




Stellar-40 Taktyczny system nawigacji inercyjnej
Stellar to taktyczny system nawigacji inercyjnej GNSS, oparty na platformie SAF2Nav, zapewniającej niezrównaną niezawodność. Łączy on w sobie taktyczny moduł IMU, odporny na zakłócenia i fałszywe sygnały GNSS oraz zaawansowane algorytmy fuzji danych z czujników, a wszystko to w wytrzymałej obudowie.
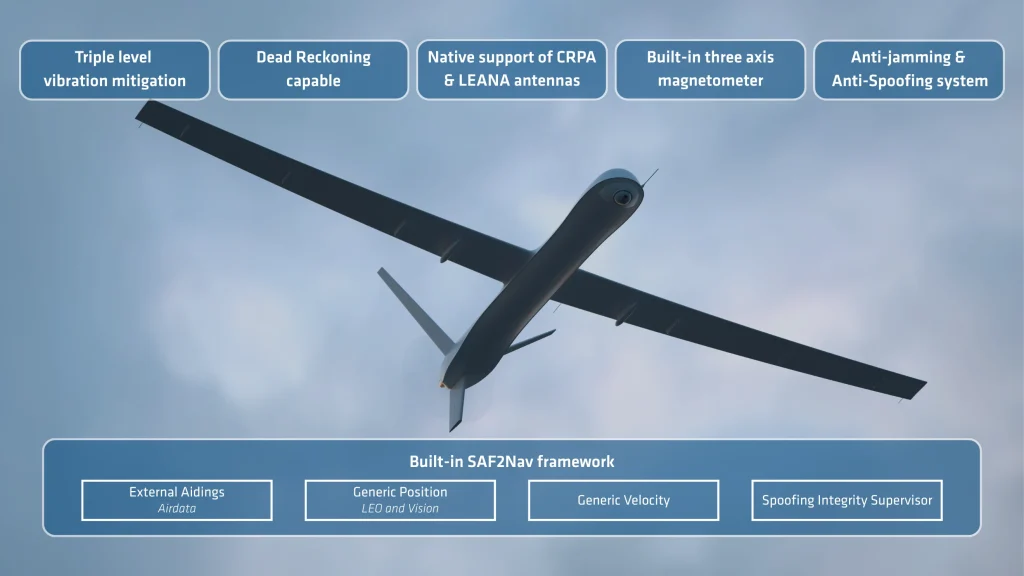
Łącząc wysoką wydajność z przemysłową elastycznością, Stellar posiada unikalną trójwarstwową architekturę tłumienia drgań w konstrukcji zoptymalizowanej pod kątem skalowalności, spełniając rygorystyczne wymagania produkcji seryjnej.
Wraz z tą premierą SBG Systems rozszerza swoje portfolio rozwiązań nawigacji inercyjnej dostosowanych do zastosowań o znaczeniu krytycznym. Stellar jest zgodny z ITAR.
Stellar-40
Nasz Stellar to pierwszy model z nowej Stellar , wprowadzonej w celu sprostania zmieniającym się wymaganiom operacyjnym. Ten taktyczny INS na dwóch głównych celach: zwiększeniu odporności w trudnych warunkach operacyjnych oraz zapewnieniu skalowalności bez utraty wydajności.
Aby sprostać wyzwaniom związanym z silnymi wibracjami, SBG Systems arcydzieło inżynierii mechanicznej: unikalny, trójwarstwowy system ochrony przed wibracjami. Przeprowadzono kompleksową analizę modalną, aby zapewnić solidność i niezawodność produktu, zachowując jednocześnie niezwykle prostą konstrukcję.
Gotowy do nawigacji metodą nawigacji zliczeniowej z silnikiem SAF2Nav w sercu, Stellar płynnie integruje się z Twoją platformą, zapewniając niezawodną nawigację nawet w najtrudniejszych warunkach GNSS.
Poznaj wszystkie funkcje!




Stellar-40 w skrócie
Wytrzymały. Precyzyjny. Bezproblemowy.
Zapoznaj się z kluczowymi funkcjami poniżej, aby dowiedzieć się więcej o Stellar-40.
Arcydzieło inżynierii mechanicznej
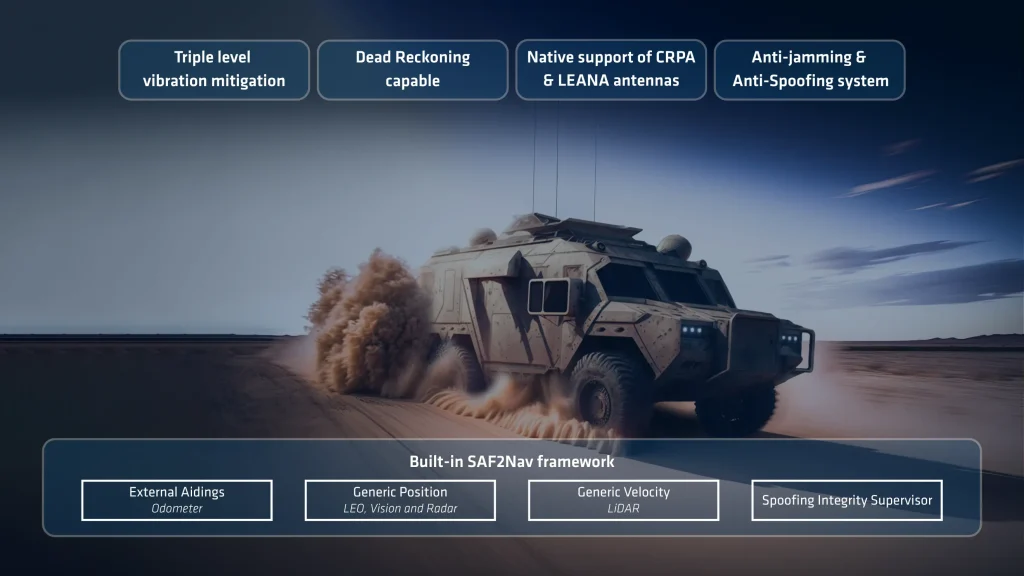
Wibracje są wrogiem precyzji, dlatego nasz INS trójstopniowy system tłumienia drgań. Nasza unikalna konstrukcja mechaniczna izoluje czujniki poprzez trzy odrębne etapy, aby zapewnić maksymalną dokładność. Pierwszy etap obejmuje tłumienie IMU, zapewniające tłumienie wewnętrzne bezpośrednio na poziomie czujnika. Drugi etap wykorzystuje zoptymalizowaną konstrukcję obudowy, wyposażoną w obudowę opracowaną na podstawie analizy modalnej w celu wyeliminowania rezonansu i zmniejszenia drgań wywołanych przez samą obudowę. Wreszcie trzeci etap wykorzystuje izolację zewnętrzną poprzez zewnętrzne tłumiki, aby mechanicznie oddzielić urządzenie od konstrukcji pojazdu.
Odporny stos nawigacyjny z SAF2Nav
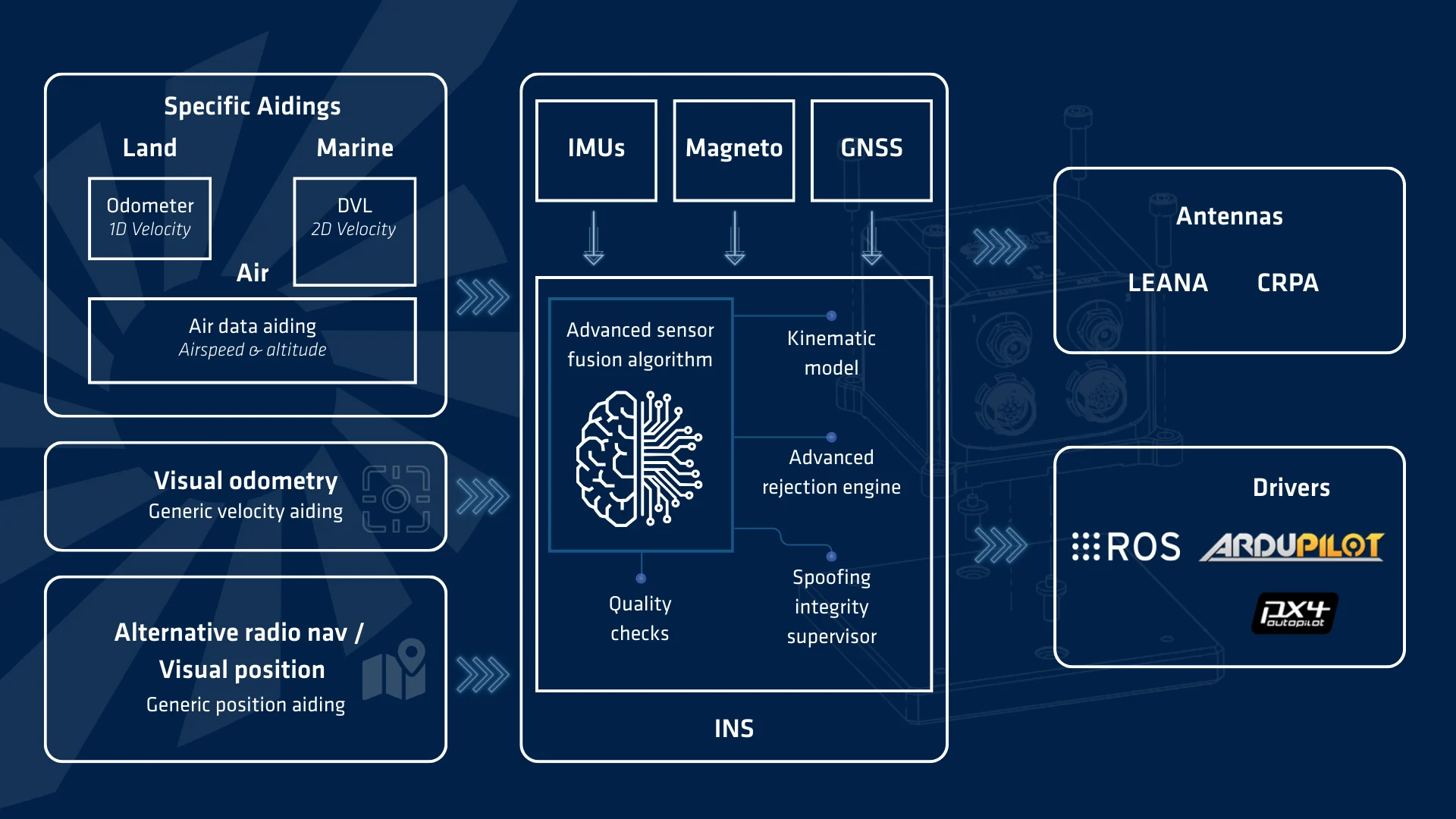
GNSS nie GNSS już czymś oczywistym. Dlatego nasz stos SAF2Nav stanowi serce naszego INS, zapewniając dokładność i bezpieczeństwo w przypadku GNSS lub ataku GNSS . Opiera się on na trzech kluczowych filarach. Po pierwsze, fuzja wielu czujników łączy dane GNSS, IMU, powietrzne, radarowe i wizyjne w jedno spójne rozwiązanie nawigacyjne. Po drugie, nowy nadzorca integralności spoofingu monitoruje czujniki w celu natychmiastowego wykrywania anomalii, co znacznie skraca krytyczny czas ostrzegania. Wreszcie, adaptacyjne modele kinematyczne maksymalizują dokładność nawigacji, umożliwiając algorytmowi fuzji płynne dopasowanie się do konkretnej dynamiki ruchu platformy.
Wbudowane narzędzie do monitorowania drgań
Monitorowanie wibracji w celu zrozumienia i złagodzenia rezonansów strukturalnych rzadko jest proste i często wymaga dedykowanego zewnętrznego sprzętu. Dlatego zintegrowaliśmy kompleksowe narzędzia monitorujące bezpośrednio z systemem Stellar-40 INS. System wyposażony jest w dedykowany akcelerometr o wysokiej przepustowości, działający do 16 kHz, w połączeniu z zaawansowanymi możliwościami przetwarzania pokładowego. Zapewnia on wizualizację w czasie rzeczywistym wartości RMS, amplitudy szczytowej i częstotliwości szczytowej w czterech różnych pasmach częstotliwości, umożliwiając użytkownikom precyzyjne określenie, gdzie występują krytyczne wibracje. Ponadto, te cenne dane są bezproblemowo rejestrowane i ponownie wykorzystywane do późniejszej, dogłębnej analizy FFT.

Kompatybilność ekosystemu
Wydajny system nawigacyjny jest tak dobry, jak jego zdolność do płynnej integracji z architekturą użytkownika. Dlatego kompatybilność ekosystemowa jest fundamentalnym filarem naszego INS, zaprojektowana przyspieszenia wdrażania i wyeliminowania kosztów integracji. Po pierwsze, system jest w pełni wyposażony w gotowe do użycia sterowniki oferujące natywną obsługę standardowych platform autonomicznych, w tym ROS2, ArduPilot i PX4. Po drugie, aby zagwarantować maksymalną odporność w trudnych warunkach, zapewnia bezpośrednią kompatybilność typu plug-and-play z zaawansowanymi antenami CRPA. Ta głęboka interoperacyjność zapewnia łatwe wdrożenie na wszystkich krytycznych platformach.
Przegląd możliwości misji i wyników
Stworzony z myślą o każdej misji
Sprawdź, jak produkt sprawdza się w różnych środowiskach operacyjnych. W każdej sekcji przedstawiono zalety istotne z punktu widzenia misji oraz kluczowe parametry techniczne.
Skuteczność misji powietrznych
- Nawigacja bezzałogowych statków powietrznych: platformy o skrzydłach stałych i wirnikowe
- Nawigacja bezzałogowych statków powietrznych: platformy o skrzydłach stałych i wirnikowe
Opis funkcji misji
System ten, zaprojektowany z myślą o wymagających misjach powietrznych, łączy w sobie wytrzymałość, precyzję oraz płynną integrację z platformami o skrzydłach stałych i obrotowych.
- Specjalne profile dynamiczne dostosowane do platform stałopłatowych i śmigłowcowych.
- Trójwarstwowa izolacja drgań przeznaczona do środowisk charakteryzujących się silnymi drganiami przenoszonymi przez powietrze.
- Niezawodność pozycjonowania w warunkach GNSS i fałszowania sygnałów GNSS , zapewniona przez stos SAF2Nav.
- Taktyczne nawigowanie metodą przybliżoną oparte na pakiecie SAF2Nav, zapewniające ciągłą nawigację w przypadku GNSS .
- Automatyczne oszacowanie prędkości wiatru i kompensacja w integracji czujnika Pitota.
- Płynna integracja autopilota dzięki naszym sterownikom PX4 i ArduPilot.
Wyniki misji lądowych
- Nawigacja lądowa: pojazdy drogowe i terenowe
- Nawigacja lądowa: pojazdy drogowe i terenowe
Opis funkcji misji
System ten, zaprojektowany z myślą o wymagających misjach z wykorzystaniem pojazdów lądowych, łączy w sobie wytrzymałość, precyzję oraz możliwość płynnej integracji z każdym rodzajem pojazdu lądowego.
- Specjalne profile dynamiczne dostosowane do pojazdów terenowych lub drogowych.
- Trójwarstwowa izolacja drgań do zastosowań w środowiskach o wysokim poziomie drgań.
- Niezawodność pozycjonowania w warunkach GNSS i fałszowania sygnałów GNSS , zapewniona przez stos SAF2Nav.
- Dane z licznika obrotów kół i prędkości zamykania klapy w celu poprawy dokładności nawigacji zliczeniowej
- Taktyczne nawigowanie metodą przybliżoną oparte na pakiecie SAF2Nav, zapewniające ciągłą nawigację w przypadku GNSS .
Wydajność nawigacji powierzchniowej
- Nawigacja morska: statki powierzchniowe wszelkich rozmiarów, zarówno załogowe, jak i bezzałogowe
- Nawigacja morska: statki powierzchniowe wszelkich rozmiarów, zarówno załogowe, jak i bezzałogowe
Opis funkcji misji
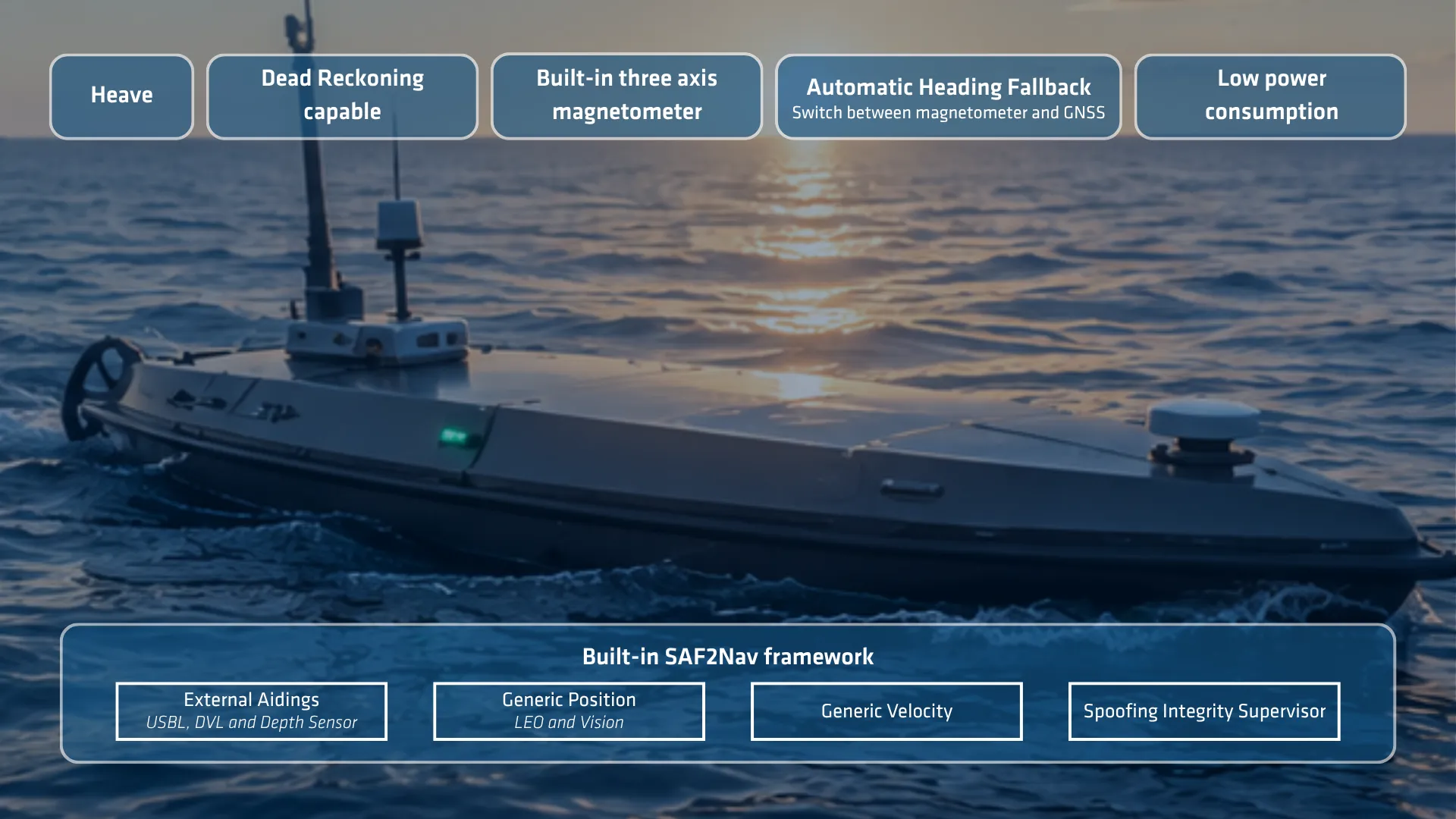
System ten, zaprojektowany z myślą o wymagających misjach morskich, łączy w sobie wytrzymałość, precyzję oraz możliwość płynnej integracji z dowolnym typem okrętu nawodnego.
- Specjalne profile dynamiczne dostosowane do morskich pojazdów powierzchniowych.
- Trójwarstwowa izolacja drgań do zastosowań w środowiskach o wysokim poziomie drgań.
- Niezawodność pozycjonowania w warunkach GNSS i fałszowania sygnałów GNSS , zapewniona przez stos SAF2Nav.
- Dane dotyczące prędkości DVL lub prędkości w jeziorze w celu poprawy dokładności nawigacji zliczeniowej
- Automatyczne szacowanie aktualnej prędkości oraz kompensacja prędkości toru wodnego.
- Taktyczne nawigowanie metodą przybliżoną oparte na pakiecie SAF2Nav, zapewniające ciągłą nawigację w przypadku GNSS .
Specyfikacje
Kompatybilność z pojazdami
Statki nawodne, pojazdy podwodne, badania morskie, środowisko morskie i trudne warunki morskie Air
Samoloty, helikoptery, statki powietrzne, UAV Land
Samochody, motoryzacja, pociągi/koleje, ciężarówki, pojazdy dwukołowe, maszyny ciężkie, piesi, plecaki, teren
Wydajność GNSS
Podwójna antena, 789 kanałów GNSS
500 m/s i wysokość 80 km Zakres częstotliwości
Wieloczęstotliwościowy Funkcje GNSS
SBAS, RTK, PPK, RAW Sygnały GPS
L1C/A, L1C, L2C, L2PY, L5 Sygnały Galileo
E1, E5a, E5b, E6BC Sygnały Glonass
L1C/A, L2C/A, L2P, L3OC Sygnały Beidou
B1I, B1C, B2a, B2I, B3I, B2b Inne sygnały
NaviC L5, pasmo L, QZSS Czas ustalenia pozycji GNSS (time to first fix)
< 35 s Zakłócanie i spoofing
Automatyczna ochrona przed zakłóceniami i fałszowaniem, OSNMA, zaawansowana automatyczna eliminacja wielu czujników
Specyfikacje środowiskowe i zakres roboczy
IP-65 Temperatura pracy
Od -40 °C do 71 °C Wibracje
3 g RMS – 20 Hz do 2 kHz Wstrząsy
500 g przez 0,3 ms MTBF (obliczony)
246 000 godzin Zgodność z
MIL-STD 461G | MIL-STD 1275E | MIL-STD 810H
Interfejsy
GNSS, RTCM, NTRIP, dane lotnicze, licznik przebiegu, ogólne dane dotyczące prędkości i położenia Protokoły output
NMEA, ASCII, sbgECom (binarny), REST API Protokoły Input
NMEA, ASCII, sbgECom (binarny), REST API Datalogger
8 GB lub 48 h @ 200 Hz Output rate
200 Hz (IMU, INS) Porty szeregowe
4x szeregowe wejścia/wyjścia do 921 600 bps CAN
1x magistrala CAN 2.0 A/B, do 1 Mb/s Sync OUT
2x wyjście synchronizacji (1x RS232 + 1x poziomy TTL) Sync IN
4 wejścia synchronizacji (poziomy RS232) Ethernet
1x Ethernet pełny dupleks (10/100 base T) PTP / NTP, NTRIP, interfejs internetowy, FTP Złącza
2x Micro 15 (wejścia/wyjścia) 2x złącza SMA (anteny)
Specyfikacje mechaniczne i elektryczne
Od 9 do 36 VDC Pobór mocy
< 3 W without antennas Waga (g)
365 g / 443 g z tłumikiem Wymiary (dł. x szer. x wys.)
81 mm x 130 mm x 40 mm
Specyfikacje czasowe
< 200 ns Dokładność PTP
< 1 µs Dokładność PPS
< 1 µs (jitter < 1 µs) Dryf w Nawigacji Zliczeniowej
1 ppm
Karta katalogowa Stellar-40
Otrzymaj wszystkie cechy produktu i specyfikacje dostarczone prosto do Twojej skrzynki odbiorczej!
Porównaj Stellar-40 z innymi produktami
Możesz śmiało porównać naszą najbardziej zaawansowaną inercyjną gamę czujników do nawigacji, ruchu i wykrywania kołysania. Pełne specyfikacje można znaleźć w instrukcji obsługi sprzętu dostępnej na żądanie.
-

Stellar-40
- Pozycja poziomaSingle point
- 1.2 m
- Ocena skuteczności technik spoofingu i zakłócania
- ★★★★★
- Odporność na spoofing i zakłócanie
- Wszystkie konstelacje, pełny zakres częstotliwości, zaawansowane monitorowanie i ograniczanie zakłóceń
- Odporność na wibracje
- Trzypoziomowy
- Nawigacja z wyliczeń
- Dokładność do 0,2% DT (pojazd drogowy, podwójna antena GNSS licznik przebiegu)
- Waga (g)
- 365 g
- Wymiary (dł. x szer. x wys.)
- 81 × 130 × 40 mm
-
- Pozycja poziomaSingle point
- 1.2 m
- Ocena skuteczności technik spoofingu i zakłócania
- ★★★☆☆
- Odporność na spoofing i zakłócanie
- Wszystkie konstelacje, dwupasmowość, monitorowanie i ograniczanie skutków
- Odporność na wibracje
- Jeden poziom
- Nawigacja z wyliczeń
- Dokładność do 0,2% DT (pojazd drogowy, podwójna antena GNSS licznik przebiegu)
- Waga (g)
- 165 g
- Wymiary (dł. x szer. x wys.)
- 42 × 57 × 60 mm
-
- Pozycja poziomaSingle point
- 1.0 m
- Ocena skuteczności technik spoofingu i zakłócania
- ★★★☆☆
- Odporność na spoofing i zakłócanie
- Wszystkie konstelacje, potrójny pasmo, zaawansowane monitorowanie i ograniczanie skutków
- Odporność na wibracje
- Jeden poziom
- Nawigacja z wyliczeń
- < 0.1 % DT (Onroad vehicle, dual antenna GNSS and odometer)
- Waga (g)
- < 900 g
- Wymiary (dł. x szer. x wys.)
- 130 × 100 × 75 mm
-
- Pozycja poziomaSingle point
- 1.2 m
- Ocena skuteczności technik spoofingu i zakłócania
- ★★★☆☆
- Odporność na spoofing i zakłócanie
- Wszystkie konstelacje, dwupasmowość, monitorowanie i ograniczanie skutków
- Odporność na wibracje
- Jeden poziom
- Nawigacja z wyliczeń
- Dokładność DT na poziomie 0,5% (pojazd drogowy, podwójna antena GNSS licznik przebiegu)
- Waga (g)
- 65 g
- Wymiary (dł. x szer. x wys.)
- 46 × 45 × 32 mm



Kompatybilność
Kompatybilny wybór anten przeciwzakłóceniowych i spoofingowych
Wybraliśmy optymalny asortyment anten przeciwzakłóceniowych i przeciwfałszerskich, które zostały w pełni przetestowane i sprawdzone pod kątem kompatybilności. Asortyment ten obejmuje sprawdzone technologie, takie jak CRPA (Controlled Reception Pattern Antenna) i LEANA (Low-Elevation Anti-Jam Navigation Antenna).
Zapoznaj się z naszymi rekomendowanymi rozwiązaniami!







Dokumentacja i zasoby
Stellar-40 jest dostarczany z kompleksową dokumentacją online, zaprojektowaną, aby wspierać użytkowników na każdym kroku.
Od przewodników instalacji po zaawansowaną konfigurację i rozwiązywanie problemów, nasze jasne i szczegółowe instrukcje zapewniają płynną integrację i działanie.
Nasze studia przypadków
Zapoznaj się z rzeczywistymi przykładami zastosowań, które pokazują, w jaki sposób nasze rozwiązania zwiększają wydajność, ograniczają przestoje i poprawiają efektywność operacyjną. Dowiedz się, w jaki sposób nasze zaawansowane czujniki i intuicyjne interfejsy zapewniają precyzję i kontrolę niezbędną do osiągnięcia doskonałych wyników w Twoich zastosowaniach.






Dodatkowe produkty i akcesoria
Odkryj, jak nasze rozwiązania mogą zrewolucjonizować Twoją działalność, poznając naszą różnorodną gamę zastosowań. Dzięki naszym czujnikom ruchu i nawigacji oraz oprogramowaniu uzyskujesz dostęp do najnowocześniejszych technologii, które napędzają sukces i innowacje w Twojej dziedzinie.
Dołącz do nas, aby odblokować potencjał nawigacji inercyjnej i rozwiązań pozycjonowania w różnych branżach.
Qinertia GNSS-INS

Kable

Anteny GNSS
Proces produkcji
Odkryj precyzję i wiedzę fachową, które kryją się za każdym produktem SBG Systems, takim jak IMU, AHRS lub INS. Poniższy film oferuje wgląd w to, jak skrupulatnie projektujemy, produkujemy i testujemy nasze wysokowydajne systemy nawigacji inercyjnej. Od zaawansowanej inżynierii po rygorystyczną kontrolę jakości, nasz proces produkcyjny zapewnia, że każdy produkt spełnia najwyższe standardy niezawodności i dokładności.
Obejrzyj teraz, aby dowiedzieć się więcej!

Zapytaj o wycenę
Oni o nas mówią
Prezentujemy doświadczenia i opinie profesjonalistów z branży oraz klientów, którzy wykorzystali nasze produkty w swoich projektach.
Ich spostrzeżenia odzwierciedlają jakość i wydajność, które charakteryzują nasz INS, podkreślając jego rolę jako sprawdzonego rozwiązania w tej dziedzinie.
Dowiedz się, jak nasza innowacyjna technologia zmieniła ich działalność, zwiększyła wydajność i zapewniła niezawodne wyniki w różnych zastosowaniach.
Sekcja FAQ
Witamy w naszej sekcji FAQ, w której odpowiadamy na najczęściej zadawane pytania dotyczące naszej najnowocześniejszej technologii i jej zastosowań. Znajdziesz tutaj wyczerpujące odpowiedzi dotyczące funkcji produktu, procesów instalacji, wskazówek dotyczących rozwiązywania problemów i najlepszych praktyk, aby zmaksymalizować korzyści z naszego kompaktowego INS. Niezależnie od tego, czy jesteś nowym użytkownikiem szukającym wskazówek, czy doświadczonym profesjonalistą poszukującym zaawansowanych informacji, nasze FAQ zostały zaprojektowane, aby zapewnić potrzebne informacje.
Znajdź odpowiedzi tutaj!
Czym jest nawigacja zliczeniowa w żeglarstwie?
Nawigacja zliczeniowa to metoda nawigacji bez GNSS , polegająca na wykorzystaniu danych z czujników inercyjnych i innych czujników w celu utrzymania ciągłego śledzenia. Zazwyczaj w przypadku GNSS system całkowicie traci swoją pozycję. Dzięki nawigacji zliczeniowej system oblicza ciągłą pozycję, która z czasem ulega powolnemu dryfowi. Tempo tego dryfu zależy od jakości wewnętrznego modułu IMU dostępności zewnętrznych czujników wspomagających.
Jakie formaty są obsługiwane w przypadku pomocy zewnętrznej (np. dane lotnicze, wizja)?
Stellar-40 wykorzystuje nasz autorski protokół sbgECom, który posługuje się jasno zdefiniowanymi ramkami wiadomości. Korzystając z tych predefiniowanych wiadomości, system może bezproblemowo pobierać dane lotnicze (airdata), prędkości ciała i dane absolutnej pozycji z dowolnego zewnętrznego czujnika zdolnego do dostarczenia tych informacji.
Czy istnieje specjalne pole, w którym można ręcznie wprowadzić szacunkową prędkość wiatru?
Nie, ponieważ nie jest to wymagane. Zaawansowany algorytm fuzji sensorów Stellar-40 automatycznie oblicza i szacuje warunki wiatrowe w czasie rzeczywistym, eliminując potrzebę ręcznego wprowadzania danych.
Jakie opcje pomocy zewnętrznej są dostępne dla zastosowań lądowych?
Dla platform lądowych, Stellar-40 obsługuje różnorodne wejścia wspomagające w celu poprawy dokładności nawigacji, zwłaszcza w środowiskach z brakiem sygnału GNSS. Obejmują one odometry sprzętowe (odometria kół), wspomaganie prędkości z zewnętrznych czujników (takich jak LiDAR lub czujniki optyczne) oraz wspomaganie pozycji absolutnej.
Jak wybrać między wersjami tłumionymi a nietłumionymi Stellar-40?
Właściwy wybór zależy od środowiska pracy. Zdecydowanie zalecamy wersję z tłumieniem dla platform narażonych na trudne warunki i wibracje, takich jak drony głębokiego uderzenia lub bezzałogowe pojazdy naziemne (UGV). Jeśli nie masz pewności, która wersja jest odpowiednia dla Twojej aplikacji, nasz zespół pomocy technicznej chętnie pomoże Ci dokonać właściwego wyboru.
Czym jest SBAS?
Czym jest SBAS?
System wspomagania satelitarnego (SBAS) to technologia GNSS , która poprawia dokładność, integralność, dostępność i ciągłość pozycjonowania satelitarnego. Początkowo opracowany z myślą o lotnictwie, system SBAS stał się cennym narzędziem nawigacyjnym w takich zastosowaniach, jak bezzałogowe statki powietrzne (UAV), nawigacja morska, rolnictwo precyzyjne, mapowanie GIS, pojazdy autonomiczne oraz inercjalne systemy nawigacyjne (INS). W przeciwieństwie do nawigacji kinematycznej w czasie rzeczywistym (RTK) czy precyzyjnego pozycjonowania punktowego (PPP), system SBAS zapewnia bezpłatne pozycjonowanie z dokładnością do metra bez konieczności korzystania z lokalnej stacji bazowej lub połączenia z Internetem.
Samodzielny GNSS określa swoją pozycję poprzez pomiar pseudoodległości od satelitów należących do konstelacji takich jak GPS, Galileo, GLONASS czy BeiDou. Na pomiary te wpływa jednak kilka źródeł błędów, w tym dryft zegara satelitarnego, błędy orbity (efemerydy), opóźnienie jonosferyczne, opóźnienie troposferyczne, szum odbiornika oraz rozpraszanie wielodrożne. System SBAS na bieżąco szacuje największy z tych błędów i nadaje w czasie rzeczywistym poprawki, które znacznie poprawiają dokładność pomiaru pozycji.
Architektura SBAS opiera się na sieci precyzyjnie pomiarowych stacji referencyjnych rozmieszczonych na danym obszarze. Stacje te nieustannie monitorują GNSS i porównują zmierzone odległości do satelitów z ich znanymi pozycjami w celu oszacowania błędów związanych z zegarem satelity, jego orbitą oraz jonosferą. Pomiary są przesyłane do głównych centrów kontroli, które łączą dane ze wszystkich stacji referencyjnych w celu wygenerowania komunikatów korekcyjnych oraz informacji o integralności. Komunikaty te są następnie przesyłane do satelitów geostacjonarnych, które retransmitują je do GNSS obsługujących system SBAS. Odbiornik stosuje korekty przed obliczeniem swojej pozycji, skutecznie ograniczając dominujące źródła błędów wpływające na pomiary pseudoodległości.
Z matematycznego punktu widzenia skorygowaną pseudoodległość można wyrazić w następujący sposób:
Ppoprawiono = Pzmierzone − Δzegar − Δorbita − Δjono
gdzie Pmierzone to pierwotny pomiar pseudoodległości, Δzegar oznacza korektę zegara satelitarnego, Δorbit oznacza korektę orbitalną, a Δiono oznacza korektę opóźnienia jonosferycznego.
Korekty te zazwyczaj zmniejszają błędy pozycjonowania GNSS działającym samodzielnie z około 3–10 metrów do około 1–2 metrów. Chociaż ten poziom dokładności jest niższy niż dokładność rzędu centymetrów osiągana w systemach RTK lub PPP, SBAS oferuje istotną zaletę: monitorowanie integralności. Zamiast jedynie poprawiać dokładność pozycjonowania, SBAS na bieżąco ocenia stan każdego monitorowanego satelity i szybko ostrzega użytkowników, jeśli satelita stanie się niewiarygodny z powodu anomalii zegara, błędów orbitalnych lub pogorszenia jakości sygnału. Ta funkcja ma kluczowe znaczenie w zastosowaniach o krytycznym znaczeniu dla bezpieczeństwa, w których użytkownicy muszą mieć pewność, że rozwiązanie nawigacyjne jest godne zaufania.
Na całym świecie działa kilka regionalnych usług SBAS. Należą do nich: WAAS w Ameryce Północnej, EGNOS w Europie, MSAS w Japonii, GAGAN w Indiach, SDCM w Rosji, KASS w Korei Południowej oraz SouthPAN w Australii i Nowej Zelandii. Nowoczesne wieloczęstotliwościowe odbiorniki GNSS zazwyczaj automatycznie obsługują wiele usług SBAS, w zależności od położenia geograficznego.
W przypadku inercyjnych systemów nawigacyjnych SBAS zapewnia dokładniejszy i bardziej wiarygodny GNSS , co poprawia wydajność fuzji czujników. Rozszerzony filtr Kalmana (EKF) wykorzystuje skorygowane pomiary GNSS i prędkości GNSS do okresowego ograniczania dryftu kumulowanego przez czujniki inercyjne. W porównaniu z samodzielnym GNSS, SBAS zmniejsza szum pomiarowy i odchylenia związane z satelitami, co skutkuje bardziej stabilnymi aktualizacjami pozycji i prędkości, dostarczając jednocześnie cenne informacje o integralności dla algorytmów nawigacyjnych. Jednak SBAS nie zwiększa częstotliwości GNSS i nie jest w stanie zrekompensować GNSS . Podczas przerw w sygnale ogólna wydajność nawigacji nadal zależy przede wszystkim od jakości IMU skuteczności algorytmu INS .
SBAS stanowi zatem doskonałe rozwiązanie dla zastosowań wymagających bezpłatnego, dostępnego na całym świecie pozycjonowania z dokładnością do metra, charakteryzującego się wysoką niezawodnością i integralnością. System ten nadaje się szczególnie dobrze do pojazdów autonomicznych, bezzałogowych statków powietrznych (UAV), nawigacji morskiej, rolnictwa oraz systemów przemysłowych, w których solidna nawigacja ma większe znaczenie niż osiągnięcie dokładności na poziomie centymetra. Gdy zastosowania wymagają pozycjonowania na poziomie geodezyjnym, preferowanymi technikami korekcji pozostają RTK lub PPP, podczas gdy SBAS stanowi niezawodne i powszechnie dostępne uzupełnienie konwencjonalnej GNSS .
