

Navegação impossibilitada ou prejudicada
A navegação impedida ou prejudicada refere-se a ambientes em que os sistemas de posicionamento perdem precisão, disponibilidade ou integridade. Essas condições afetam a navegação GNSS, incluindo GPS, Galileo e outras constelações de satélites. Os engenheiros costumam chamar esses cenários de ambientes GNSS ou GNSS.
O bloqueio de sinal geralmente causa navegação impedida em canyons urbanos, túneis, florestas densas ou operações subaquáticas. Edifícios, relevo ou estruturas impedem que os satélites alcancem o receptor. Como resultado, o sistema não consegue calcular uma posição confiável.
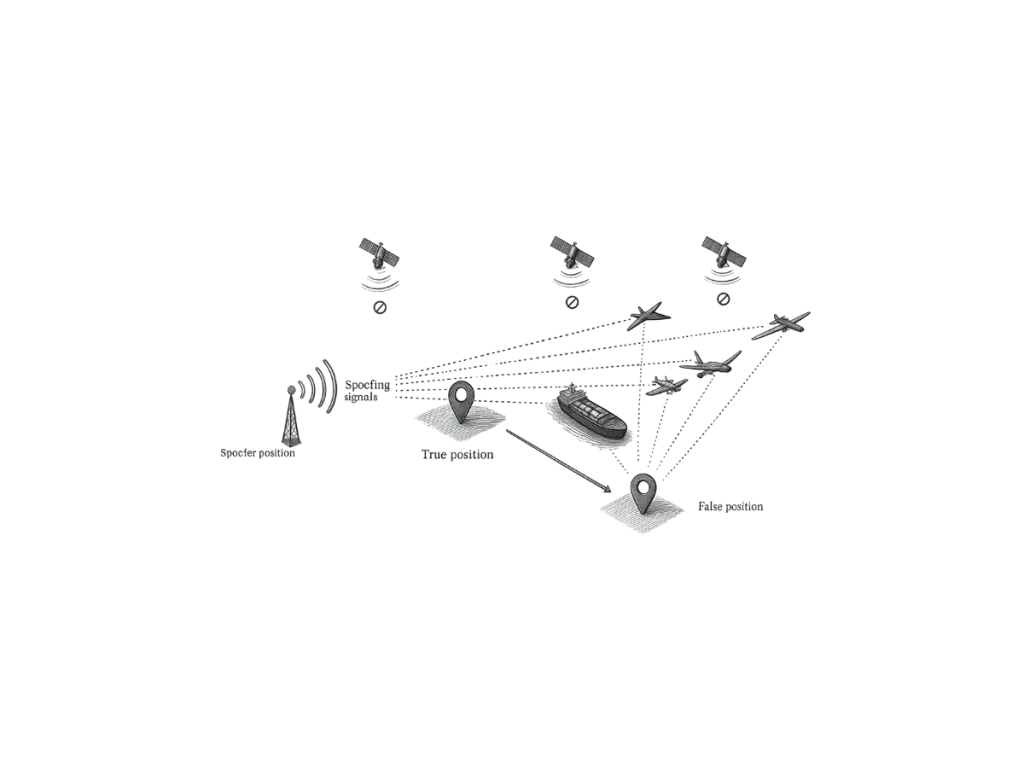
Interferências e bloqueios também prejudicam o desempenho da navegação. Sinais de radiofrequência, intencionais ou não, perturbam GNSS . Essa interferência reduz a qualidade do sinal e aumenta os erros de posicionamento. O spoofing representa outra ameaça crítica em ambientes de navegação prejudicada. Os invasores transmitem GNSS falsificados para induzir os receptores ao erro. Essa manipulação gera informações incorretas de posição, velocidade ou tempo.
Alternativas para ambientes GNSS
Os sistemas de navegação inercial (INS) oferecem uma alternativa robusta em cenários de navegação com sinal bloqueado ou prejudicado. INS acelerômetros e giroscópios para calcular a posição, a velocidade e a orientação. Esses sensores operam independentemente de sinais externos. Os engenheiros integram GNSS INS garantir um desempenho contínuo da navegação. Quando GNSS se deterioram, o INS o posicionamento por meio da navegação por estimativa. Essa abordagem híbrida melhora a resiliência e a confiabilidade.
No entanto, INS sofre desvios ao longo do tempo devido a erros dos sensores. Unidades de medição inercial (IMUs) de alto desempenho reduzem significativamente esse desvio. Algoritmos avançados de filtragem também aumentam a precisão do sistema durante GNSS .
Soluções avançadas de navegação para ambientes de missão crítica
Aplicações como veículos autônomos, UAVs e sistemas de defesa dependem de soluções de navegação em condições de sinal ausente. Esses sistemas exigem posicionamento contínuo e confiável em ambientes desafiadores (navegação por estimativa). Uma navegação robusta garante o sucesso da missão e a segurança operacional.
Para otimizar o desempenho, os engenheiros combinam vários sensores, incluindo LiDAR, câmeras e odômetros. As técnicas de fusão de sensores melhoram a precisão e mitigam as limitações de cada sensor individualmente.
A navegação em condições de sinal ausente ou degradado continua sendo um desafio crítico nos sistemas de navegação modernos. Soluções inerciais avançadas e estratégias de fusão de sensores oferecem alternativas confiáveis. Essas tecnologias garantem um posicionamento preciso quando GNSS falham ou se deterioram.
