

Navigazione impossibile o compromessa
La navigazione negata o degradata descrive ambienti in cui i sistemi di posizionamento perdono precisione, disponibilità o integrità. Queste condizioni influenzano la navigazione GNSS, inclusi GPS, Galileo e altre costellazioni satellitari. Gli ingegneri spesso definiscono questi scenari “ambienti GNSS ” o “ambienti GNSS”.
L’ostacolo del segnale causa comunemente la navigazione negata nei canyon urbani, nelle gallerie, nelle foreste fitte o durante le operazioni subacquee. Edifici, rilievi o strutture impediscono ai satelliti di raggiungere il ricevitore. Di conseguenza, il sistema non è in grado di calcolare una posizione affidabile.
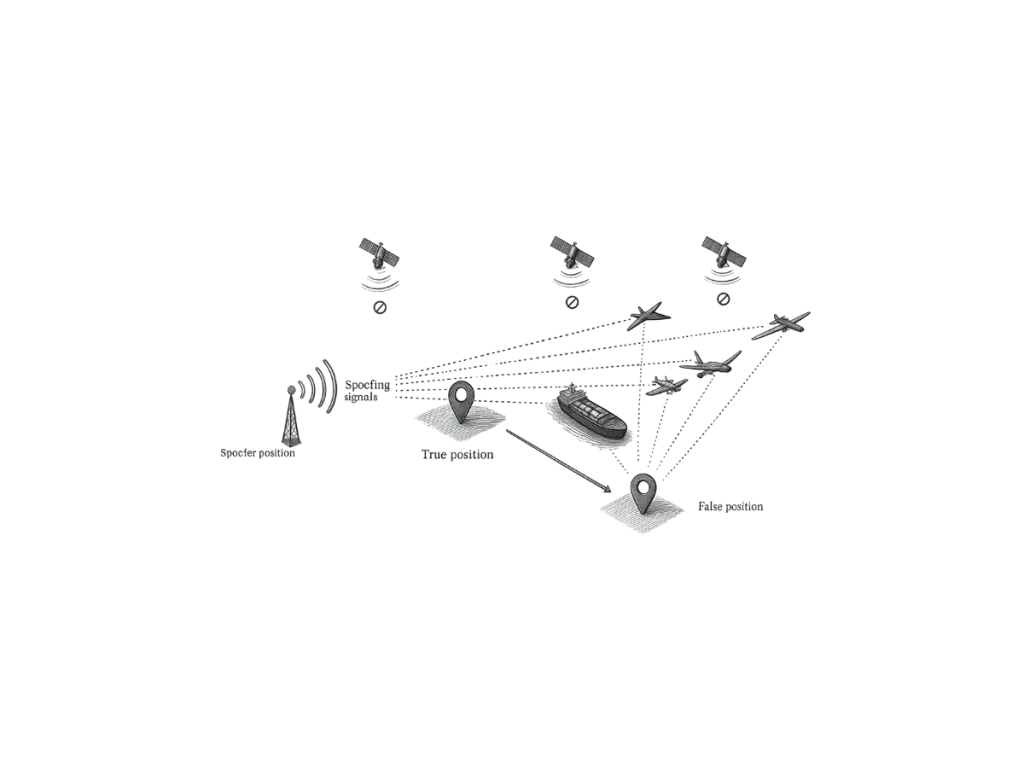
Anche le interferenze e le manomissioni compromettono le prestazioni di navigazione. Segnali in radiofrequenza, intenzionali o accidentali, disturbano GNSS . Queste interferenze riducono la qualità del segnale e aumentano gli errori di posizionamento. Lo spoofing rappresenta un’altra minaccia critica negli ambienti di navigazione con prestazioni ridotte. Gli aggressori trasmettono GNSS contraffatti per fuorviare i ricevitori. Questa manipolazione causa informazioni errate relative a posizione, velocità o tempistica.
Soluzioni alternative per ambienti GNSS
I sistemi di navigazione inerziale (INS) rappresentano una valida alternativa in scenari di navigazione con segnali assenti o di qualità ridotta. INS accelerometri e giroscopi per calcolare posizione, velocità e orientamento. Questi sensori funzionano indipendentemente dai segnali esterni. Gli ingegneri integrano GNSS INS garantire prestazioni di navigazione continue. Quando GNSS si indeboliscono, INS il posizionamento tramite navigazione a stima. Questo approccio ibrido migliora la resilienza e l’affidabilità.
Tuttavia, INS subisce derive nel tempo a causa degli errori dei sensori. Le unità di misura inerziale (IMU) ad alte prestazioni riducono significativamente questa deriva. Anche algoritmi di filtraggio avanzati migliorano la precisione del sistema durante GNSS .
Soluzioni di navigazione avanzate per ambienti critici
Applicazioni quali veicoli autonomi, UAV e sistemi di difesa si affidano a soluzioni di navigazione in condizioni di sinyal denegato. Questi sistemi richiedono un posizionamento continuo e affidabile in ambienti difficili (navigazione a stima). Una navigazione robusta garantisce il successo della missione e la sicurezza operativa.
Per ottimizzare le prestazioni, gli ingegneri combinano più sensori, tra cui LiDAR, telecamere e odometri. Le tecniche di fusione dei sensori migliorano la precisione e mitigano i limiti dei singoli sensori.
La navigazione in condizioni di sinyal denegato o degradato rimane una sfida critica nei moderni sistemi di navigazione. Soluzioni inerziali avanzate e strategie di fusione dei sensori forniscono alternative affidabili. Queste tecnologie garantiscono un posizionamento accurato quando GNSS falliscono o si deteriorano.
