增强自动驾驶汽车导航
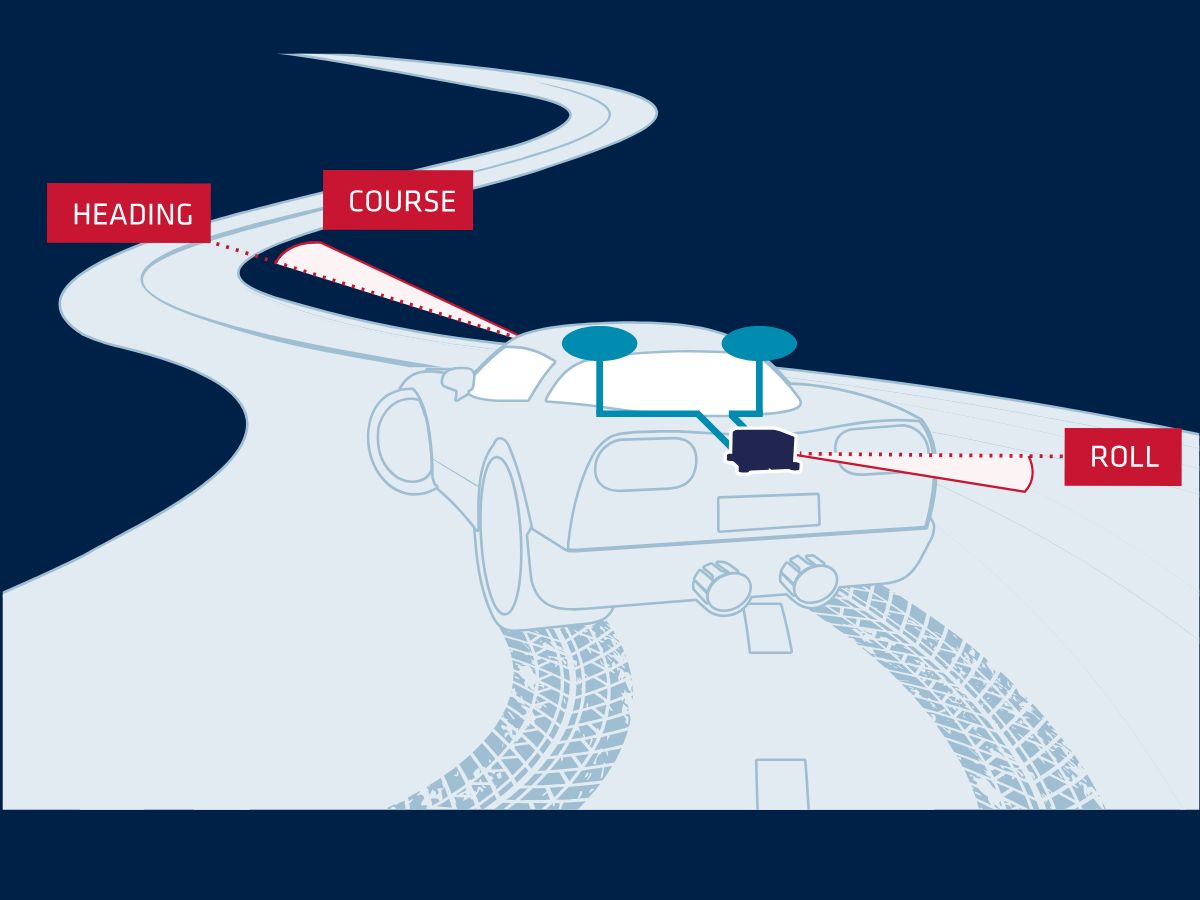
我们的惯性导航系统INS)可提供实时滚动、俯仰和航向精度,并与 GNSS 接收器集成,以便在信号中断(建筑物、树木、隧道等)的情况下保持精度。
惯性传感器还可用于精确同步和稳定附加设备,如无人驾驶汽车应用中的激光雷达或摄像头。INS 传感器与其他传感器的集成有助于全面了解车辆所处的环境,使其能够更精确地导航复杂的动态场景。

提高自动驾驶车辆的安全性和可靠性
对于自动驾驶汽车来说,最具挑战性的环境之一是城市地区,在这些地区,GNSS信号可能会被高层建筑阻挡,并且交通状况可能会迅速变化。INS提供了安全导航这些环境所需的准确性和可靠性。
我们的INS传感器使用微机电系统(MEMS)技术。这使得传感器更小、更精确、更节能,从而提高了INS在自动驾驶汽车中的整体性能。
用于自动驾驶汽车的惯性导航系统
我们的惯性导航系统经过精心设计,可提供在复杂环境(如城市峡谷)中自信导航所需的无与伦比的精度和可靠性。
我们创建了先进的 INS 解决方案,该解决方案可与您的自动驾驶汽车系统无缝集成,提供实时数据,确保精确定位和流畅、准确的控制。从城市街道到具有挑战性的地形,我们为您的自动驾驶汽车技术提供实现安全、可靠和高效的自主运行所需的强大、高性能导航功能。

我们用于自动驾驶汽车的解决方案
与我们一同驱动自动驾驶的未来,创新与精准相遇,每一次旅程都以无与伦比的精度为指导。探索我们用于自动驾驶汽车导航的解决方案。

Ellipse-D

Ekinox Micro

Ekinox-D
自主应用手册
将我们的产品手册直接发送到您的收件箱!
案例分析
在我们的案例研究部分,了解我们的惯性技术如何重塑自动驾驶汽车的格局。这些真实的案例展示了我们的先进传感器如何在最严苛的条件下实现精确导航和强大的性能。
无论是在复杂的城市环境中提高安全性,还是在 GNSS 信号不可用时确保最佳功能,我们的解决方案都能为自动驾驶汽车提供卓越的准确性和控制力。



他们在谈论我们
直接听取已采用我们技术的创新者和客户的意见。
他们的评价和成功案例说明了我们的传感器在实际自动驾驶车辆应用中的重大影响。
探索自动驾驶车辆的其他潜在应用
自动驾驶车辆正在改变运输以外的众多行业。从农业和物流到建筑和监控,先进的导航技术正在实现更智能、更安全和更高效的运营。探索由自主技术支持的各种创新应用。
您有疑问吗?
查找关于我们展示的应用的最常见问题的答案。如果您没有找到您要找的答案,请随时直接联系我们!
自动驾驶汽车如何工作?
自动驾驶汽车是配备了复杂系统的车辆,这些系统使其能够在没有人为干预的情况下进行导航和控制。这些车辆使用自主驾驶传感器和算法相结合的方式来感知环境、做出决策和执行自动驾驶任务。 目标是实现完全自主,使车辆能够安全有效地处理驾驶的各个方面。
自动驾驶汽车依赖于一系列关键技术来感知周围环境。 这些包括:
- GNSS(全球导航卫星系统):用于获取自驾驶汽车的位置、速度和方向的实时更新。
- INS(惯性导航系统):在 GNSS 信号中断的情况下保持精度。它提供关于自动驾驶汽车位置、速度和方向的实时更新。
- LiDAR(激光探测与测距):使用激光束创建车辆环境的详细 3D 地图。 这项技术有助于汽车检测和测量周围的物体,包括其他车辆、行人和道路标志。
- 雷达(无线电探测和测距):利用无线电波探测物体的速度、距离和方向。雷达在恶劣天气条件下以及探测远距离物体时尤其有用。
- 相机:用于捕获有关车辆环境的视觉信息,包括车道标线、交通信号和道路标志。它们对于解释复杂的视觉线索和根据视觉数据做出决策至关重要。
汽车中的 ADAS 和自动驾驶汽车之间有什么区别?
ADAS(高级驾驶辅助系统) 通过提供车道保持、自适应巡航控制和自动制动等功能来增强驾驶安全性,但需要驾驶员主动监督。相比之下,配备自动驾驶系统的自动驾驶汽车旨在完全自动化车辆操作,无需人工干预。
ADAS通过辅助驾驶员完成任务和提高安全性来支持驾驶员,而自动驾驶汽车旨在处理自动驾驶的各个方面,从导航到决策,提供更高级别的自动化(SAE等级)和便利性。ADAS的特性或功能归因于低于3级的SAE等级,因此自动驾驶汽车对应于最低4级。