请告诉我们您的项目
 Ellipse-D
Ellipse-D
 Ekinox Micro
Ekinox Micro
Ellipse-D
INS
双天线 RTK INS
0.05 ° 横滚和俯仰
0.2 ° 航向精度
发现
Ekinox Micro
INS
内部 GNSS 单/双天线
0.015 ° 横滚和纵倾
0.05 ° 航向精度
发现
导航受阻或质量下降
“导航受阻”或“导航降级”是指定位系统失去精度、可用性或完整性的环境。这些情况会影响GNSS导航,包括GPS、伽利略及其他卫星星座。工程师通常将此类场景称为GNSS GNSS环境。
在城市峡谷、隧道、密林或水下作业中,信号阻挡通常会导致导航受阻。 建筑物、地形或结构物会阻挡卫星信号到达接收机。因此,系统无法计算出可靠的位置。
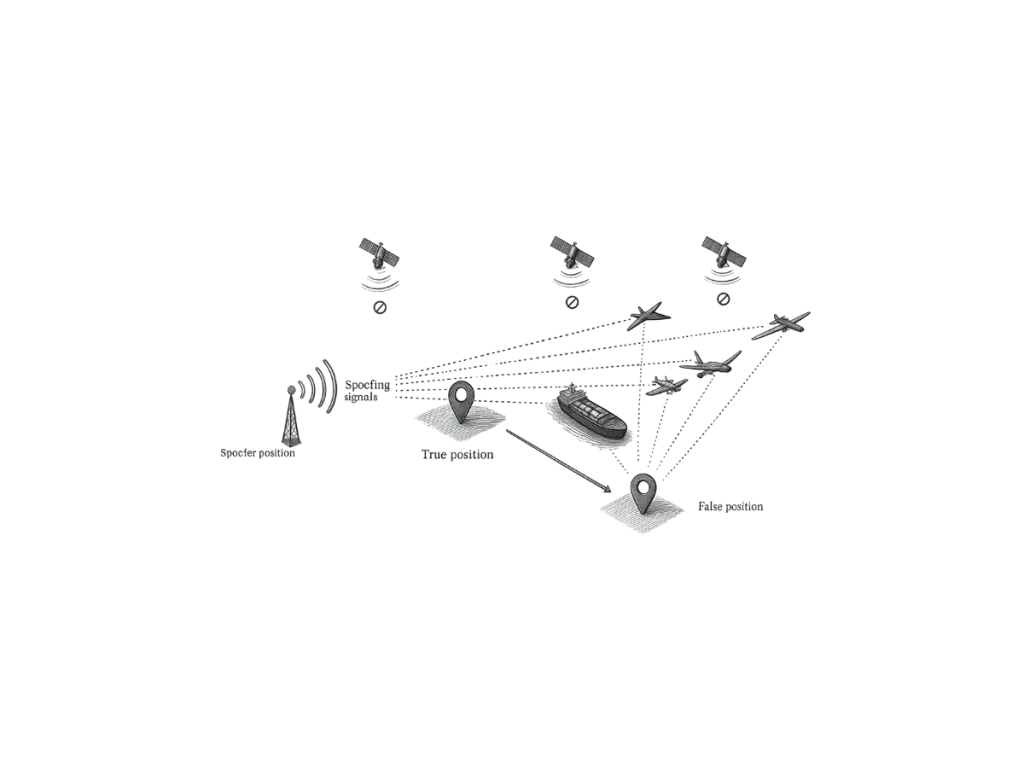
干扰和阻塞也会降低导航性能。有意或无意的射频信号会干扰GNSS 。这种干扰会降低信号质量并增加定位误差。在导航性能受损的环境中,欺骗攻击是另一种严重的威胁。攻击者会发送伪造的GNSS 来误导接收机。这种操纵会导致位置、速度或时间信息出现错误。
适用于GNSS环境的替代方案
惯性导航系统(INS)在导航受阻或性能下降的情况下提供了一种可靠的替代方案。INS 速度计和陀螺INS 计算位置、速度和姿态。这些传感器无需依赖外部信号即可独立工作。工程师GNSS INS 集成INS 导航性能的连续性。GNSS 下降时,INS 通过推算导航INS 定位。这种混合方案提高了系统的韧性和可靠性。
然而,由于传感器误差,INS 会随时间推移而漂移。 高性能惯性测量单元(IMU)可显著减少这种漂移。先进的滤波算法也能GNSS 期间提高系统精度。
适用于关键任务环境的高级导航解决方案
自动驾驶汽车、无人机和国防系统等应用依赖于受限导航解决方案。这些系统需要在恶劣环境下实现持续且可靠的定位(推算导航)。稳健的导航能力是确保任务成功和运行安全的关键。
为优化性能,工程师们将多种传感器(包括激光雷达、摄像头和里程计)进行组合。传感器融合技术可提高精度并弥补单个传感器的局限性。
受限或退化的导航环境仍是现代导航系统面临的关键挑战。 先进的惯性解决方案和传感器融合策略提供了可靠的替代方案。这些技术可在GNSS 丢失或受损时确保精确定位。
