低ダイナミクス下での高いパフォーマンス
これらのシステムは、自律走行車用の高精細地図(HDマップ)の作成を可能にし、精度を高め、データギャップのリスクを低減するため、インフラマッピング、道路調査、環境分析などの用途に不可欠です。
高度なGNSSと慣性統合により、モバイルマッピングシステムは迅速なセットアップと迅速な初期化を実現し、ダウンタイムを最小限に抑え、迅速なデータ収集を可能にします。これは、インフラ移動調査や緊急対応マッピングなど、迅速な展開が重要な、時間的制約のあるシナリオにおいて特に価値があります。
都市部や屋内をゆっくりと移動する車両など、動きの少ない環境では、高性能な慣性システムが正確な測位と方位データを維持します。このような環境では、従来のGPSシステムは苦戦を強いられるかもしれませんが、GNSSと統合されたINS 、GNSSが利用できない環境であっても、継続的で信頼性の高いデータを保証します。
一貫した性能を確保することで、これらのシステムは、移動速度や環境の複雑さに関係なく、正確な3Dモデル、地形図、地理空間製品を作成します。

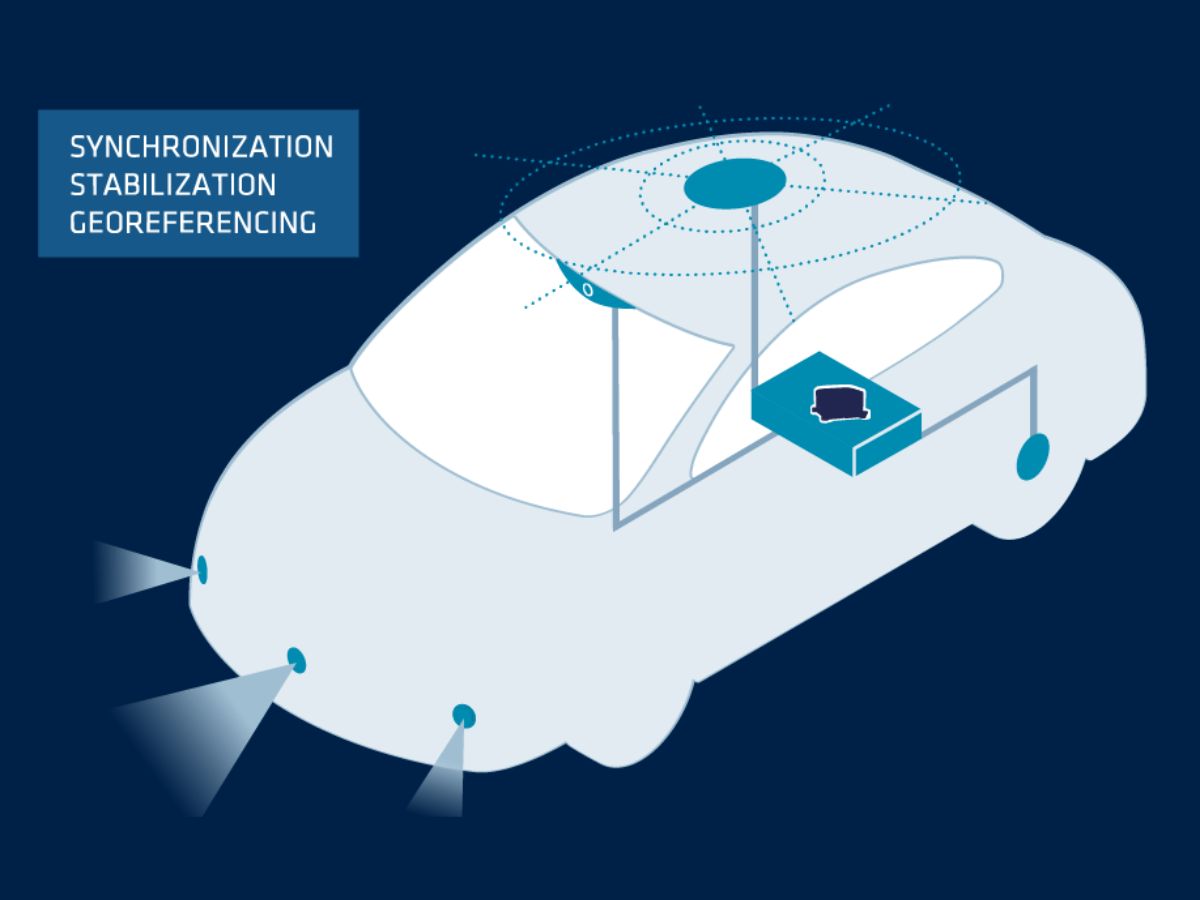
同期機能内蔵の単一通信インターフェース
当社の慣性システムは、単一の通信インターフェースで合理化された統合プロセスをサポートします。INS 、GNSSセンサーとLiDARセンサーの両方からのデータの中央ハブとして機能します。業界標準の通信プロトコル、イーサネット、またはCANバスを使用することで、INS GNSSレシーバーおよびモバイルLiDARシステムとインターフェースすることができ、ハードウェアの複雑さを最小限に抑え、複数の通信リンクの必要性を回避します。
当社のINS ソリューションには、GNSS、LiDAR、および慣性データ間のシームレスなデータフュージョンを保証する同期機能が組み込まれています。
INS PTPマスタークロックとして機能し、SLAM操作に不可欠なすべてのセンサーからのタイムスタンプを同期します。リアルタイムクロック(RTC)機能とGNSSタイミングおよび外部トリガー信号を処理する機能により、INS 正確なSLAM処理のためにGNSSデータとLiDARデータが適切にアライメントされることを保証します。
リアルタイムおよびポスト処理機能
モバイル・マッピング・システム(MMS)は、リアルタイムと後処理の両方の機能を備えており、ユーザーは即座にデータにアクセスすることができる一方、後で結果を改良して精度を高めることができる。
リアルタイムのデータ取得により、エンジニアや測量士はその場で評価を行うことができる一方、後処理ソフトウェアは最終的な出力が可能な限り正確であることを保証する。慣性システムは、衛星信号が利用できない場合や劣化している場合でも、一貫した信頼性の高い位置データを維持することで、このプロセスに大きく貢献します。
慣性システムを搭載したモバイルマッピングプラットフォームは、データ収集と分析に柔軟性を提供します。オペレーターはパラメータをその場で調整することができ、マッピングプロジェクトが精度と精度に関する要求基準を満たすことを保証します。
さらなる改良のために、GNSSとINS データを後から改良することで軌道精度を高める強力な後処理ソフトウェアであるQinertiaを提供しており、SLAMベースのマッピングワークフローを補完することができます。

モバイルマッピングのソリューション
当社の慣性航法システムINS)は、サーベイ 市場向けに特別に設計されており、高性能で使いやすいシステムです。高度な慣性センサーをベースに、最先端のアルゴリズムとGNSS技術を統合し、高精度なナビゲーションと測位データを提供します。当社のシステムは適応性が高く、特定のアプリケーションのニーズを満たすために構成可能なコンポーネントを備えています。

Ekinox-D

Apogee-D

Navsight Land-Air
地図アプリケーションのパンフレット
パンフレットを受信箱に直接お届けします!
ケーススタディ
SBG Systems 、さまざまな業界の大手企業と提携し、モバイルマッピング用の高性能慣性ソリューションを提供しています。当社のケーススタディでは、データ取得と解析において当社の技術が極めて重要な役割を果たしたプロジェクトのサクセスストーリーを紹介しています。



私たちのことを話す
当社のテクノロジーを採用したイノベーターやクライアントから直接話を聞くことができます。
彼らの証言とサクセスストーリーは、当社のセンサーが実用的な自律走行車アプリケーションに大きな影響を与えていることを示している。
その他のマッピング 見る
SBG Systems 、陸上、海上、航空マッピング重要な役割を果たす高性能な慣性ナビゲーションシステムとモーションセンサーを提供しています。浚渫、港湾マッピング、屋内マッピングからUAV写真測量まで、SBGの慣性ソリューションは、地理空間専門家があらゆる環境で正確な位置、姿勢、モーションデータを収集するのに役立ちます。
マッピング アプリケーションをご覧ください。
ご質問はありますか?
よくある質問」では、モバイルマッピングシステムに関する最も一般的な質問を取り上げており、関連する技術、ベストプラクティス、弊社製品をお客様のソリューションに統合する方法などの情報を提供しています。
SLAMとは?
SLAMとは、Simultaneous Localization and Mappingの略で、ロボット工学やコンピュータビジョンで使用される計算技術であり、未知の環境の地図を作成すると同時に、その環境内のエージェントの位置を追跡する。これは、屋内や密集した都市部など、GNSSが利用できないシナリオで特に有用である。
SLAMシステムは、エージェントの位置と向きをリアルタイムで決定する。これには、ロボットやデバイスが環境内を移動する際の動きを追跡することが含まれる。エージェントが移動する間、SLAMシステムは環境のマップを作成する。これは2Dまたは3Dの表現で、レイアウト、障害物、周囲の特徴を捉えます。
これらのシステムは多くの場合、カメラ、LiDAR、慣性計測ユニット(IMU)などの複数のセンサーを利用して、環境に関するデータを収集する。このデータを組み合わせることで、ローカライゼーションとマッピングの精度が向上する。
SLAMアルゴリズムは、入力されたデータを処理し、マップとエージェントの位置を連続的に更新する。これには、フィルタリングや最適化技術を含む複雑な数学的計算が含まれる。
リアルタイム・キネマティックとは?
リアルタイム・キネマティック(RTK)は、全地球航法衛星システム(GNSS)測定から得られる位置データの精度を高めるために使用される精密な衛星ナビゲーション技術です。マッピング、農業、自律走行ナビゲーションなどのアプリケーションで広く採用されています。
GNSS信号を受信し、高精度で位置を計算する基地局を使用する。その後、補正データを1台以上のロービング・レシーバー(ローバー)にリアルタイムで送信する。ローバーはこのデータを使ってGNSSの測定値を調整し、位置精度を高める。
RTKは、GNSS信号をリアルタイムで補正することにより、センチメートルレベルの精度を提供します。これは、通常数メートル以内の精度を提供する標準的なGNSS測位よりもはるかに正確です。
基地局からの補正データは、無線、携帯電話ネットワーク、インターネットなど、さまざまな通信手段を介してローバーに送信される。このリアルタイム通信は、ダイナミックオペレーション中の精度維持に欠かせない。
精密ポイントポジショニングとは?
プリサイス・ポイント・ポジショニング(PPP)は、衛星信号の誤差を補正することで高精度の測位を提供する衛星ナビゲーション技術です。RTKのように地上の基準局に依存することが多い従来のGNSS手法とは異なり、PPPはグローバルな衛星データと高度なアルゴリズムを利用して正確な位置情報を提供します。
PPPは、ローカル基準局を必要とせず、世界中どこでも動作します。このため、地上インフラが不足している遠隔地や厳しい環境でのアプリケーションに適しています。正確な衛星軌道とクロックデータを大気やマルチパスの影響に対する補正とともに使用することで、PPPは一般的なGNSS誤差を最小限に抑え、センチメートルレベルの精度を達成することができます。
PPPは、収集したデータを事後的に分析するポストプロセス測位に使用することができますが、リアルタイム測位ソリューションを提供することもできます。リアルタイムPPP(RTPPP)はますます利用可能になってきており、ユーザーはリアルタイムで補正を受け、位置を決定することができる。
リアルタイムクロックとは何か?
リアルタイムクロック(RTC)は、電源がオフの状態でも現在の時刻と日付を記録するように設計された電子機器です。正確な計時を必要とするアプリケーションで広く利用されているRTCは、いくつかの重要な機能を果たします。
まず、秒、分、時、日、月、年の正確なカウントを維持し、多くの場合、長期的な精度のためにうるう年と曜日計算を組み込んでいます。RTCは低電力で動作し、バッテリバックアップで動作させることができるため、停電時にも時間を維持し続けることができます。また、データ入力やログにタイムスタンプを提供し、正確な文書化を保証します。
さらに、RTCはスケジュールされた動作をトリガーすることができ、システムが低電力状態からウェイクアップしたり、指定された時間にタスクを実行したりすることを可能にします。RTCは、複数のデバイス(GNSSINSINSなど)を同期させ、それらが統合的に動作することを保証する上で重要な役割を果たします。
RTCは、コンピュータや産業機器からIoT機器に至るまで、さまざまな機器に不可欠なもので、機能を強化し、複数のアプリケーションにわたって信頼性の高い時間管理を保証します。