

Відсутність або погіршення навігації
Терміни «відсутність навігації» або «погіршення якості навігації» описують умови, за яких системи визначення місцезнаходження втрачають точність, доступність або цілісність. Ці умови впливають на навігацію GNSS, зокрема GPS, Galileo та інших супутникових груп. Інженери часто називають такі сценарії середовищами deniedGNSS або GNSS».
Блокування сигналу зазвичай спричиняє denied в міських каньйонах, тунелях, густих лісах або під час підводних операцій. Будівлі, рельєф місцевості або споруди заважають супутникам досягати приймача. Як наслідок, система не може обчислити надійне місцезнаходження.
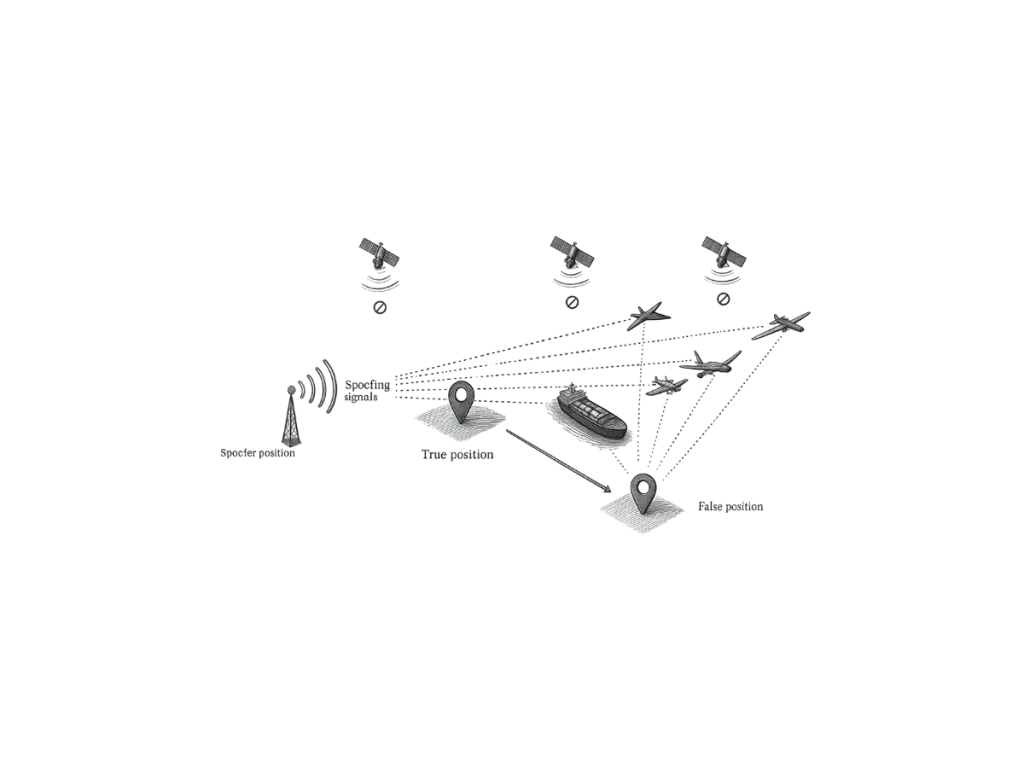
Перешкоди та глушіння також погіршують ефективність навігації. Навмисні або випадкові радіочастотні сигнали порушують GNSS . Ці перешкоди знижують якість сигналу та збільшують похибки визначення місцезнаходження. Спуфінг є ще однією серйозною загрозою в умовах погіршеної навігації. Зловмисники передають підроблені GNSS , щоб ввести приймачі в оману. Ця маніпуляція призводить до неправильної інформації про місцезнаходження, швидкість або час.
Альтернативні рішення для умов, де GNSS
Інерційні навігаційні системи (INS) є надійною альтернативою в умовах denied погіршення якості навігаційних сигналів. INS акселерометри та гіроскопи для обчислення положення, швидкості та орієнтації. Ці датчики працюють незалежно від зовнішніх сигналів. Інженери інтегрують GNSS INS забезпечити безперебійну роботу навігаційної системи. Коли GNSS погіршується, INS визначення положення за допомогою dead reckoning. Цей гібридний підхід підвищує стійкість та надійність системи.
Однак INS з часом знижується через похибки датчиків. Високоефективні інерційні вимірювальні блоки (IMU) значно зменшують це відхилення. Сучасні алгоритми фільтрації також підвищують точність системи під час GNSS .
Передові навігаційні рішення для середовищ, де дотримання вимог є критично важливим
Такі сфери застосування, як автономні транспортні засоби, безпілотні літальні апарати та оборонні системи, покладаються на рішення denied . Ці системи потребують безперервного та надійного визначення координат у складних умовах (dead-reckoning). Надійна навігація гарантує успіх місії та безпеку експлуатації.
Для оптимізації продуктивності інженери поєднують декілька датчиків, зокрема LiDAR, камери та одометри. Техніки об'єднання даних з датчиків підвищують точність та компенсують обмеження окремих датчиків.
Навігація в умовах відсутності або погіршення сигналу залишається критичним викликом для сучасних навігаційних систем. Сучасні інерційні рішення та стратегії об'єднання даних з датчиків забезпечують надійні альтернативи. Ці технології гарантують точне визначення місцезнаходження у випадках, коли GNSS відсутні або мають погіршену якість.
