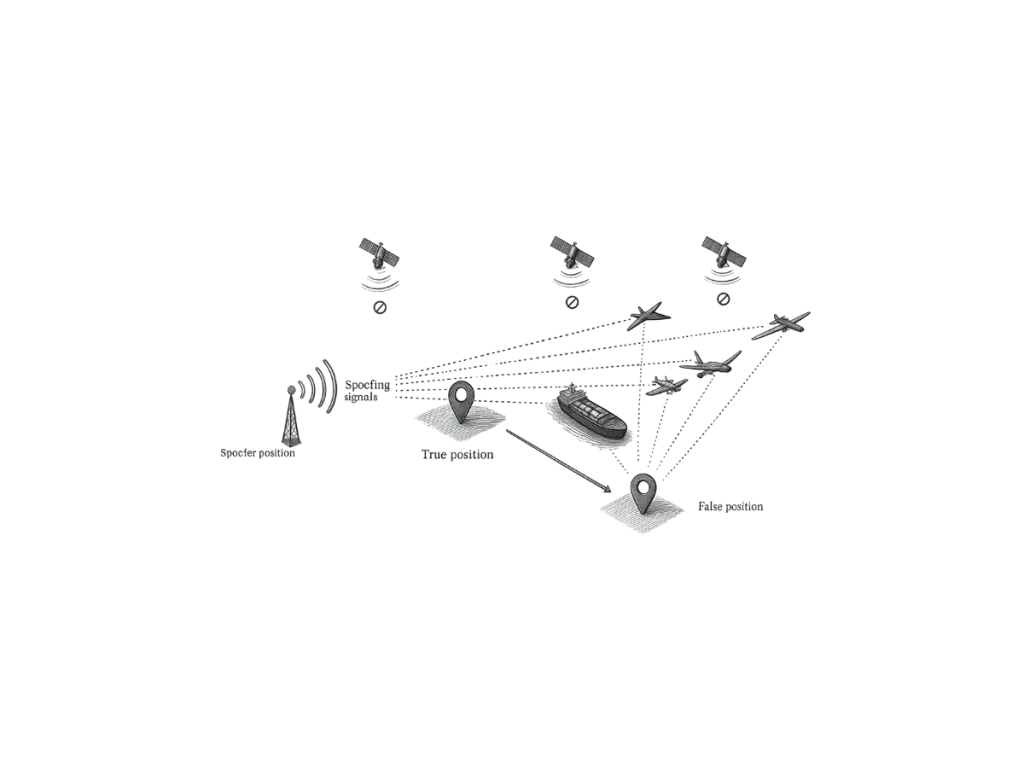
Las interferencias y el bloqueo también degradan el rendimiento de la navegación. Las señales de radiofrecuencia, ya sean intencionadas o no, perturban GNSS . Estas interferencias reducen la calidad de la señal y aumentan los errores de posicionamiento. La suplantación (spoofing) representa otra amenaza crítica en entornos de navegación degradada. Los atacantes transmiten GNSS falsificadas para engañar a los receptores. Esta manipulación provoca información incorrecta sobre la posición, la velocidad o la sincronización.
Alternativas para entornos GNSS
Los sistemas de navegación inercial (INS) ofrecen una alternativa sólida en situaciones de navegación con cobertura denegada o degradada. INS acelerómetros y giroscopios para calcular la posición, la velocidad y la orientación. Estos sensores funcionan independientemente de las señales externas. Los ingenieros integran GNSS INS garantizar un rendimiento de navegación continuo. Cuando GNSS se degradan, el INS el posicionamiento mediante navegación por estima. Este enfoque híbrido mejora la resiliencia y la fiabilidad.
Sin embargo, INS se desvía con el tiempo debido a los errores de los sensores. Las unidades de medición inercial (IMU) de alto rendimiento reducen esta deriva de forma significativa. Los algoritmos de filtrado avanzados también mejoran la precisión del sistema durante GNSS .
Soluciones de navegación avanzadas para entornos de misión crítica
Aplicaciones como los vehículos autónomos, los UAV y los sistemas de defensa dependen de soluciones de navegación en condiciones de bloqueo. Estos sistemas requieren un posicionamiento continuo y fiable en entornos difíciles (navegación por estima). Una navegación robusta garantiza el éxito de la misión y la seguridad operativa.
Para optimizar el rendimiento, los ingenieros combinan múltiples sensores, entre ellos LiDAR, cámaras y odómetros. Las técnicas de fusión de sensores mejoran la precisión y mitigan las limitaciones de cada sensor individual.
La navegación en condiciones de bloqueo o degradación sigue siendo un reto crítico en los sistemas de navegación modernos. Las soluciones inerciales avanzadas y las estrategias de fusión de sensores ofrecen alternativas fiables. Estas tecnologías garantizan un posicionamiento preciso cuando GNSS fallan o se degradan.
