Ellipse-D napędza autonomiczną ciężarówkę
Autonomiczna ciężarówka z niezależnym napędem kół i układem kierowniczym.
“Ellipse-D firmy SBG Systems był łatwy w użyciu, bardzo dokładny i stabilny, a jego niewielkie rozmiary były niezbędne do rozwoju naszego WATonoTruck.” | Amir K., Profesor i Dyrektor, Uniwersytet Waterloo

Wszyscy wiemy, że wypadki drogowe zdarzają się z powodu błędów kierowców, niekorzystnych warunków pogodowych lub awarii pojazdów. Ale co, jeśli moglibyśmy sprawić, by pojazdy jeździły same, unikając tych wypadków? Na przykład, autonomiczna ciężarówka lub samochód.
Taka jest idea pojazdów autonomicznych, a Mechatronic Vehicle Systems (MVS) Lab na Uniwersytecie Waterloo pracuje nad projektem o nazwie WATonoTruck (WATerloo autonomous Truck).
Jest to autonomiczna ciężarówka z platformą, zaprojektowana do transportu ciężkich materiałów, rolnictwa i zastosowań serwisowych. Wykorzystuje zaawansowane metody sterowania do analizy ruchów ciężarówki, szczególnie w niebezpiecznych warunkach lub scenariuszach awarii, zapewniając bezpieczeństwo i wydajność.
Celem laboratorium jest rozszerzenie zastosowania technologii pojazdów autonomicznych poza transport pasażerski. Chcą wykorzystać ją w innych gałęziach przemysłu, takich jak rolnictwo, górnictwo i transport morski, zwiększając w ten sposób wydajność i zmniejszając przestoje operacyjne.
Poznaj WATonoTruck
Ciężarówka, która nie potrzebuje kierowcy – to WATonoTruck! Jest to autonomiczna ciężarówka z platformą z niezależnym napędem kół i układem kierowniczym. Jest zbudowana na platformie modułu narożnego (CM).
CM zostały opracowane z myślą o modułowej konstrukcji pojazdu i mogą być instalowane na dowolnym podwoziu w dowolnej konfiguracji.
Każdy CM funkcjonuje jako jednokółowy pojazd elektryczny wyposażony we własną jednostkę sterującą. Umożliwia niezależną pracę z układami napędowym, hamulcowym, kierowniczym i zawieszenia.
To sprawia, że ciężarówka jest super inteligentna i przystosowana do każdego zastosowania i terenu.
WATonoTruck zasilany przez Ellipse-D
Jako lider w dziedzinie precyzyjnych rozwiązań pozycjonowania i nawigacji, z dumą współpracujemy z Mechatronic Vehicle Systems Lab Uniwersytetu Waterloo.
Dostarczamy Ellipse-D, dwuantenowy RTK INS, zapewniający niezrównaną dokładność pozycji i heading.
Ten poziom precyzji jest kluczowy dla autonomicznej nawigacji, zapewniając bezpieczne i dokładne przemieszczanie się WATonoTruck, nawet w trudnych warunkach.

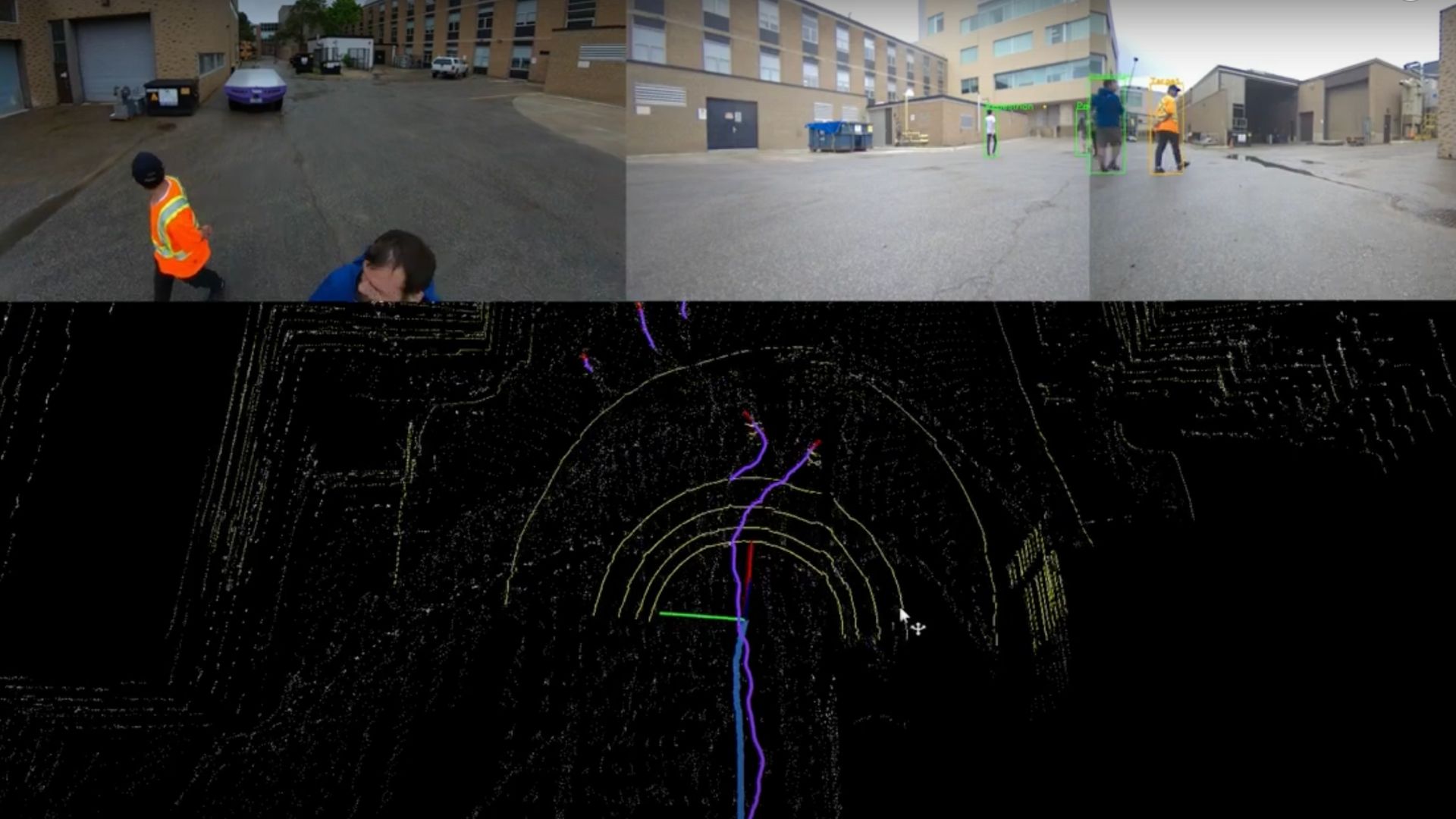
Ellipse-D (3. generacji), czujniki LiDAR oraz zaawansowane kamery – ten kompleksowy zestaw sensorów umożliwia mapowanie otoczenia w czasie rzeczywistym, wykrywanie przeszkód i planowanie ścieżki.
Dzięki naszemu sponsoringowi, rozwój WATonoTruck przez laboratorium zyskuje kluczowe wsparcie w zakresie wysokiej precyzji, zapewniając niezawodne dane dotyczące ruchu i nawigacji.
To wspólne przedsięwzięcie nie tylko przyczynia się do pomyślnego rozwoju WATonoTruck, ale także wspiera rozwój zastosowań pojazdów autonomicznych w różnych branżach, napędzając innowacje i bezpieczeństwo w transporcie i poza nim.

Ellipse-D
Ellipse-D to inercjalny system nawigacyjny integrujący podwójną antenę i dwuczęstotliwościowy RTK GNSS, który jest kompatybilny z naszym oprogramowaniem do post-processingu Qinertia.
Zaprojektowana z myślą o robotyce i zastosowaniach geodezyjnych, może łączyć dane z licznika impulsów (Pulse) lub CAN OBDII w celu zwiększenia dokładności nawigacji inercyjnej.

Zapytaj o wycenę Ellipse-D
Masz pytania?
Witamy w naszej sekcji FAQ! Znajdziesz tutaj odpowiedzi na najczęściej zadawane pytania dotyczące prezentowanych przez nas aplikacji. Jeśli nie znajdziesz tego, czego szukasz, skontaktuj się z nami bezpośrednio!
Jaka jest różnica między RTK a PPK?
Real-Time Kinematic (RTK) to technika pozycjonowania, w której poprawki GNSS są przesyłane niemal w czasie rzeczywistym, zazwyczaj przy użyciu strumienia poprawek w formacie RTCM. Mogą jednak wystąpić trudności w zapewnieniu poprawek GNSS, w szczególności ich kompletności, dostępności, zasięgu i kompatybilności.
Główną zaletą PPK nad RTK post processing jest możliwość optymalizacji czynności przetwarzania danych podczas post-processingu, w tym przetwarzania w przód i w tył, podczas gdy w przetwarzaniu w czasie rzeczywistym każda przerwa lub niezgodność w poprawkach i ich transmisji prowadzi do niższego poziomu dokładności pozycjonowania.
Pierwszą kluczową zaletą post-processingu GNSS (PPK) w porównaniu z czasem rzeczywistym (RTK) jest to, że system używany w terenie nie musi mieć łącza danych/radia do przekazywania poprawek RTCM pochodzących z CORS do systemu INS/GNSS.
Głównym ograniczeniem we wdrażaniu post-processingu jest wymóg działania aplikacji końcowej w danym środowisku. Z drugiej strony, jeśli Twoja aplikacja może wytrzymać dodatkowy czas przetwarzania potrzebny do wygenerowania zoptymalizowanej trajektorii, znacznie poprawi to jakość danych dla wszystkich Twoich produktów.
Co to jest Precise Point Positioning?
Precise Point Positioning (PPP) to technika nawigacji satelitarnej, która oferuje bardzo precyzyjne pozycjonowanie dzięki korygowaniu błędów sygnału satelitarnego. W przeciwieństwie do tradycyjnych metod GNSS, które często opierają się na naziemnych stacjach referencyjnych (jak w RTK), PPP wykorzystuje globalne dane satelitarne i zaawansowane algorytmy, aby zapewnić dokładne informacje o położeniu.
PPP działa w dowolnym miejscu na świecie bez potrzeby korzystania z lokalnych stacji referencyjnych. Dzięki temu nadaje się do zastosowań w odległych lub wymagających środowiskach, gdzie brakuje infrastruktury naziemnej. Wykorzystując precyzyjne dane dotyczące orbity i zegara satelity, wraz z poprawkami dotyczącymi wpływu atmosfery i odbioru wielodrożnego, PPP minimalizuje typowe błędy GNSS i może osiągnąć dokładność na poziomie centymetrów.
Podczas gdy PPP może być wykorzystywane do pozycjonowania po przetworzeniu, które polega na analizie zebranych danych po fakcie, może również dostarczać rozwiązania do pozycjonowania w czasie rzeczywistym. PPP w czasie rzeczywistym (RTPPP) jest coraz szerzej dostępne, umożliwiając użytkownikom otrzymywanie poprawek i określanie swojej pozycji w czasie rzeczywistym.
