Cartografía de interiores con mochila
El Ellipse-D RTK INS ayuda a la computación SLAM, sincroniza LiDAR y la cámara.
“Hace años que trabajamos con SBG Systems y la gama Ellipse en particular. Siempre hemos confiado en estos robustos sensores inerciales.” | Jérôme N., Fundador de VIAMETRIS
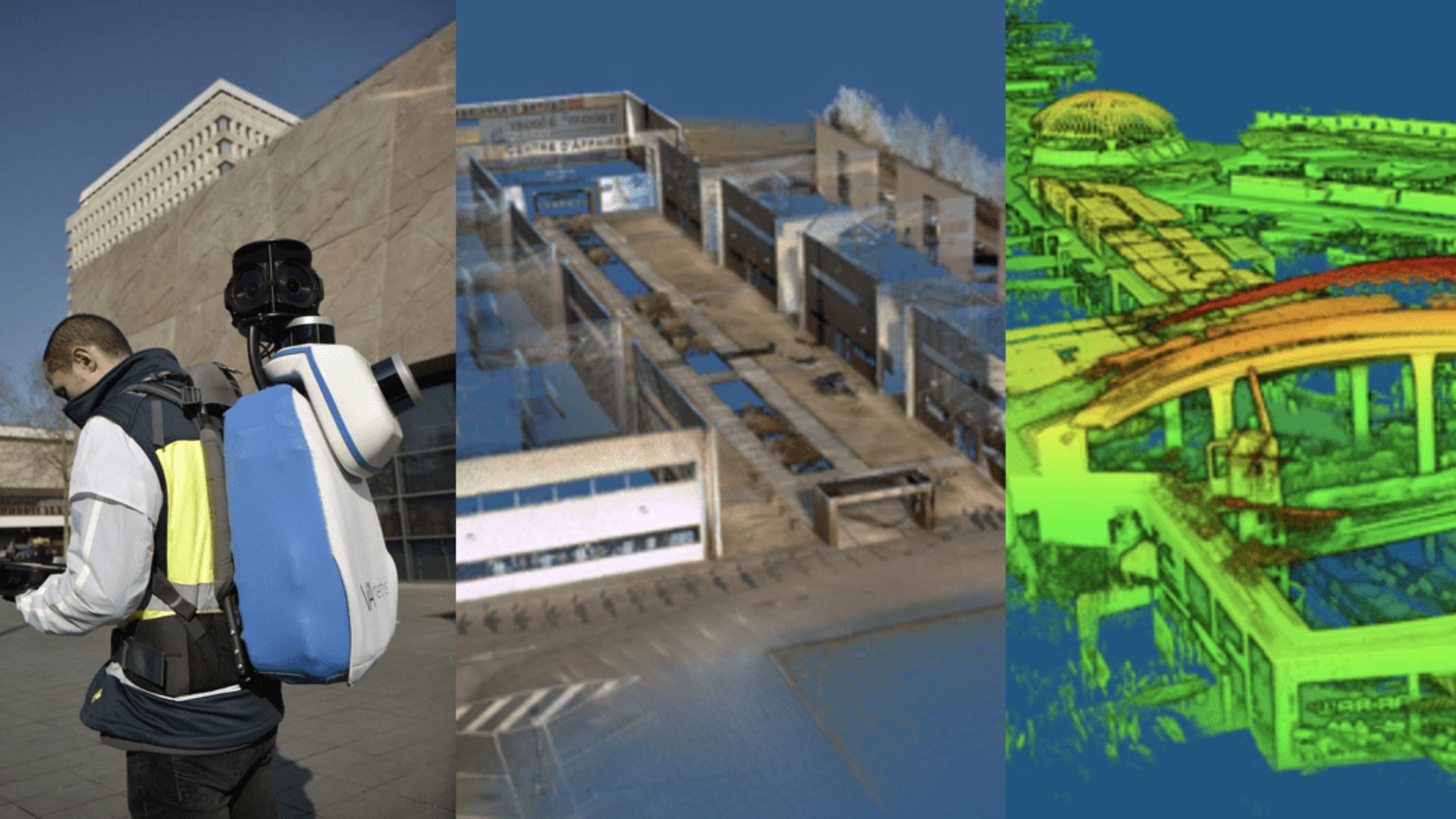
Sistema móvil de escaneo basado en mochila
El bMS3D-360 ha sido diseñado para los entornos más exigentes. Incorpora dos sensores Velodyne LiDAR, una cámara 360 Lady-bug, el Ellipse-D, el sistema de navegación inercial SBG con receptor GNSS L1/L2 interno y un ordenador.
Un flujo de trabajo acelerado 7 veces
El flujo de trabajo es sencillo. El topógrafo inicia el sistema, comprueba en una tableta que se calculan la información GNSS e inercial e inicia el levantamiento.
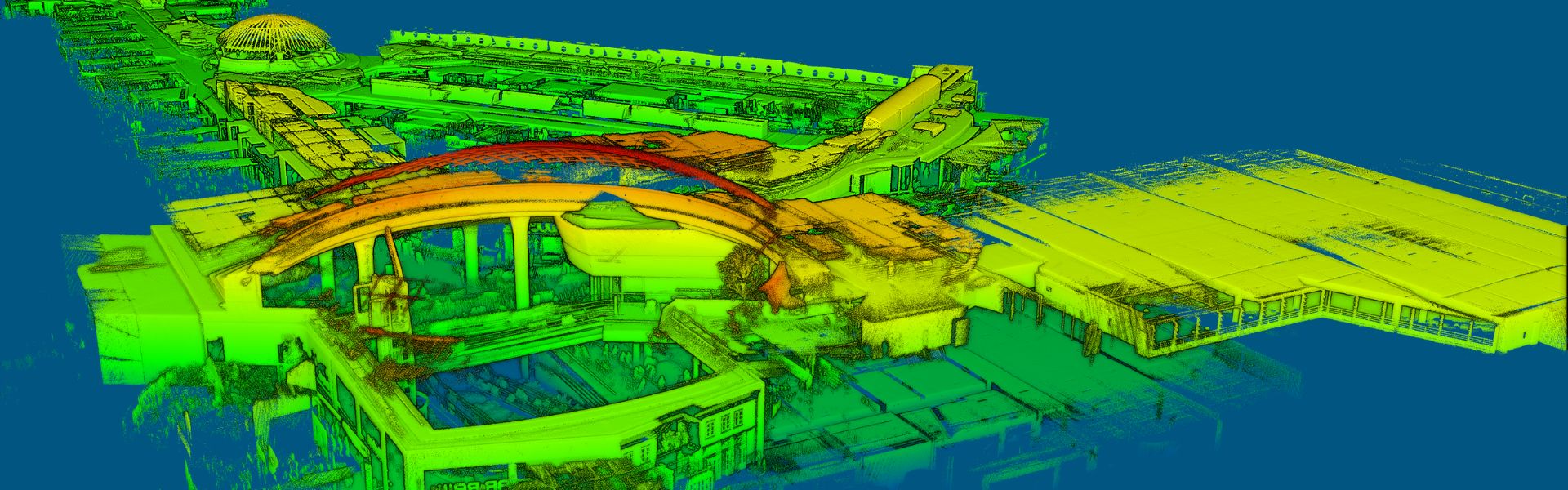
De vuelta en la oficina, el usuario inicia el software de post-procesamiento INS/GNSS para aumentar la precisión de la orientación y la posición, y luego utiliza el software VIAMETRIS para georreferenciar y colorear la nube de puntos.
Los datos recopilados están listos para ser importados al software de diseño más común. Este flujo de trabajo se acelera 7 veces en comparación con un método tradicional.
No faltan datos; la nube de puntos se puede utilizar para mediciones adicionales, lo que significa una economía de tiempo y gastos de viaje.
Además del rendimiento probado del bMS3D-360, algunos detalles marcan la diferencia en el mercado, como la cámara 360 ubicada en un poste retráctil para un campo de visión más amplio cuando se despliega, y una mayor seguridad cuando se retrae (algunos techos pueden ser muy bajos, en aparcamientos, por ejemplo).
Es la única mochila que ofrece una cámara de este tipo, lo que simplifica enormemente el trabajo de tratamiento. Al navegar en la nube de puntos, el usuario abre una imagen única del entorno escaneado de 360° en lugar de mirar 4 puntos de vista de cámara diferentes.
Cuando el GNSS se enfrenta a fuentes de perturbación, el INS mantiene la trayectoria donde la tecnología SLAM está limitada.
El INS RTK para ayudar al cálculo SLAM
El Ellipse-D es un sistema de navegación inercial muy compacto que integra un receptor GNSS L1/L2. Este INS de grado industrial calcula el balanceo, el cabeceo, el rumbo y la posición gracias al filtrado de Kalman extendido integrado.
En tiempo real, los datos de orientación del Ellipse-D se utilizan para corregir la actitud del equipo y ayudar al rumbo calculado por SLAM.
De hecho, si el rumbo basado en SLAM se proporciona a 20 Hz, el rumbo basado en inercia se entrega a 200 Hz. Entre dos informaciones SLAM, el INS mantiene el rumbo robusto.
El receptor GNSS proporciona un posicionamiento absoluto a la nube de puntos y añade una restricción de altitud. Además, cuando las perturbaciones afectan al GNSS, el INS mantiene la trayectoria donde la tecnología SLAM falla. Por ejemplo, en los aparcamientos sin objetos cercanos para la medición LiDAR, el INS garantiza una navegación precisa.
Jérôme Ninot, fundador de VIAMETRIS, explica esta elección: “Hace años que trabajamos con SBG Systems y la gama Ellipse en particular. Siempre hemos confiado en estos robustos sensores inerciales, así que cuando tuvimos que elegir un sistema INS/GNSS para nuestra mochila, nos alegramos de que el Ellipse-D ya integrara un receptor GNSS.”
Siempre es una ganancia de tiempo no integrar un equipo adicional, insiste Jérôme.

Ellipse-D
El Ellipse-D es un sistema de navegación inercial que integra una doble antena y un GNSS RTK de doble frecuencia que es compatible con nuestro software de post-procesamiento Qinertia.
Diseñado para aplicaciones robóticas y geoespaciales, puede fusionar la entrada del odómetro con Pulse o CAN OBDII para mejorar la precisión de la navegación a estima.

Solicite un presupuesto para Ellipse-D
¿Tiene alguna pregunta?
¡Bienvenido a nuestra sección de preguntas frecuentes! Aquí encontrará respuestas a las preguntas más comunes sobre las aplicaciones que mostramos. Si no encuentra lo que busca, ¡no dude en ponerse en contacto con nosotros directamente!
¿Qué es GNSS vs GPS?
GNSS significa Sistema Global de Navegación por Satélite y GPS para Sistema de Posicionamiento Global. Estos términos se utilizan a menudo indistintamente, pero se refieren a conceptos diferentes dentro de los sistemas de navegación por satélite.
GNSS es un término colectivo que engloba a todos los sistemas de navegación por satélite, mientras que GPS se refiere específicamente al sistema estadounidense. El GNSS incluye múltiples sistemas que proporcionan una cobertura global más completa, siendo GPS solo uno de ellos.
Se obtiene una mayor precisión y fiabilidad con GNSS, al integrar datos de múltiples sistemas, mientras que GPS por sí solo podría tener limitaciones dependiendo de la disponibilidad de satélites y las condiciones ambientales.
¿Cuál es la diferencia entre AHRS e INS?
La principal diferencia entre un sistema de referencia de actitud y rumbo (AHRS) y un sistema de navegación inercial (INS) radica en su funcionalidad y en el alcance de los datos que proporcionan.
El AHRS proporciona información de orientación, concretamente, la actitud (cabeceo, balanceo) y el rumbo (guiñada) de un vehículo o dispositivo. Normalmente, utiliza una combinación de sensores, como giroscopios, acelerómetros y magnetómetros, para calcular y estabilizar la orientación. El AHRS emite la posición angular en tres ejes (cabeceo, balanceo y guiñada), lo que permite a un sistema comprender su orientación en el espacio. A menudo se utiliza en la aviación, los UAV, la robótica y los sistemas marinos para proporcionar datos precisos de actitud y rumbo, que son fundamentales para el control y la estabilización del vehículo.
Un INS no solo proporciona datos de orientación (como un AHRS), sino que también rastrea la posición, la velocidad y la aceleración de un vehículo a lo largo del tiempo. Utiliza sensores inerciales para estimar el movimiento en el espacio 3D sin depender de referencias externas como el GNSS. Combina los sensores que se encuentran en el AHRS (giroscopios, acelerómetros), pero también puede incluir algoritmos más avanzados para el seguimiento de la posición y la velocidad, a menudo integrándose con datos externos como el GNSS para mejorar la precisión.
En resumen, el AHRS se centra en la orientación (actitud y rumbo), mientras que el INS proporciona un conjunto completo de datos de navegación, incluyendo posición, velocidad y orientación.
¿Cuál es la diferencia entre IMU e INS?
La diferencia entre una unidad de medición inercial (IMU) y un sistema de navegación inercial (INS) radica en su funcionalidad y complejidad.
Una IMU unidad de medición inercial) proporciona datos brutos sobre la aceleración lineal y la velocidad angular del vehículo, medidos por acelerómetros y giroscopios. Proporciona información sobre el balanceo, el cabeceo, el guiñada y el movimiento, pero no calcula datos de posición ni de navegación. La IMU diseñada específicamente para transmitir datos esenciales sobre el movimiento y la orientación para su procesamiento externo con el fin de determinar la posición o la velocidad.
Por otro lado, un INS sistema de navegación inercial) combina IMU con algoritmos avanzados para calcular la posición, la velocidad y la orientación de un vehículo a lo largo del tiempo. Incorpora algoritmos de navegación como el filtrado de Kalman para la fusión e integración de sensores. Un INS datos de navegación en tiempo real, incluyendo posición, velocidad y orientación, sin depender de sistemas de posicionamiento externos como GNSS.
Este sistema de navegación se utiliza normalmente en aplicaciones que requieren soluciones de navegación completas, especialmente en entornos GNSS, como los UAV militares, los buques y los submarinos.
¿Cómo puedo combinar sistemas inerciales con un LIDAR para la cartografía con drones?
La combinación de los sistemas inerciales de SBG Systems con LiDAR para el mapeo con drones mejora la precisión y la fiabilidad en la captura de datos geoespaciales precisos.
Así es como funciona la integración y cómo beneficia a la cartografía basada en drones:
- Un método de teledetección que utiliza pulsos láser para medir distancias a la superficie de la Tierra, creando un mapa 3D detallado del terreno o las estructuras.
- El INS de SBG Systems combina una unidad de medición inercial (IMU) con datos GNSS para proporcionar un posicionamiento, orientación (cabeceo, balanceo, guiñada) y velocidad precisos, incluso en entornos sin cobertura GNSS.
El sistema inercial de SBG está sincronizado con los datos del LiDAR. El INS rastrea con precisión la posición y la orientación del dron, mientras que el LiDAR captura los detalles del terreno o del objeto que se encuentra debajo.
Al conocer la orientación precisa del dron, los datos LiDAR se pueden posicionar con precisión en el espacio 3D.
El componente GNSS proporciona posicionamiento global, mientras que la IMU ofrece datos de orientación y movimiento en tiempo real. La combinación asegura que, incluso cuando la señal GNSS es débil o no está disponible (por ejemplo, cerca de edificios altos o bosques densos), el INS pueda continuar rastreando la trayectoria y la posición del dron, lo que permite un mapeo LiDAR consistente.
¿Qué significan las siglas SLAM (Simultaneous Localization and Mapping)?
Localización y Mapeo Simultáneos (SLAM) es una técnica computacional que permite a un robot, vehículo o dispositivo construir un mapa de un entorno desconocido mientras determina simultáneamente su propia posición dentro de ese mapa.
Combina datos de varios sensores (por ejemplo, cámaras, LiDAR, radar, IMUs, GNSS) con algoritmos como el filtrado o la optimización para lograr el mapeo y la navegación en tiempo real.
SLAM permite a los sistemas autónomos navegar y comprender su entorno sin mapas previos ni GPS.
