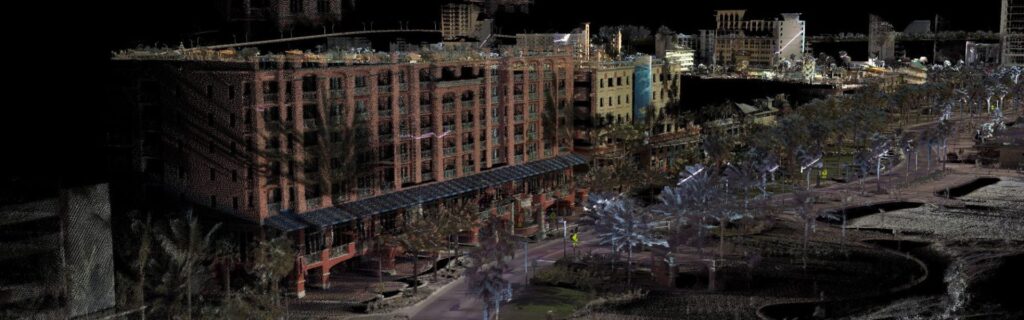
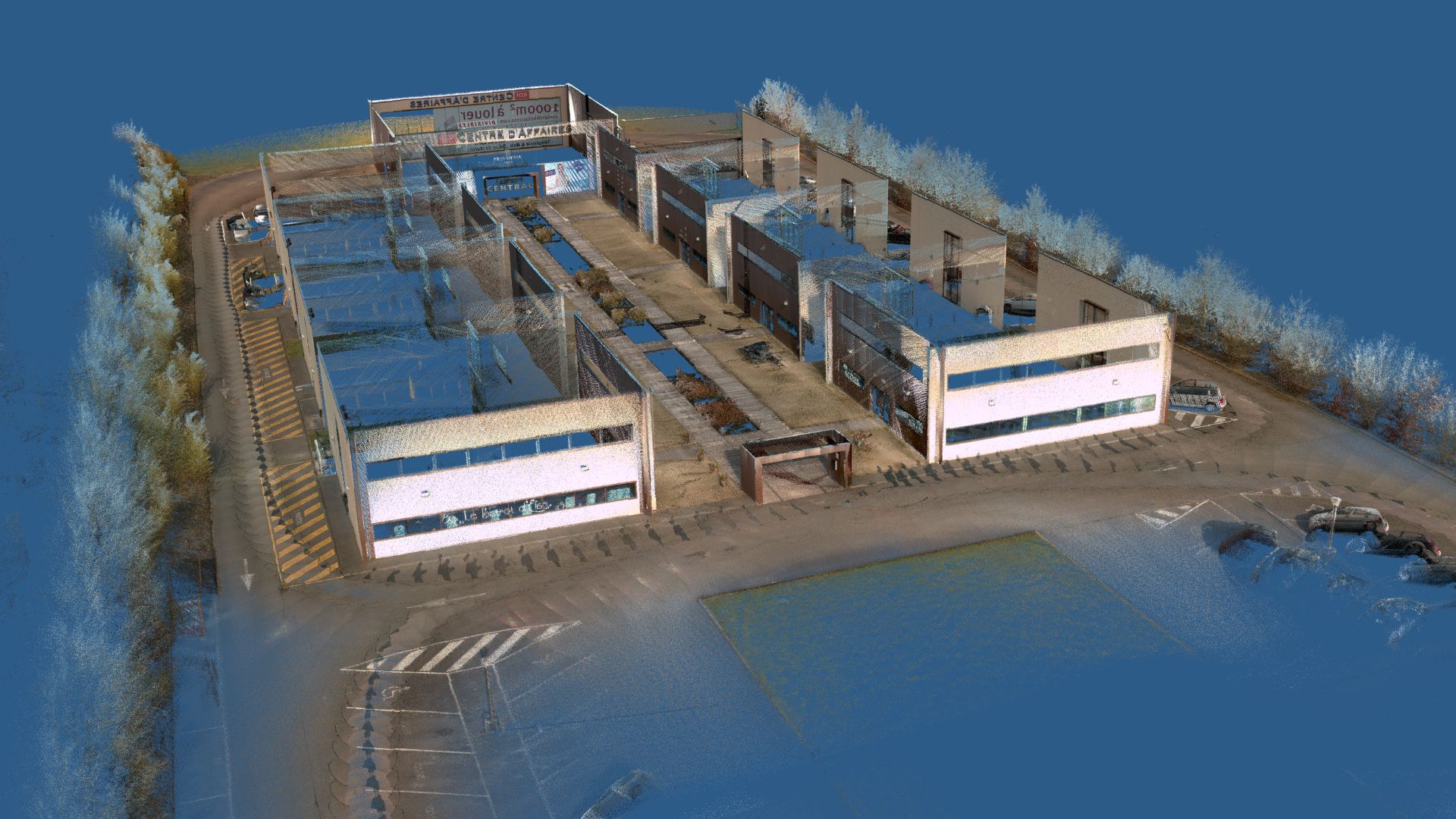
SLAMベースのモバイルマッピング
vMS3Dは、慣性、GNSS、およびSLAM技術の最高のものを組み合わせたモバイルマッピングシステムです。
“Ellipse INSは、非常に高精度な速度データを提供します。” | VIAMETRIS創設者、Ninot氏

VIAMETRISは、SLAMベースのソリューションの開発における先駆者です。2年前、同社はSLAM技術に基づく屋内マッピングシステムであるiMS3Dをリリースしました。
この経験を生かして、同社は新しいソリューションであるvMS3Dを発売しました。これは、慣性、GNSS、SLAM技術を組み合わせたモバイルマッピングシステムであり、魅力的な性能/価格比を備えた革新的なソリューションを提供します。
最もスマートなモバイルマッピングシステム
vMS3Dは、従来のモバイルマッピングシステム(MMS)のように見えます。360°カメラ、回転式LiDAR、GNSS受信機を備えた内部ナビゲーションシステムを統合しています。
簡単な自動ワークフローは、それをユニークにする微妙かつ洗練された内部計算を示していません。実際、vMS3Dには、SLAM計算に使用される追加のLiDARが装備されています。
取得後、ポストプロセッシングソフトウェア(PPiMMSという名前)は、GNSSが十分な状況、慣性が優先される状況、またはSLAMが必要な状況を自動的に分析します。
GNSS、慣性、SLAMの最高の組み合わせ
vMS3Dソリューションは、各技術の使用条件に応じて、それぞれの長所と短所を考慮しています。
- GNSS:GNSS受信機が信頼性の高いデータを提供する場合(たとえば、開けた空の環境など)、ソリューションはその位置に依存します。GNSSの停止または妨害が発生した場合、システムは慣性ベースのデータまたはSLAMベースのデータを選択します
- SLAM:都市部の峡谷や森林など、周囲の物体が非常に多様で近い密集した環境では、SLAMから計算された位置が推奨されます。 SLAM機能は、物体が遠すぎるか、区別できない環境では制限されます。
- 慣性:慣性航法システム(INS)によって提供される速度と姿勢の情報は、GNSSおよびSLAMが制限されているすべての場合においてナビゲーションを支援することができます。慣性航法システムは、すべてのLiDARデータを拘束するためにロールとピッチを提供するため、点群は地上レベルで参照されます。特に急な方向転換が発生した場合、旋回速度も非常に役立ちます。実際、LiDARが動作している場合、2つのスキャン間で姿勢補正が必要です。
Ellipse-D、VIAMETRISの賢明な選択
すでに非常に満足しています Ellipse の性能に既に非常に満足していたため、VIAMETRISの創設者であるジェローム・ニノ氏は、新たな革新的INS 選定INS 、遠くまで探す必要はありませんでした。
「Ellipse INS 、非常に精密な速度INS 」とニノ氏は述べる。
革新的なSLAM計算により、VIAMETRISは小型でコスト効率の高い慣性センサーに依存できる一方、市場にある他のシステムはより高精度な慣性システムを必要とする。Ellipse 0.1°の姿勢精度を実現する。
Ninot氏はまた、オールインワンで小型なフォームファクタと、組み込みのRTK GNSS受信機を搭載した Ellipse-D モデルを選択しました。
「Ellipse-Dのような統合されたINSを使用することで、単一の通信インターフェースとGNSSおよびLiDARへの組み込みの同期機能が提供され、当社のSLAMの専門知識に集中することができました」とCEOは付け加え、ケーブルが少ないことは常に良い選択であると述べています。
Ellipse-D、多くのタスクのパートナー
この革新的なソリューションに統合されたEllipse-Dは、いくつかのタスクを実行します。まず、すべてのLiDARデータを拘束するためにロールとピッチを提供し、点群が地上レベルで参照されます。
次に、Ellipse-Dの旋回率は、特に急な方向転換が発生した場合に非常に役立ちます。実際、LiDARが動作している場合、2つのスキャン間で方位補正が必要です。
最後に、Ellipse-Dは慣性とGNSSの情報をリアルタイムで融合し、優れた速度測定を提供します。これは、vMS3Dの内部アルゴリズムを継続的に支援するためにも非常に重要です。

Ellipse-D
Ellipse、デュアルアンテナおよびデュアル周波数RTKGNSS 統合した慣性航法システムGNSS 当社の後処理ソフトウェア「Qinertia」に対応しています。
ロボット工学および地理空間アプリケーション向けに設計されており、オドメーター Pulse OBDIIを融合させるGNSS 、推測航法の精度を向上させることができます。

Ellipse-D の見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も一般的な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
ドローンマッピングのために、慣性システムとLIDARを組み合わせるにはどうすればよいですか?
SBG Systemsの慣性システムとドローンマッピング用のLiDARを組み合わせることで、正確な地理空間データの取得における精度と信頼性が向上します。
この統合がどのように機能し、ドローンベースのマッピングにどのように役立つかを以下に示します。
- 地球の表面までの距離をレーザーパルスで測定し、地形や構造物の詳細な3Dマップを作成するリモートセンシング手法。
- SBG Systems INSは、慣性計測ユニット(IMU)とGNSSデータを組み合わせることで、GNSSが利用できない環境でも、正確な位置、姿勢(ピッチ、ロール、ヨー)、速度を提供します。
SBGの慣性システムは、LiDARデータと同期されています。INSは、ドローンの位置と姿勢を正確に追跡し、LiDARは下の地形またはオブジェクトの詳細をキャプチャします。
ドローンの正確な姿勢を知ることにより、LiDARデータを3D空間に正確に配置できます。
GNSSコンポーネントはグローバルな位置情報を提供し、IMUはリアルタイムの姿勢と移動データを提供します。この組み合わせにより、GNSS信号が弱い、または利用できない場合(例:高層ビルの近くや密集した森林)、INSはドローンの経路と位置を追跡し続けることができ、一貫したLiDARマッピングが可能になります。
マルチビーム音響測深とは?
マルチビーム音響測深(MBES)は、海底や水中の地形を高精度でマッピングするために使用される高度な水路測量技術です。
従来のシングルビーム音響測深機は、船の真下の一点で水深を測定するのに対し、MBESは複数のソナービームを使用し、海底の広い範囲で同時に水深を測定します。これにより、地形、地質学的特徴、潜在的な危険箇所など、水中の地形を詳細かつ高解像度でマッピングできます。
MBESシステムは、水中を伝播する音波を発信し、海底で反射して船体に戻る音波を利用します。エコーが戻るまでの時間を分析することで、システムは複数のポイントで水深を計算し、水中の地形を詳細な地図として作成します。
この技術は、航行、海洋建設、環境モニタリング、資源探査など、さまざまなアプリケーションに不可欠であり、安全な海上運用と海洋資源の持続可能な管理のための重要なデータを提供します。
RTKとPPKの違いは何ですか?
リアルタイムキネマティック(RTK)は、GNSS補正がほぼリアルタイムで送信される測位技術であり、通常はRTCM形式の補正ストリームを使用します。ただし、GNSS補正、特にその完全性、可用性、カバレッジ、および互換性を確保する上で課題が生じる可能性があります。
RTKポスト処理に対するPPKの主な利点は、データ処理アクティビティをポスト処理中に最適化できることです。これには、順方向および逆方向処理が含まれます。一方、リアルタイム処理では、修正とその伝送における中断または非互換性により、位置決めの精度が低下します。
GNSSポスト処理(PPK)対リアルタイム(RTK)の最初の重要な利点は、フィールドで使用されるシステムが、CORSから送信されるRTCM補正をINS/GNSSシステムに供給するためのデータリンク/無線を必要としないことです。
ポスト処理の導入における主な制約は、最終的なアプリケーションが環境に対応する必要があることです。一方、最適化された軌道を作成するために必要な追加の処理時間に耐えられるアプリケーションであれば、すべての成果物のデータ品質が大幅に向上します。
