

Navigation impossible ou perturbée
La navigation bloquée ou dégradée désigne les environnements dans lesquels les systèmes de positionnement perdent en précision, en disponibilité ou en intégrité. Ces conditions affectent la navigation GNSS, notamment le GPS, Galileo et d’autres constellations de satellites. Les ingénieurs qualifient souvent ces scénarios d’environnements « GNSS » ou « GNSS ».
Le blocage du signal est souvent à l’origine d’une navigation bloquée dans les canyons urbains, les tunnels, les forêts denses ou lors d’opérations sous-marines. Les bâtiments, le relief ou les structures empêchent les satellites d’atteindre le récepteur. Par conséquent, le système ne peut pas calculer une position fiable.
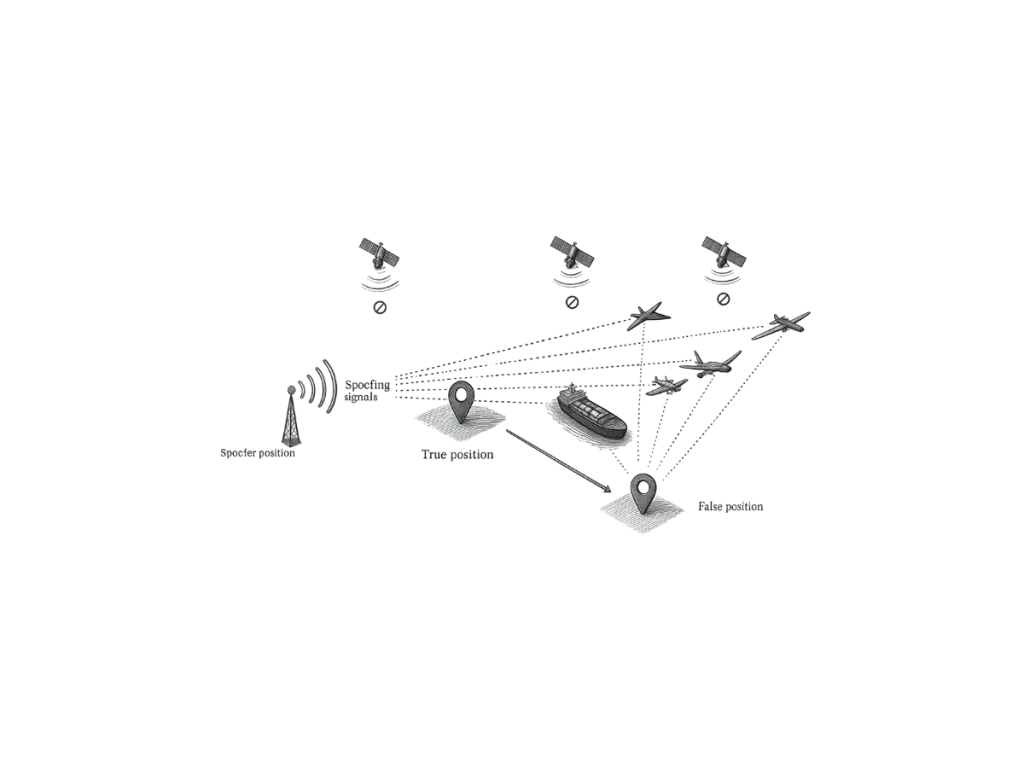
Les interférences et le brouillage dégradent également les performances de navigation. Des signaux radiofréquences, intentionnels ou non, perturbent GNSS . Ces interférences réduisent la qualité du signal et augmentent les erreurs de positionnement. L’usurpation de signal (spoofing) représente une autre menace majeure dans les environnements de navigation dégradés. Des attaquants transmettent GNSS faux GNSS afin d’induire les récepteurs en erreur. Cette manipulation entraîne des informations erronées concernant la position, la vitesse ou la synchronisation.
Solutions pour les environnements où GNSS
Les systèmes de navigation inertielle (INS) constituent une alternative fiable dans les situations où la navigation est impossible ou dégradée. INS des accéléromètres et des gyroscopes pour calculer la position, la vitesse et l’orientation. Ces capteurs fonctionnent indépendamment de tout signal externe. Les ingénieurs intègrent GNSS INS garantir des performances de navigation continues. Lorsque GNSS se dégradent, INS le positionnement grâce à la navigation à l’estime. Cette approche hybride améliore la résilience et la fiabilité.
Cependant, INS dérive au fil du temps en raison des erreurs des capteurs. Les unités de mesure inertielle (IMU) hautes performances réduisent considérablement cette dérive. Des algorithmes de filtrage avancés améliorent également la précision du système en cas de GNSS .
Solutions de navigation avancées pour les environnements critiques
Des applications telles que les véhicules autonomes, les drones et les systèmes de défense reposent sur des solutions de navigation en cas de perte de signal. Ces systèmes nécessitent un positionnement continu et fiable dans des environnements difficiles (navigation à l'estime). Une navigation robuste garantit la réussite des missions et la sécurité opérationnelle.
Pour optimiser les performances, les ingénieurs combinent plusieurs capteurs, notamment des LiDAR, des caméras et des odomètres. Les techniques de fusion de capteurs améliorent la précision et pallient les limites de chaque capteur pris individuellement.
La navigation en cas de perte ou de dégradation du signal reste un défi majeur pour les systèmes de navigation modernes. Des solutions inertielles avancées et des stratégies de fusion de capteurs offrent des alternatives fiables. Ces technologies garantissent un positionnement précis lorsque GNSS sont absents ou dégradés.
