

Brak nawigacji lub jej ograniczona dostępność
Termin „brak nawigacji” lub „ograniczona nawigacja” odnosi się do środowisk, w których systemy pozycjonowania tracą dokładność, dostępność lub integralność. Warunki te mają wpływ na nawigację GNSS, w tym GPS, Galileo i innych konstelacjach satelitarnych. Inżynierowie często nazywają te scenariusze środowiskami GNSS lub GNSS.
Blokada sygnału często powoduje brak nawigacji w kanionach miejskich, tunelach, gęstych lasach lub podczas operacji podwodnych. Budynki, ukształtowanie terenu lub konstrukcje uniemożliwiają satelitom dotarcie do odbiornika. W rezultacie system nie jest w stanie obliczyć wiarygodnej pozycji.
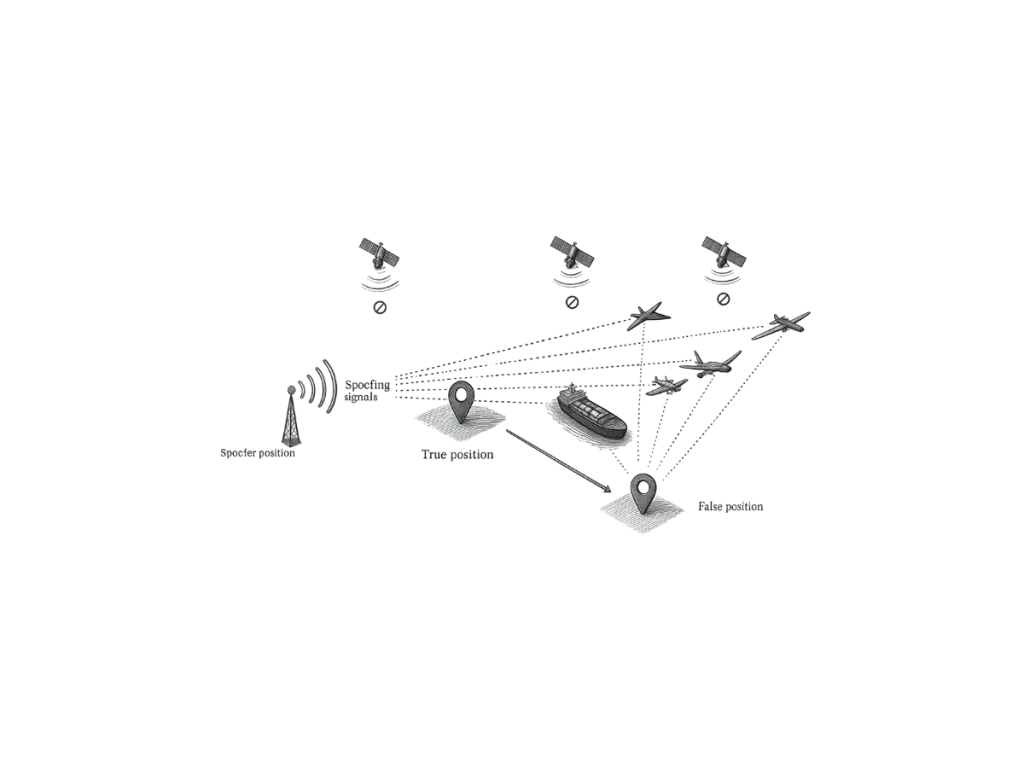
Zakłócenia i blokowanie sygnału również pogarszają wydajność nawigacji. Celowe lub niecelowe sygnały o częstotliwości radiowej zakłócają GNSS . Zakłócenia te obniżają jakość sygnału i zwiększają błędy pozycjonowania. Spoofing stanowi kolejne poważne zagrożenie w środowiskach o ograniczonej nawigacji. Atakujący wysyłają sfałszowane GNSS , aby wprowadzić odbiorniki w błąd. Ta manipulacja powoduje podanie nieprawidłowych informacji dotyczących pozycji, prędkości lub czasu.
Rozwiązania alternatywne dla środowisk, w których działanie systemów GNSS
Systemy nawigacji inercyjnej (INS) stanowią niezawodną alternatywę w sytuacjach, gdy dostęp do sygnałów nawigacyjnych jest ograniczony lub ich jakość uległa pogorszeniu. INS akcelerometry i żyroskopy do obliczania pozycji, prędkości i orientacji. Czujniki te działają niezależnie od sygnałów zewnętrznych. Inżynierowie integrują GNSS INS zapewnić ciągłość działania nawigacji. Gdy GNSS ulega pogorszeniu, system INS pozycjonowanie na podstawie nawigacji zliczeniowej. To hybrydowe podejście zwiększa odporność i niezawodność.
Jednak INS z czasem ulega odchyleniom z powodu błędów czujników. Wysokowydajne inercyjne jednostki pomiarowe (IMU) znacznie ograniczają tę zmienność. Zaawansowane algorytmy filtrowania również zwiększają dokładność systemu podczas GNSS .
Zaawansowane rozwiązania nawigacyjne dla środowisk o znaczeniu krytycznym
Zastosowania takie jak pojazdy autonomiczne, bezzałogowe statki powietrzne (UAV) oraz systemy obronne opierają się na rozwiązaniach nawigacyjnych w warunkach ograniczonej dostępności sygnałów. Systemy te wymagają ciągłego i niezawodnego pozycjonowania w trudnych warunkach (nawigacja zliczeniowa). Niezawodna nawigacja gwarantuje powodzenie misji i bezpieczeństwo operacyjne.
Aby zoptymalizować wydajność, inżynierowie łączą wiele czujników, w tym LiDAR, kamery i liczniki drogi. Techniki fuzji czujników zwiększają dokładność i ograniczają ograniczenia poszczególnych czujników.
Nawigacja w warunkach ograniczonej dostępności lub pogorszonej jakości sygnałów pozostaje kluczowym wyzwaniem dla współczesnych systemów nawigacyjnych. Zaawansowane rozwiązania inercyjne i strategie fuzji czujników zapewniają niezawodne alternatywy. Technologie te zapewniają dokładne pozycjonowanie w przypadku awarii lub osłabienia GNSS .
