

Denied or degraded navigation
Denied or degraded navigation describes environments where positioning systems lose accuracy, availability, or integrity. These conditions affect GNSS-based navigation, including GPS, Galileo, and other satellite constellations. Engineers often call these scenarios GNSS-denied or GNSS-degraded environments.
Signal blockage commonly causes denied navigation in urban canyons, tunnels, dense forests, or underwater operations. Buildings, terrain, or structures prevent satellites from reaching the receiver. As a result, the system cannot compute a reliable position.
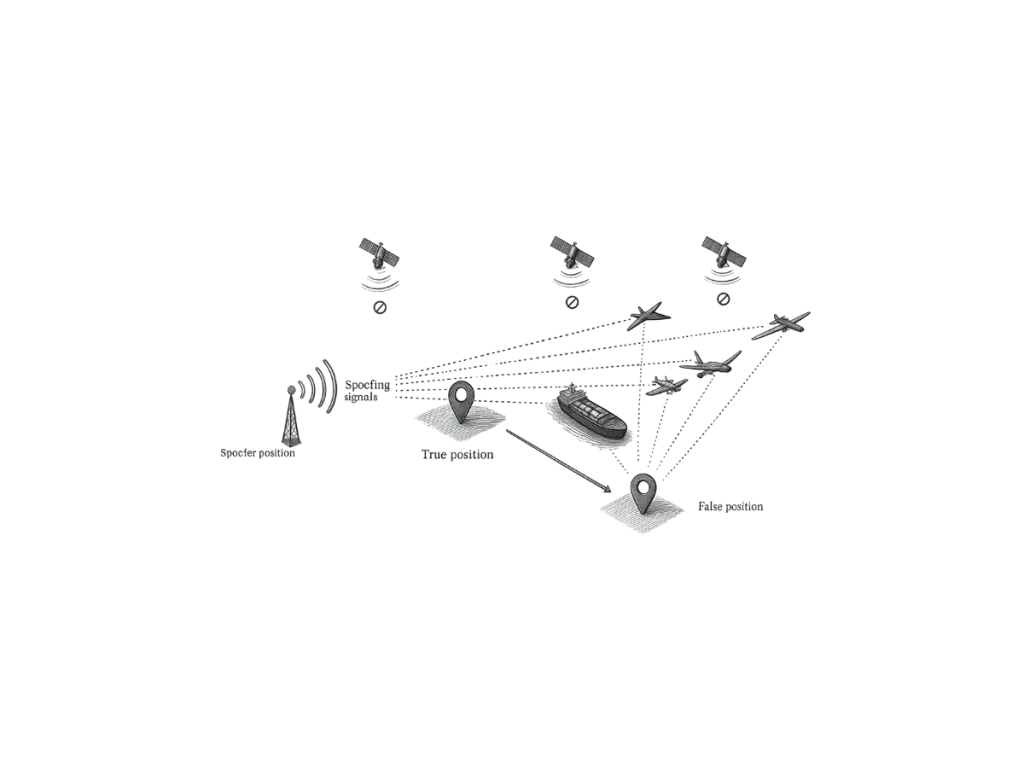
Interference and jamming also degrade navigation performance. Intentional or unintentional radio frequency signals disrupt GNSS reception. This interference reduces signal quality and increases positioning errors. Spoofing represents another critical threat in degraded navigation environments. Attackers transmit counterfeit GNSS signals to mislead receivers. This manipulation causes incorrect position, velocity, or timing information.
Alternatives for GNSS-challenged environments
Inertial navigation systems (INS) provide a robust alternative in denied or degraded navigation scenarios. INS uses accelerometers and gyroscopes to compute position, velocity, and orientation. These sensors operate independently from external signals. Engineers integrate GNSS and INS to ensure continuous navigation performance. When GNSS signals degrade, the INS maintains positioning through dead reckoning. This hybrid approach improves resilience and reliability.
However, INS accuracy drifts over time due to sensor errors. High-performance inertial measurement units (IMUs) reduce this drift significantly. Advanced filtering algorithms also enhance system accuracy during GNSS outages.
Advanced navigation solutions for mission-critical environments
Applications such as autonomous vehicles, UAVs, and defense systems rely on denied navigation solutions. These systems require continuous and reliable positioning in challenging environments (dead-reckoning). Robust navigation ensures mission success and operational safety.
To optimize performance, engineers combine multiple sensors, including LiDAR, cameras, and odometers. Sensor fusion techniques improve accuracy and mitigate individual sensor limitations.
Denied or degraded navigation remains a critical challenge in modern navigation systems. Advanced inertial solutions and sensor fusion strategies provide reliable alternatives. These technologies ensure accurate positioning when GNSS signals fail or degrade.
