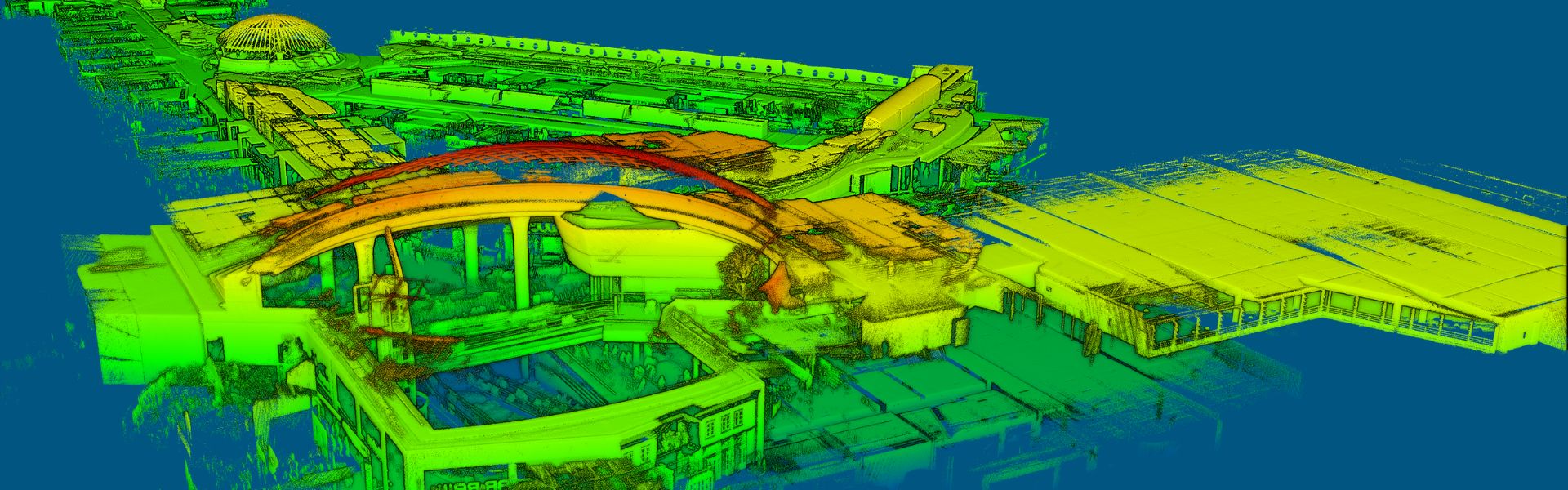
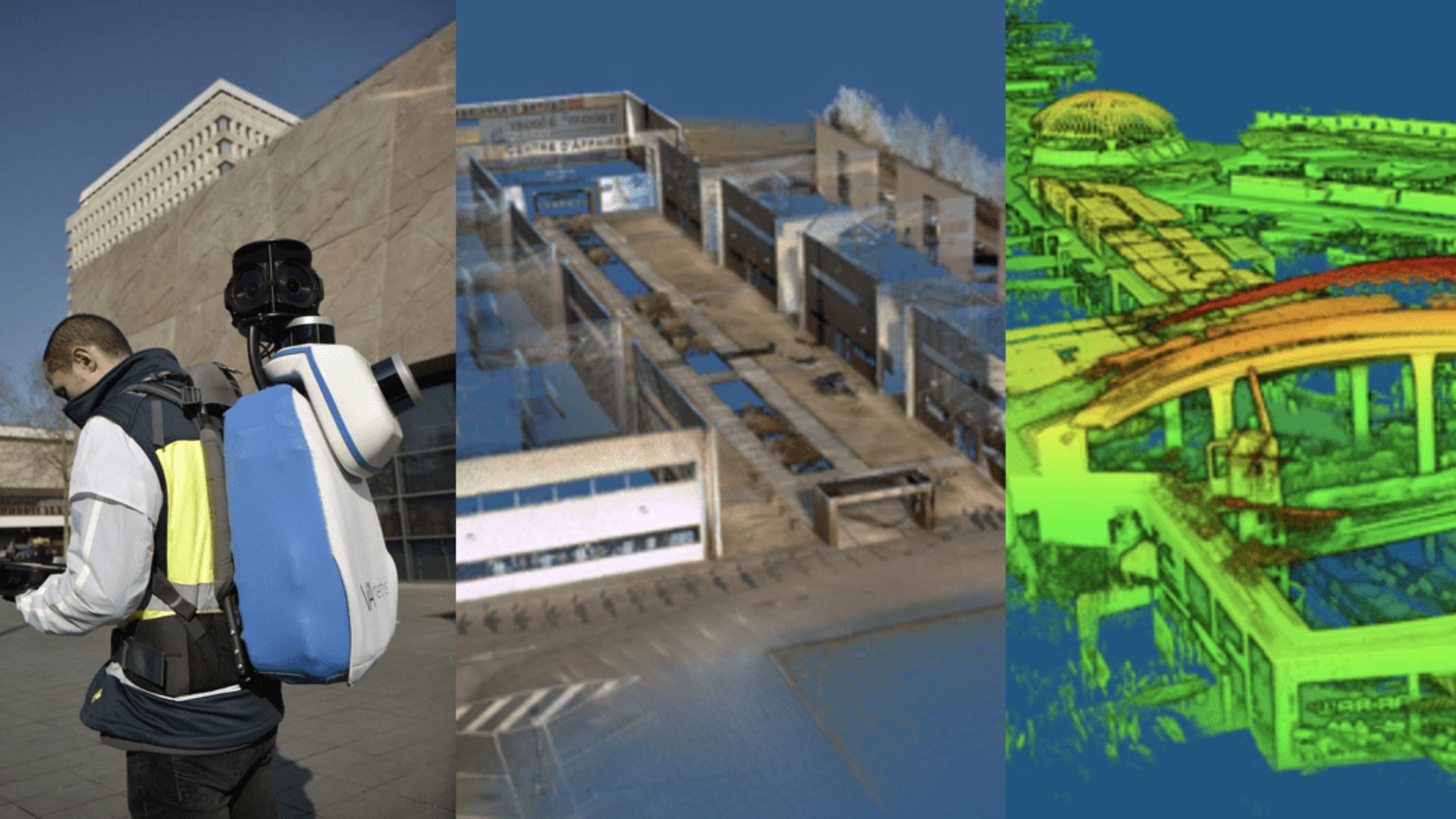
使用背包进行室内测绘
Ellipse-D RTK INS 有助于 SLAM 计算,同步 LiDAR 和相机。
“多年来,我们一直与 SBG Systems 合作,尤其是 Ellipse 系列。我们一直依赖这些强大的惯性传感器。” | VIAMETRIS 创始人 Jérôme N.
基于背包的移动扫描系统
bMS3D-360 专为最具挑战性的环境而设计。 它嵌入了两个 Velodyne LiDAR 传感器、一个 360 Lady-bug 相机、Ellipse-D SBG 惯性导航系统(带有内部 L1/L2 GNSS 接收器)和一台计算机。
工作流程加快了 7 倍
工作流程很简单。测量员启动系统,在平板电脑上检查 GNSS 和惯性信息是否已计算出来,然后开始测量。
回到办公室后,用户启动 INS/GNSS 后处理软件以提高姿态和位置精度,然后使用 VIAMETRIS 软件对点云进行地理配准和着色。
收集的数据可以导入到最常用的设计软件中。与传统方法相比,此工作流程加快了 7 倍。
没有数据丢失;点云可用于进一步的测量,这意味着节省时间和差旅费用。
除了 bMS3D-360 经过验证的性能外,一些细节也使它在市场上脱颖而出,例如位于可伸缩杆上的 360 度摄像头,可在展开时提供更大的视野,并在缩回时提供更高的安全性(例如,在停车场中,某些屋顶可能非常低)。
它是唯一一款提供这种摄像头的背包,大大简化了处理工作。在点云中导航时,用户可以打开 360° 扫描环境的独特图片,而不是查看 4 个不同摄像头的视角。
当 GNSS 面临干扰源时,INS 会保持轨迹,而 SLAM 技术则受到限制。
RTK INS 辅助 SLAM 计算
Ellipse-D 是一款非常紧凑的惯性导航系统,集成了 L1/L2 GNSS 接收器。得益于嵌入式扩展卡尔曼滤波,这款工业级 INS 可计算横滚、俯仰、航向以及位置。
实时地,Ellipse-D 方向数据用于校正设备姿态并帮助 SLAM 计算航向。
事实上,如果以 20 Hz 的频率提供基于 SLAM 的航向,则以 200Hz 的频率提供基于惯性的航向。在两个 SLAM 信息之间,INS 保持航向的稳健性。
GNSS 接收器为点云提供绝对定位并添加高度约束。此外,当干扰影响 GNSS 时,INS 会在 SLAM 技术失效的地方保持轨迹。例如,在没有附近物体进行 LiDAR 测量的停车场中,INS 可确保准确的导航。
VIAMETRIS 创始人 Jérôme Ninot 解释了这一选择:“多年来,我们一直与 SBG Systems 合作,尤其是 Ellipse 系列。我们一直依赖这些强大的惯性传感器,因此,当我们需要为我们的背包选择 INS/GNSS 系统时,我们很高兴 Ellipse-D 已经集成了 GNSS 接收器。”
Jérôme 坚持认为,不集成额外的设备总是可以节省时间。

Ellipse-D
Ellipse-D 是一款惯性导航系统,集成了双天线和双频 RTK GNSS,与我们的后处理软件 Qinertia 兼容。
专为机器人和地理空间应用而设计,它可以将里程计输入与 Pulse 或 CAN OBDII 融合,以提高航位推算精度。

请求 Ellipse-D 的报价
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
什么是 GNSS 与 GPS?
GNSS 代表全球导航卫星系统,GPS 代表 全球定位系统。这些术语经常互换使用,但它们在基于卫星的导航系统中指的是不同的概念。
GNSS 是所有卫星导航系统的统称,而 GPS 则特指美国的系统。GNSS 包含多个系统,提供更全面的全球覆盖,而 GPS 只是这些系统中的一个。
通过集成来自多个系统的数据,您可以通过 GNSS 获得更高的精度和可靠性,而仅使用 GPS 可能会受到卫星可用性和环境条件的限制。
AHRS 和 INS 之间有什么区别?
姿态和航向参考系统 (AHRS) 与惯性导航系统 (INS) 之间的主要区别在于它们的功能和提供的数据范围。
AHRS 提供方向信息,特别是车辆或设备的姿态(俯仰、横滚)和航向(偏航)。它通常使用陀螺仪、加速度计和磁力计等传感器的组合来计算和稳定方向。AHRS 输出三个轴(俯仰、横滚和偏航)中的角位置,使系统能够了解其在空间中的方向。它通常用于航空、无人机、机器人和船舶系统中,以提供准确的姿态和航向数据,这对于车辆控制和稳定至关重要。
INS 不仅提供方向数据(如 AHRS),还跟踪车辆随时间推移的位置、速度和加速度。它使用惯性传感器来估计 3D 空间中的运动,而无需依赖 GNSS 等外部参考。它结合了 AHRS 中的传感器(陀螺仪、加速度计),但也可能包括更高级的位置和速度跟踪算法,通常与 GNSS 等外部数据集成以提高精度。
总而言之,AHRS 侧重于方向(姿态和航向),而 INS 提供全套导航数据,包括位置、速度和方向。
IMU 和 INS 之间有什么区别?
惯性测量单元(IMU)与惯性导航系统(INS)的区别在于其功能和复杂程度。
IMU 惯性测量单元)通过加速度计和陀螺仪测量车辆的线性加速度和角速度,并提供原始数据。它提供关于横滚、俯仰、偏航及运动状态的信息,但不会计算位置或导航数据。IMU 传输有关运动和姿态的基本数据,供外部处理以确定位置或速度。
另一方面,INS 惯性导航系统)结合了 IMU 数据与先进算法相结合,计算车辆随时间变化的位置、速度和姿态。它集成了卡尔曼滤波等导航算法,用于传感器融合与数据整合。INS 包括位置、速度和姿态在内的实时导航数据,且无需依赖GNSS外部定位系统。
该导航系统通常应用于需要全面导航解决方案的场景,GNSS的环境中,例如军用无人机、船舶和潜艇。
如何将惯性系统与激光雷达结合用于无人机测绘?
将 SBG Systems 的惯性系统与 LiDAR 结合用于无人机测绘,可提高捕获精确地理空间数据的准确性和可靠性。
以下是集成的工作原理以及它如何使基于无人机的测绘受益:
- 一种遥感方法,使用激光脉冲测量到地球表面的距离,从而创建地形或结构的详细 3D 地图。
- SBG Systems INS 将惯性测量单元 (IMU) 与 GNSS 数据相结合,即使在 GNSS 受限的环境中也能提供精确定位、姿态(俯仰、横滚、偏航)和速度。
SBG 的惯性系统与 LiDAR 数据同步。INS 精确跟踪无人机的位置和方向,而 LiDAR 捕获下方地形或物体的细节。
通过了解无人机的精确方向,LiDAR数据可以准确定位在3D空间中。
GNSS 组件提供全局定位,而 IMU 提供实时姿态和运动数据。这种组合确保即使在 GNSS 信号较弱或不可用时(例如,在高层建筑物或茂密的森林附近),INS 也可以继续跟踪无人机的路径和位置,从而实现一致的 LiDAR 测绘。
什么是同步定位与地图构建?
同步定位与建图 (SLAM) 是一种计算技术,允许机器人、车辆或设备在构建未知环境地图的同时,确定其在该地图中的自身位置。
它结合了来自各种传感器(例如,摄像头、LiDAR、雷达、IMU、GNSS)的数据,并利用滤波或优化等算法,以实现实时建图和导航。
SLAM 使自主系统能够在没有预先地图或 GPS 的情况下导航并理解其周围环境。
