

航行不能または航行能力の低下
「ナビゲーション不能」または「ナビゲーション性能低下」とは、測位システムの精度、可用性、または完全性が失われる環境を指します。これらの状況は、GPS、ガリレオ、その他の衛星コンステレーションを含む、GNSSに影響を及ぼします。エンジニアは、こうした状況をGNSS」またはGNSS」と呼ぶことがよくあります。
信号の遮断は、都市部のビル群、トンネル、鬱蒼とした森林、あるいは水中作業において、ナビゲーション不能を引き起こす一般的な原因です。建物、地形、または構造物が、衛星から受信機への信号到達を妨げます。 その結果、システムは信頼性の高い位置を算出できなくなります。
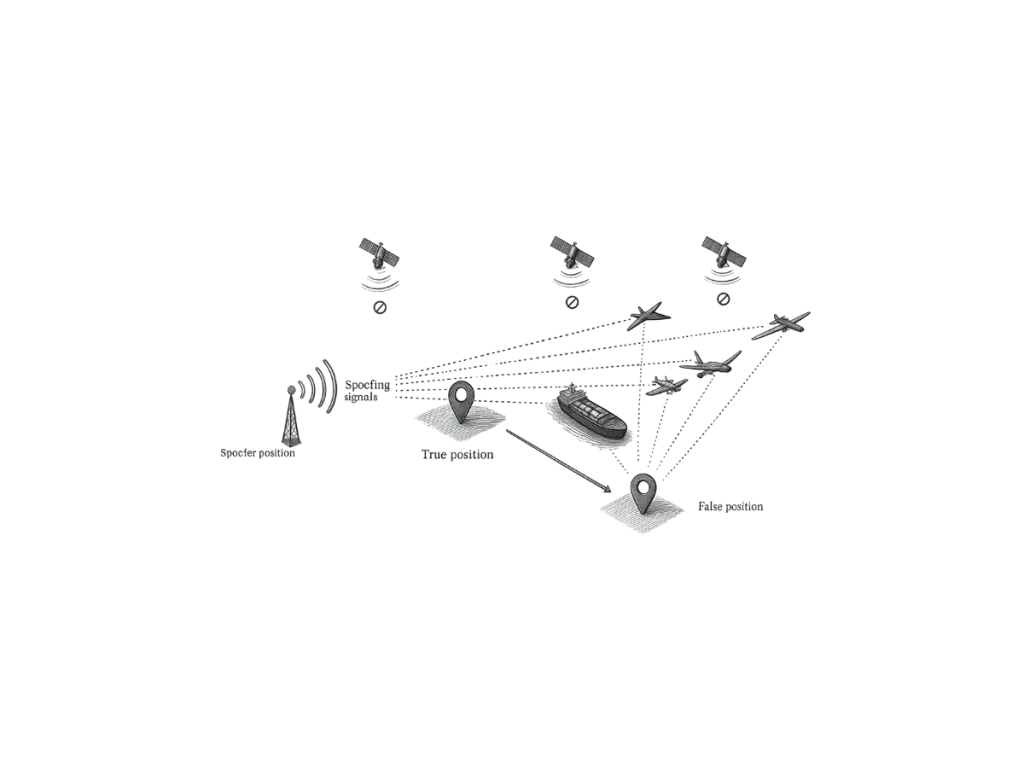
ジャミング ナビゲーション性能を低下させます。意図的または非意図的な無線周波数信号が、GNSS 妨害します。この干渉により、信号品質が低下し、測位誤差が増大します。スプーフィング 、ナビゲーション性能が低下した環境におけるもう一つの重大なスプーフィング 。攻撃者は、受信機を欺くためにGNSS を送信します。この操作により、位置、速度、または時刻に関する誤った情報が生成されます。
GNSS環境における代替手段
慣性航法システム(INS)は、航法情報が得られない、あるいは航法性能が低下した状況において、堅牢な代替手段となります。INS 位置、速度、姿勢を算出します。これらのセンサーは、外部信号とは独立して動作します。エンジニアはGNSS INS 継続的な航法性能INS 。GNSS 低下した場合でも、INS 推測航法によって位置INS 。このハイブリッドなアプローチにより、耐障害性と信頼性が向上します。
しかし、INS 、センサーの誤差により時間の経過とともにドリフトが生じます。 高性能な慣性計測ユニット(IMU)は、このドリフトを大幅に低減します。また、高度なフィルタリングアルゴリズムにより、GNSS 状況下でもシステムの精度が向上します。
ミッションクリティカルな環境向けの高度なナビゲーションソリューション
自動運転車、無人航空機(UAV)、防衛システムなどのアプリケーションは、通信遮断環境下でのナビゲーションソリューションに依存しています。これらのシステムは、過酷な環境下でも継続的かつ信頼性の高い測位(推測航法)を必要とします。堅牢なナビゲーションは、ミッションの成功と運用上の安全性を確保します。
性能を最適化するため、エンジニアはLiDAR、カメラ、走行距離計など、複数のセンサーを組み合わせています。センサーフュージョン技術により、精度が向上し、個々のセンサーの限界が緩和されます。
通信遮断や信号劣化時のナビゲーションは、現代のナビゲーションシステムにおいて依然として重大な課題となっています。 高度な慣性ソリューションとセンサーフュージョン戦略は、信頼性の高い代替手段を提供します。これらの技術は、GNSS 失われたり劣化したりした場合でも、正確な測位を保証します。
