

Keine oder eingeschränkte Navigation
Unter „verhinderter“ oder „eingeschränkter“ Navigation versteht man Umgebungen, in denen Ortungssysteme an Genauigkeit, Verfügbarkeit oder Integrität einbüßen. Diese Bedingungen wirken sich auf die GNSS Navigation aus, darunter GPS, Galileo und andere Satellitenkonstellationen. Ingenieure bezeichnen diese Szenarien häufig als GNSS oder GNSS Umgebungen.
Signalblockaden führen häufig zu einer verhinderten Navigation in städtischen Schluchten, Tunneln, dichten Wäldern oder bei Unterwassereinsätzen. Gebäude, Gelände oder Bauwerke verhindern, dass Satellitensignale den Empfänger erreichen. Infolgedessen kann das System keine zuverlässige Position berechnen.
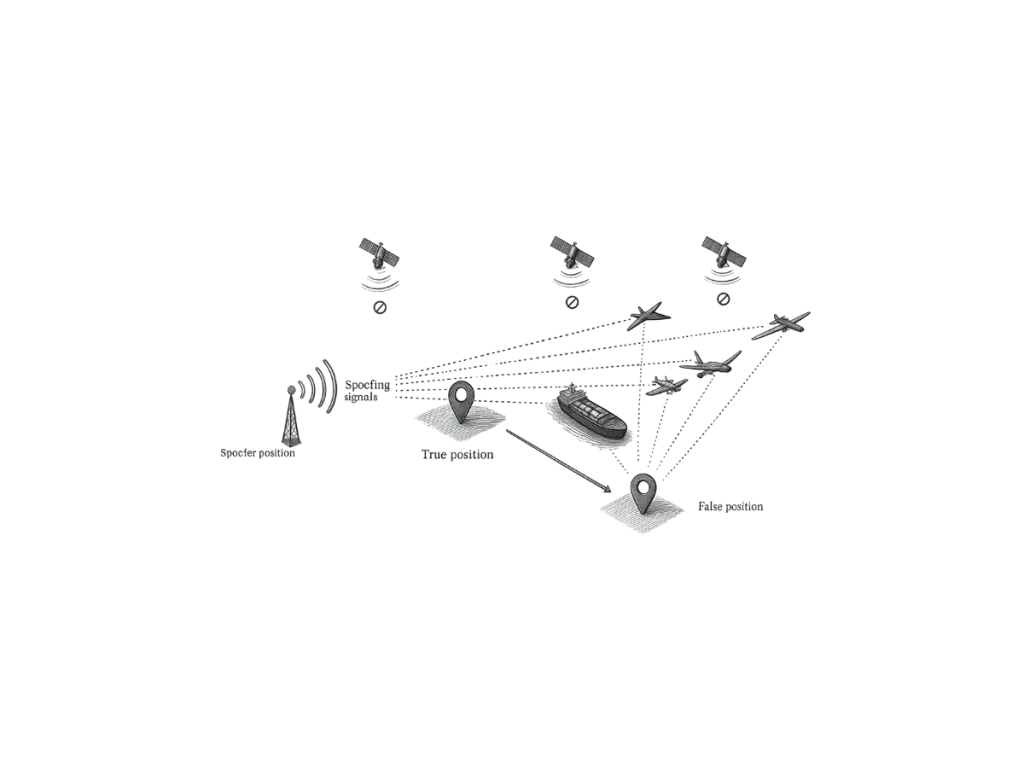
Interferenzen und Störsignale beeinträchtigen ebenfalls die Navigationsleistung. Absichtliche oder unbeabsichtigte Hochfrequenzsignale stören GNSS . Diese Störungen verringern die Signalqualität und erhöhen die Positionsfehler. Spoofing stellt eine weitere kritische Bedrohung in Umgebungen mit beeinträchtigter Navigation dar. Angreifer senden gefälschte GNSS aus, um Empfänger in die Irre zu führen. Diese Manipulation führt zu falschen Positions-, Geschwindigkeits- oder Zeitangaben.
Alternativen für Umgebungen GNSS
Trägheitsnavigationssysteme (INS) bieten eine robuste Alternative in Situationen, in denen die Navigation nicht möglich ist oder nur eingeschränkt funktioniert. INS Beschleunigungsmesser und Gyroskope, um Position, Geschwindigkeit und Ausrichtung zu berechnen. Diese Sensoren arbeiten unabhängig von externen Signalen. Ingenieure integrieren GNSS INS eine kontinuierliche Navigationsleistung zu gewährleisten. Wenn GNSS ausfallen, INS das INS durch Kursschätzung INS die weitere Positionsbestimmung. Dieser hybride Ansatz verbessert die Ausfallsicherheit und Zuverlässigkeit.
Allerdings kommt es im Laufe der Zeit aufgrund von Sensorfehlern zu Abweichungen bei INS . Hochleistungsfähige Trägheitsmesseinheiten (IMUs) reduzieren diese Abweichung erheblich. Fortschrittliche Filteralgorithmen verbessern zudem die Systemgenauigkeit bei GNSS .
Fortschrittliche Navigationslösungen für unternehmenskritische Umgebungen
Anwendungen wie autonome Fahrzeuge, UAVs und Verteidigungssysteme sind auf Navigationslösungen für den Fall eines Signalausfalls angewiesen. Diese Systeme erfordern eine kontinuierliche und zuverlässige Positionsbestimmung in schwierigen Umgebungen (Koppelnavigation). Eine robuste Navigation gewährleistet den Missionserfolg und die Betriebssicherheit.
Um die Leistung zu optimieren, kombinieren Ingenieure mehrere Sensoren, darunter LiDAR, Kameras und Wegstreckenzähler. Techniken der Sensorfusion verbessern die Genauigkeit und gleichen die Einschränkungen einzelner Sensoren aus.
Der Ausfall oder die Beeinträchtigung der Navigation bleibt eine entscheidende Herausforderung für moderne Navigationssysteme. Fortschrittliche Trägheitslösungen und Sensorfusionsstrategien bieten zuverlässige Alternativen. Diese Technologien gewährleisten eine genaue Positionsbestimmung, wenn GNSS ausfallen oder beeinträchtigt sind.
