
Stellar-40 land/air Sistema de navegação inercial de nível tático
Stellar Land/Air é um sistema de navegação inercial GNSS de nível tático, equipado com a pilha SAF2Nav para oferecer resiliência incomparável. Ele combina uma IMU de nível tático, um GNSS resistente a interferências e falsificações e algoritmos avançados de fusão de sensores em um invólucro robusto.
Combinando desempenho de ponta com flexibilidade industrial, Stellar Land/Air apresenta uma arquitetura exclusiva de mitigação de vibração de três camadas em um design otimizado para escalabilidade, atendendo às rigorosas exigências da produção em massa.
Com este lançamento, SBG Systems expande SBG Systems seu portfólio de soluções de navegação inercial sob medida para aplicações de missão crítica. Stellar é isento de ITAR.
Stellar-40 land/air
Nosso Stellar Land/Air é o primeiro de uma nova Stellar lançada para atender às crescentes exigências operacionais. Este INS de nível tático INS em dois objetivos principais: aumentar a resiliência em condições operacionais adversas e garantir a escalabilidade, sem comprometer o desempenho.
Para enfrentar os desafios decorrentes de altas vibrações, SBG Systems uma obra-prima da engenharia mecânica: um sistema exclusivo de proteção contra vibrações de três camadas. Foi realizada uma análise modal completa para garantir que o produto seja robusto e confiável, mantendo o design notavelmente simples.
Pronto para navegação por estimativa com o mecanismo SAF2Nav em seu núcleo, Stellar Land/Air integra-se perfeitamente à sua plataforma para oferecer navegação resiliente, mesmo nas condições mais adversas GNSS.
Explore todos os recursos!




Visão geral do Stellar Terra/Ar
Resistente. Preciso. Sem falhas.
Explore os principais recursos abaixo para saber mais sobre Stellar Land/Air.
Obra-prima da engenharia mecânica
A vibração é inimiga da precisão, e é por isso que nosso INS um sistema de mitigação de vibração de três níveis. Nosso projeto mecânico exclusivo isola os sensores por meio de três estágios distintos para garantir a máxima precisão. O primeiro estágio envolve amortecimento IMU, proporcionando amortecimento interno diretamente no nível do sensor. O segundo estágio utiliza um projeto de caixa otimizado, com um invólucro desenvolvido por meio de análise modal para eliminar a ressonância e reduzir as vibrações induzidas pelo próprio invólucro. Por fim, o terceiro estágio emprega isolamento externo por meio de amortecedores externos para separar mecanicamente a unidade da estrutura do veículo.
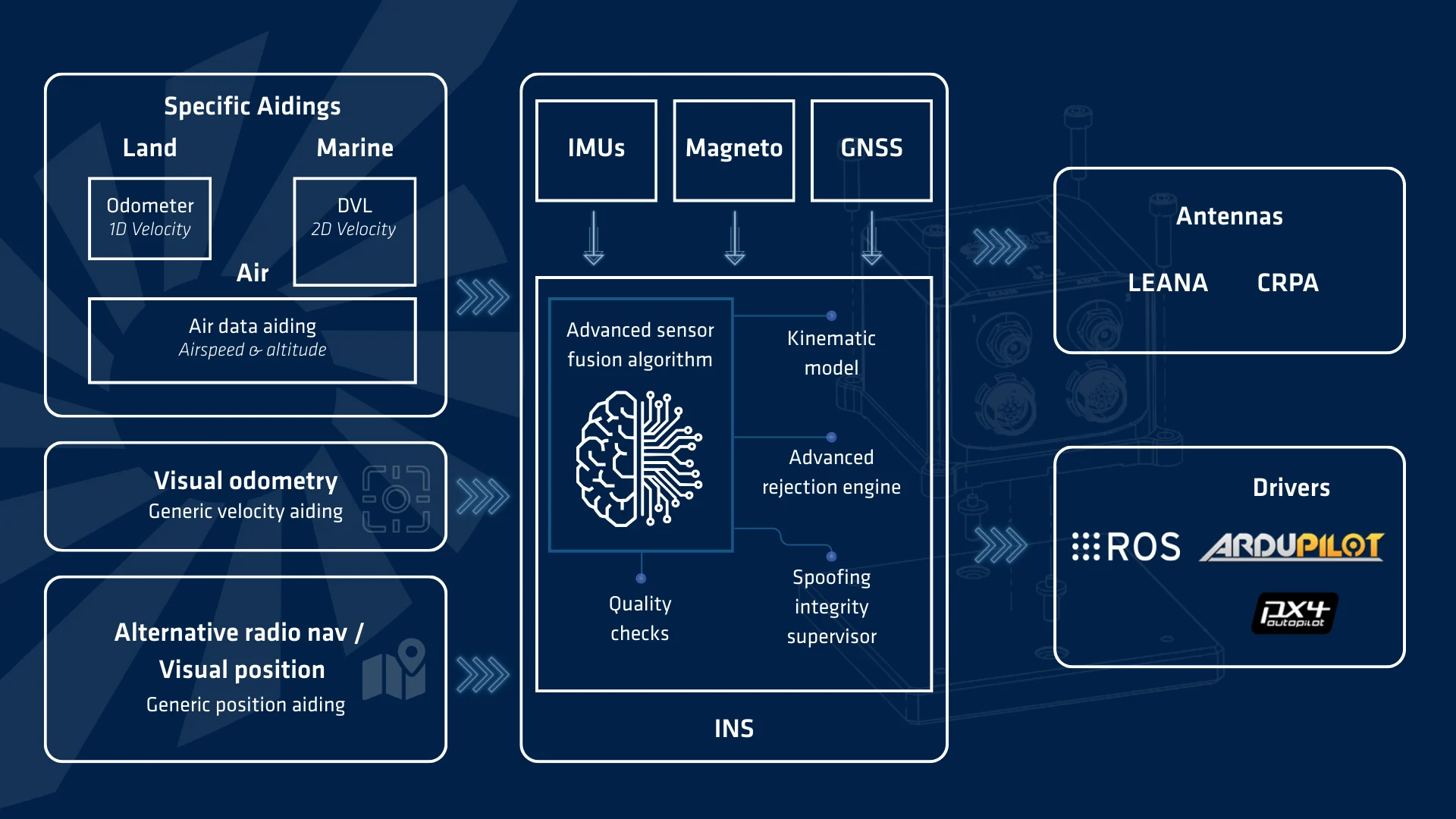
Pilha de navegação resiliente com SAF2Nav
GNSS não GNSS mais algo garantido. É por isso que nossa pilha SAF2Nav está no centro do nosso INS, garantindo precisão e segurança quando GNSS ou é atacado. Ela se baseia em três pilares principais. Primeiro, a fusão multissensor combina dados GNSS, IMU, aéreos, de radar e de visão em uma única solução de navegação coerente. Segundo, um novo supervisor de integridade contra spoofing monitora os sensores para detectar anomalias instantaneamente, reduzindo drasticamente o tempo crítico de alerta. Por fim, modelos cinemáticos adaptativos maximizam a precisão da navegação, permitindo que o algoritmo de fusão se adapte perfeitamente à dinâmica de movimento específica da sua plataforma.
Ferramenta integrada de monitoramento de vibrações
Monitorar vibrações para entender e mitigar ressonâncias estruturais raramente é simples e muitas vezes requer hardware externo dedicado. É por isso que integramos ferramentas de monitoramento abrangentes diretamente no INS Stellar-40. O sistema possui um acelerômetro dedicado de alta largura de banda operando até 16 kHz, combinado com recursos avançados de processamento onboard. Ele fornece visualização em tempo real de RMS, magnitude de pico e frequência de pico em quatro bandas de frequência distintas, permitindo aos usuários identificar exatamente onde ocorrem vibrações críticas. Além disso, esses dados valiosos são gravados e reutilizados de forma contínua para análises FFT aprofundadas subsequentes.

Compatibilidade com o ecossistema
Um sistema de navegação potente só é bom se tiver a capacidade de se integrar perfeitamente à sua arquitetura. É por isso que a compatibilidade com o ecossistema é um pilar fundamental do nosso INS, projetado para acelerar a implantação e eliminar os custos de integração. Primeiro, o sistema está totalmente equipado com drivers prontos para uso, oferecendo suporte nativo para plataformas autônomas padrão da indústria, incluindo ROS2, ArduPilot e PX4. Segundo, para garantir a máxima resiliência em ambientes contestados, ele oferece compatibilidade plug-and-play direta com antenas CRPA avançadas. Essa profunda interoperabilidade garante uma implantação sem esforço em todas as suas plataformas críticas.
Especificações
Desempenho de movimento e navegação
Até 0,3 % da distância percorrida ** Posição horizontal de ponto único
1.2 m Posição vertical de ponto único
1.2 m Posição horizontal RTK
0,01 m + 1 ppm Posição vertical RTK
0,01 m + 1 ppm Posição horizontal PPK
0,01 m + 1 ppm * Posição vertical PPK
0,01 m + 1 ppm * Roll/pitch de ponto único
0.03 ° Roll/pitch RTK
0.015 ° Roll/Pitch PPK
0,015 ° * Rumo de ponto único
0.08 ° Rumo RTK
0.05 ° Direção PPK
0,035 ° * Velocidade
0,05 m/s
Funcionalidades de navegação
Antena GNSS simples e dupla Sensores Aidings
Dados aéreos, DVL, odômetro, auxílio genérico à localização, auxílio genérico à velocidade Resiliência contra interferências e falsificação de identidade
Avançado Precisão da compensação vertical (heave) em tempo real
5 cm ou 5% de ondulação Período da onda de compensação vertical (heave) em tempo real
0 a 20 s Modo de compensação vertical (heave) em tempo real
Ajuste automático
Perfis de Movimento
Embarcações de superfície, veículos subaquáticos, levantamento marinho, marinho e marinho adverso Aéreo
Aviões, helicópteros, aeronaves, UAV Land
Carro, automotivo, trem/ferrovia, caminhão, veículos de duas rodas, máquinas pesadas, pedestre, mochila, off road
Desempenho do GNSS
Antena dupla, 789 canais GNSS
500 m/s e 80 km de altitude Banda de frequência
Multifrequência Recursos GNSS
SBAS, RTK, PPK, RAW Sinais de GPS
L1C/A, L1C, L2C, L2PY, L5 Sinais do Galileo
E1, E5a, E5b, E6BC Sinais Glonass
L1C/A, L2C/A, L2P, L3OC Sinais Beidou
B1I, B1C, B2a, B2I, B3I, B2b Outros sinais
NaviC L5, Banda L, QZSS GNSS tempo para a primeira correção
< 35 s Jamming & spoofing
Anti-interferência e anti-spoofing automáticos, OSNMA, rejeição automática avançada de múltiplos sensores
Especificações ambientais e faixa de operação
IP-65 Temperatura de operação
-40 °C a 71 °C Vibrações
3 g RMS – 20 Hz a 2 kHz Choques
500 g para 0,3 ms MTBF (calculado)
246 000 horas Compatível com
MIL-STD 461G | MIL-STD 1275E | MIL-STD 810H
Interfaces
GNSS, RTCM, NTRIP, dados de voo, odômetro, velocidade e posição genéricas Protocolos de saída
NMEA, ASCII, sbgECom (binário), REST API Protocolos de entrada
NMEA, ASCII, sbgECom (binário), REST API Datalogger
8 GB ou 48 h @ 200 Hz Taxa de saída
200 Hz (IMU, INS) Portas seriais
4x E/S serial até 921.600 bps CAN
1x barramento CAN 2.0 A/B, até 1 Mbps Sync OUT
2x Saída de sincronização (1x RS232 + 1x níveis TTL) Sync IN
4 entradas de sincronização (níveis RS232) Ethernet
1x Ethernet Full duplex (10/100 base T) PTP/NTP, NTRIP, interface Web, FTP Conectores
2x Micro 15 (E/S) 2x conectores SMA (antenas)
Especificações mecânicas e elétricas
9 a 36 VCC Consumo de energia
< 3 W without antennas Peso (g)
< 320 g Dimensões (CxLxA)
81 mm x 130 mm x 40 mm
Especificações de tempo
< 200 ns Precisão PTP
< 1 µs Precisão do PPS
< 1 µs (jitter < 1 µs) Desvio na navegação estimada
1 ppm

Aplicações
Stellar Land/Air é o nosso sistema de navegação inercial MEMS de última geração, projetado para ampliar os limites de desempenho em operações submarinas, marítimas, terrestres e aéreas. O nosso Stellar Land/Air oferece novos modos de alinhamento, novas estratégias de auxílio e novas aplicações, proporcionando o máximo em precisão e robustez de navegação para seus projetos.
Obtenha precisão de navegação ideal e capacidade de navegação por estimativa em uma ampla gama de aplicações.
Ficha técnica Stellar Terra/Ar
Receba todos os recursos e especificações do produto diretamente na sua caixa de entrada!
Compare Stellar Terra/Ar com outros produtos
Avance e compare nossa linha de sensores inerciais mais avançada para navegação, movimento e detecção de elevação. As especificações completas podem ser encontradas no Manual de Hardware disponível mediante solicitação.

Stellar-40 land/air |
||||
|---|---|---|---|---|
| Posição horizontal de ponto único | Posição horizontal de ponto único 1,2 m | Posição horizontal de ponto único 1,2 m | Posição horizontal de ponto único 1,0 m | Posição horizontal de ponto único 1,2 m |
| Resiliência contra falsificação e interferência | Resiliência contra falsificação e interferência Todas as constelações, banda completa, monitoramento avançado e mitigação | Resiliência contra falsificação e interferência Todas as constelações, banda dupla, monitoramento e mitigação | Resiliência contra falsificação e interferência Todas as constelações, banda tripla, monitoramento avançado e mitigação | Resiliência contra falsificação e interferência Todas as constelações, banda dupla, monitoramento e mitigação |
| Resiliência às vibrações | Resiliência às vibrações Nível triplo | Resiliência às vibrações Um nível | Resiliência às vibrações Um nível | Resiliência às vibrações Um nível |
| Datalogger | Datalogger 8 GB ou 48 h @ 200 Hz | Datalogger 8 GB ou 48 h @ 200 Hz | Datalogger 8 GB ou 48 h @ 200 Hz | Datalogger – |
| Ethernet | Ethernet Full duplex (10/100 base-T), clock mestre PTP, NTP, interface web, FTP, REST API | Ethernet Full duplex (10/100 base-T), clock mestre PTP, NTP, interface web, FTP, REST API | Ethernet Full duplex (10/100 base-T), clock mestre PTP, NTP, interface web, FTP, REST API | Ethernet – |
| Peso (g) | Peso (g) 250 g | Peso (g) 165 g | Weight (g) < 900 g | Peso (g) 65 g |
| Dimensões (CxLxA) | Dimensões (CxLxA) 81 x 130 x 40 mm | Dimensões (CxLxA) 42 x 57 x 60 mm | Dimensões (CxLxA) 130 x 100 x 75 mm | Dimensões (CxLxA) 46 x 45 x 32 mm |



Compatibilidade
Uma seleção compatível de antenas anti-interferência e anti-spoofing
Selecionamos uma gama ideal de antenas anti-interferência e anti-spoofing, totalmente testadas e validadas quanto à compatibilidade. Esta gama inclui tecnologias comprovadas, como CRPA (Controlled Reception Pattern Antenna) e LEANA (Low-Elevation Anti-Jam Navigation Antenna).
Explore as nossas soluções recomendadas!







Documentação e recursos
Stellar Land/Air inclui uma documentação online completa, concebida para apoiar os usuários em todas as etapas.
Desde guias de instalação até configuração avançada e solução de problemas, nossos manuais claros e detalhados garantem uma integração e operação tranquilas.
Nossos estudos de caso
Explore casos de uso reais que demonstram como nossas soluções aumentam o desempenho, reduzem o tempo de inatividade e melhoram a eficiência operacional. Saiba como nossos sensores avançados e interfaces intuitivas fornecem a precisão e o controle necessários para você se destacar em suas aplicações.






Produtos e acessórios adicionais
Descubra como nossas soluções podem transformar suas operações, explorando nossa gama diversificada de aplicações. Com nossos sensores e software de Movimento e Navegação, você obtém acesso a tecnologias de ponta que impulsionam o sucesso e a inovação em seu campo.
Junte-se a nós para desbloquear o potencial das soluções de navegação inercial e posicionamento em vários setores.
Qinertia GNSS-INS

Cabos

Antenas GNSS
Processo de produção
Descubra a precisão e a expertise por trás de cada produto da SBG Systems, como uma IMU, AHRS ou INS. O vídeo a seguir oferece uma visão interna de como projetamos, fabricamos e testamos meticulosamente nossos sistemas de navegação inercial de alto desempenho. Da engenharia avançada ao rigoroso controle de qualidade, nosso processo de produção garante que cada produto atenda aos mais altos padrões de confiabilidade e precisão.
Assista agora para saber mais!

Solicite uma cotação
Eles falam sobre nós
Apresentamos as experiências e depoimentos de profissionais do setor e clientes que utilizaram nossos produtos em seus projetos.
Suas opiniões refletem a qualidade e o desempenho que definem nosso INS, enfatizando seu papel como uma solução confiável na área.
Descubra como nossa tecnologia inovadora transformou suas operações, aumentou a produtividade e proporcionou resultados confiáveis em várias aplicações.
Seção de FAQ
Bem-vindo à nossa seção de FAQ, onde abordamos as suas perguntas mais urgentes sobre a nossa tecnologia de ponta e suas aplicações. Aqui, você encontrará respostas abrangentes sobre os recursos do produto, processos de instalação, dicas de solução de problemas e práticas recomendadas para maximizar sua experiência com o nosso INS compacto. Seja você um novo usuário em busca de orientação ou um profissional experiente em busca de insights avançados, nossas FAQs são projetadas para fornecer as informações de que você precisa.
Encontre suas respostas aqui!
O que é navegação por estimativa?
A navegação por estimativa é um método de navegação sem GNSS , que se baseia na inércia e em outros dados de sensores para manter o rastreamento contínuo. Normalmente, quando GNSS perdido, um sistema perde completamente a sua posição. Com a navegação por estimativa, o sistema calcula uma posição contínua que irá desviar-se lentamente ao longo do tempo. A taxa deste desvio depende da qualidade da IMU interna IMU da disponibilidade de sensores auxiliares externos.
Quais formatos são compatíveis com recursos externos (por exemplo, dados aéreos, visão)?
O Stellar-40 utiliza nosso protocolo proprietário sbgECom, que emprega frames de mensagem claramente definidos. Usando essas mensagens predefinidas, o sistema pode ingerir de forma contínua dados de airdata, velocidades do corpo e dados de posição absoluta de qualquer sensor externo capaz de fornecer essas informações.
Existe um campo específico para inserir manualmente a estimativa do vento?
Não, pois não é necessário. O algoritmo avançado de fusão de sensores do Stellar-40 calcula e estima automaticamente as condições do vento em tempo real, eliminando a necessidade de inseri-las manualmente.
Quais opções de auxílio externo estão disponíveis para aplicações terrestres?
Para plataformas terrestres, o Stellar-40 suporta uma variedade de entradas de auxílio para melhorar a precisão da navegação, especialmente em ambientes com negação de GNSS. Isso inclui odômetros de hardware (odometria de roda), auxílios de velocidade de sensores externos (como LiDAR ou sensores ópticos) e auxílios de posição absoluta.
Como escolho entre as versões amortecida e não amortecida do Stellar-40?
A escolha certa depende do seu ambiente operacional. Recomendamos fortemente a versão amortecida para plataformas expostas a ambientes adversos e com vibrações, como drones de ataque profundo ou veículos terrestres não tripulados (UGVs). Se você não tiver certeza de qual versão é mais adequada para sua aplicação, nossa equipe de suporte está pronta para ajudá-lo a fazer a escolha certa.
O que é guerra eletrônica?
O que é guerra eletrônica?
Guerra eletrônica (EW) é o uso do espectro eletromagnético—ondas de rádio, sinais de radar, infravermelho, etc.—para detectar, perturbar, enganar ou negar os sistemas de um inimigo, enquanto protege os seus próprios.
Os três pilares principais da Guerra Eletrônica
1. Ataque Eletrônico (EA)
Este é o lado ofensivo—interferindo ativamente nos sistemas inimigos.
- Jamming: Bloquear comunicações ou radar (por exemplo, impedindo que drones recebam comandos)
- Spoofing: Envio de sinais falsos (por exemplo, posições GPS falsas)
- Energia direcionada: Uso de energia eletromagnética para danificar ou desabilitar eletrônicos
Objetivo: confundir, cegar ou desabilitar o oponente.
2. Proteção Eletrônica (EP)
Este é o lado defensivo—garantindo que seus próprios sistemas continuem funcionando sob ataque.
- Técnicas anti-jamming (como rádios com salto de frequência)
- Criptografia de sinal
- Blindagem e filtragem contra interferência
Objetivo: manter suas comunicações, navegação e sensores confiáveis.
3. Suporte Eletrônico (ES)
Trata-se de escutar e compreender o ambiente eletromagnético.
- Detecção de sinais (localizar radares ou rádios inimigos)
- Interceptação (captura de comunicações)
- Análise (identificação de ameaças e locais)
Objetivo: coletar inteligência e consciência situacional.
Exemplo prático simples
Imagine um drone em uma zona de combate:
- ES detecta um radar inimigo rastreando-o
- EA interfere naquele radar ou falsifica sua posição
- EP garante que o GNSS e as comunicações do drone ainda funcionem apesar da interferência
Sistemas modernos—drones, mísseis, aeronaves, navios—dependem fortemente de eletrônicos e sinais. EW permite que as forças:
- Operem em ambientes com negação de GNSS
- Reduzam a dependência de combate físico direto
- Obtenham uma vantagem decisiva sem disparar um tiro
