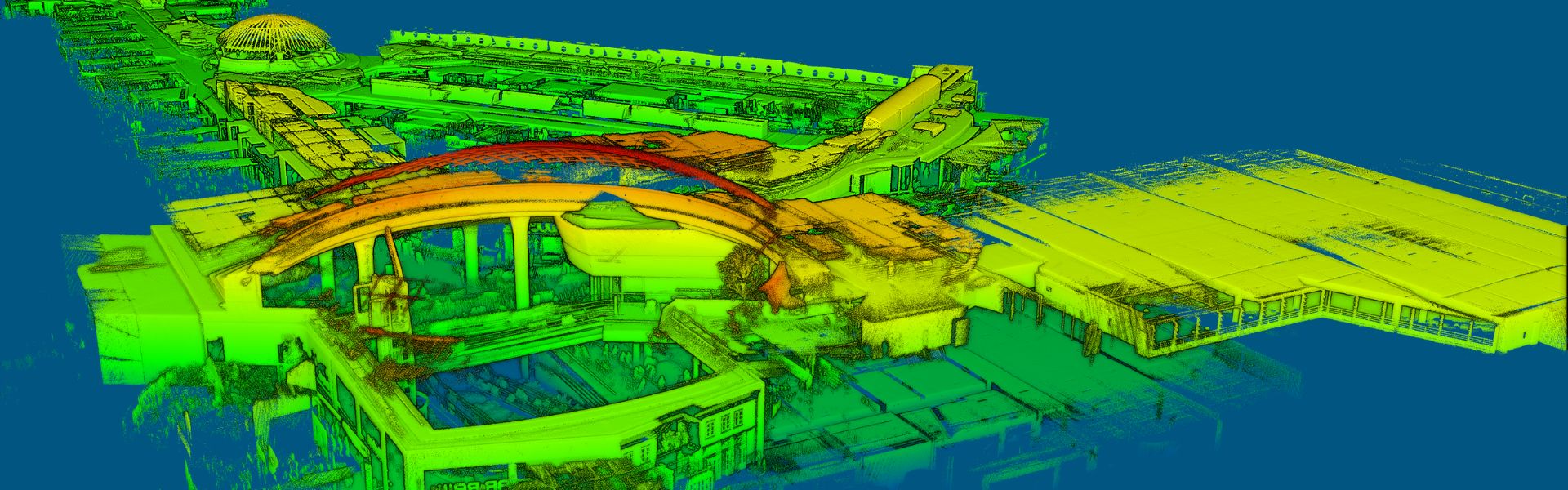
Mapeamento Interno com Mochila
O Ellipse-D RTK INS ajuda na computação SLAM, sincroniza LiDAR e Câmera.
“Já faz anos que trabalhamos com a SBG Systems e a Ellipse Series em particular. Sempre confiamos nesses sensores inerciais robustos.” | Jérôme N., Fundador da VIAMETRIS
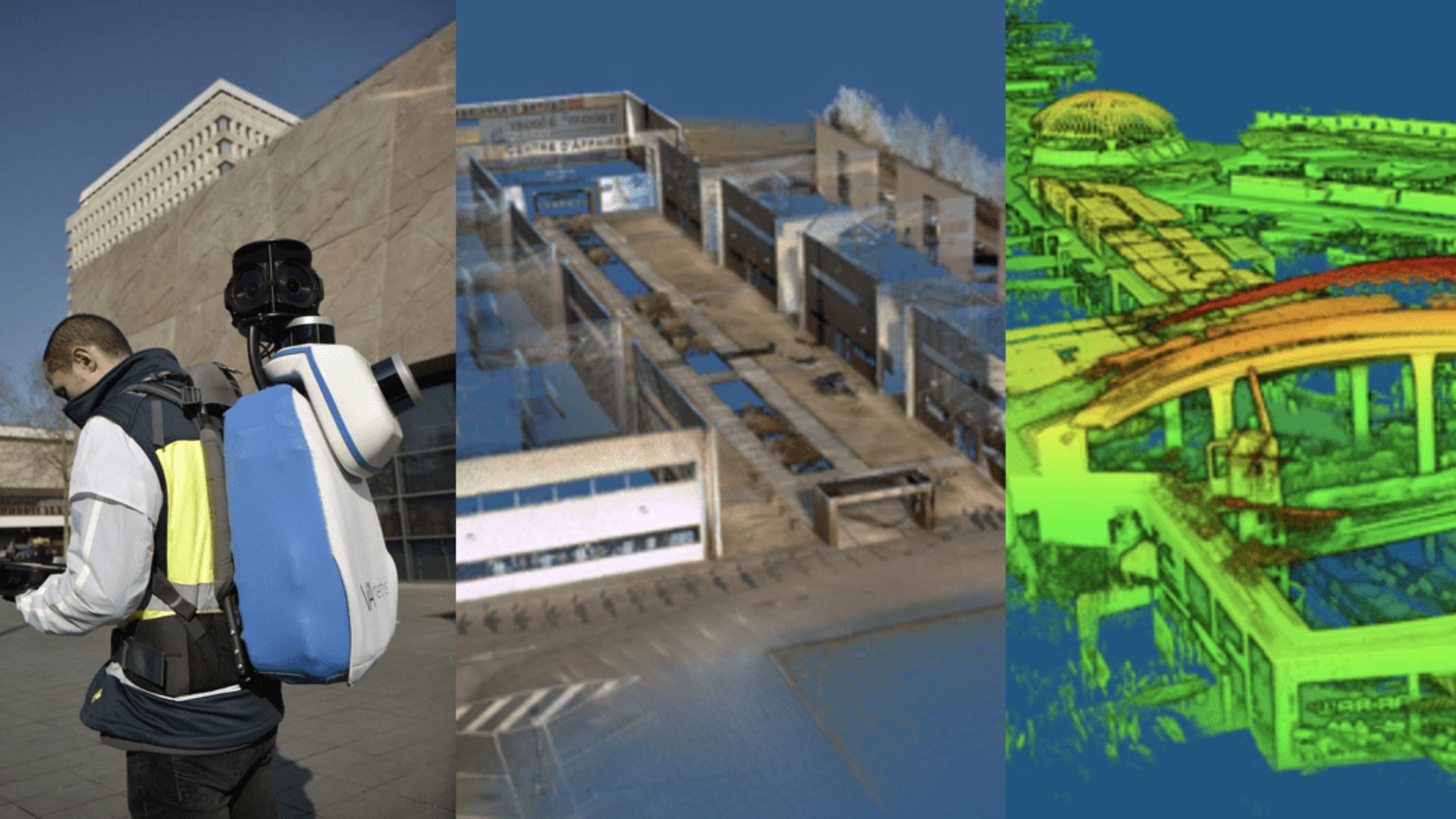
Sistema de Digitalização Móvel Baseado em Mochila
O bMS3D-360 foi projetado para os ambientes mais desafiadores. Ele incorpora dois sensores Velodyne LiDAR, uma câmera 360 Lady-bug, o Ellipse-D, o sistema de navegação inercial SBG com receptor GNSS L1/L2 interno e um computador.
Um fluxo de trabalho acelerado em 7 vezes
O fluxo de trabalho é simples. O topógrafo inicia o sistema, verifica em um tablet se as informações do GNSS e inercial estão sendo computadas e inicia o levantamento.
De volta ao escritório, o usuário executa o software de pós-processamento INS/GNSS para aumentar a precisão da orientação e posição e, em seguida, usa o software VIAMETRIS para georreferenciar e colorir a nuvem de pontos.
Os dados coletados estão prontos para serem importados para o software de design mais comum. Este fluxo de trabalho é acelerado 7 vezes em comparação com um método tradicional.
Não faltam dados; a nuvem de pontos pode ser usada para medições adicionais, o que significa uma economia de tempo e despesas de viagem.
Além do desempenho comprovado do bMS3D-360, alguns detalhes fazem a diferença no mercado, como a câmera 360 localizada em um poste retrátil para um campo de visão maior quando implantada e uma maior segurança quando retraída (alguns telhados podem ser muito baixos, em estacionamentos, por exemplo).
É a única mochila a oferecer tal câmera, o que simplifica muito o trabalho de tratamento. Ao navegar na nuvem de pontos, o usuário abre uma imagem única do ambiente escaneado em 360° em vez de olhar para 4 diferentes pontos de vista da câmera.
Quando o GNSS enfrenta fontes de perturbação, o INS mantém a trajetória onde a tecnologia SLAM é limitada.
O RTK INS para auxiliar no cálculo de SLAM
O Ellipse-D é um sistema de navegação inercial muito compacto que integra um receptor GNSS L1/L2. Este INS de nível industrial calcula roll, pitch, heading, bem como a posição, graças ao Extended Kalman Filtering incorporado.
Em tempo real, os dados de orientação do Ellipse-D são usados para corrigir a atitude do equipamento e ajudar no heading computado pelo SLAM.
De fato, se o heading baseado em SLAM for fornecido a 20 Hz, o heading baseado em inércia é fornecido a 200 Hz. Entre duas informações SLAM, o INS mantém o heading robusto.
O receptor GNSS fornece posicionamento absoluto para a nuvem de pontos e adiciona restrição de altitude. Além disso, quando distúrbios afetam o GNSS, o INS mantém a trajetória onde a tecnologia SLAM falha. Por exemplo, em estacionamentos sem objetos próximos para medição LiDAR, o INS garante uma navegação precisa.
Jérôme Ninot, fundador da VIAMETRIS, explica esta escolha: “Já faz anos que trabalhamos com a SBG Systems e a Ellipse Series em particular. Sempre confiamos nesses sensores inerciais robustos, então, quando se tratou de escolher um sistema INS/GNSS para nossa mochila, ficamos felizes que o Ellipse-D já estivesse integrando um receptor GNSS.”
É sempre um ganho de tempo não integrar um equipamento adicional, insiste Jérôme.

Ellipse-D
O Ellipse-D é um sistema de navegação inercial que integra uma antena dupla e um GNSS RTK de dupla frequência que é compatível com o nosso software de pós-processamento Qinertia.
Projetado para aplicações robóticas e geoespaciais, ele pode fundir a entrada do odômetro com Pulse ou CAN OBDII para maior precisão de dead-reckoning.

Solicite uma cotação para o Ellipse-D
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
O que é GNSS vs GPS?
GNSS significa Global Navigation Satellite System e GPS para Global Positioning System. Esses termos são frequentemente usados de forma intercambiável, mas se referem a conceitos distintos dentro dos sistemas de navegação baseados em satélite.
GNSS é um termo coletivo para todos os sistemas de navegação por satélite, enquanto o GPS se refere especificamente ao sistema dos EUA. Ele abrange múltiplos sistemas que fornecem uma cobertura global mais abrangente, enquanto o GPS é apenas um desses sistemas.
Você obtém maior precisão e confiabilidade com o GNSS, integrando dados de vários sistemas, enquanto o GPS sozinho pode ter limitações dependendo da disponibilidade de satélites e das condições ambientais.
Qual é a diferença entre AHRS e INS?
A principal diferença entre um Attitude and Heading Reference System (AHRS) e um Inertial Navigation System (INS) reside em sua funcionalidade e no escopo dos dados que eles fornecem.
O AHRS fornece informações de orientação — especificamente, a atitude (inclinação, rotação) e direção (guinada) de um veículo ou dispositivo. Ele normalmente usa uma combinação de sensores, incluindo giroscópios, acelerômetros e magnetômetros, para calcular e estabilizar a orientação. O AHRS emite a posição angular em três eixos (inclinação, rotação e guinada), permitindo que um sistema entenda sua orientação no espaço. É frequentemente usado em aviação, UAVs, robótica e sistemas marítimos para fornecer dados precisos de atitude e direção, o que é fundamental para o controle e estabilização do veículo.
Um INS não apenas fornece dados de orientação (como um AHRS), mas também rastreia a posição, velocidade e aceleração de um veículo ao longo do tempo. Ele usa sensores inerciais para estimar o movimento no espaço 3D sem depender de referências externas como GNSS. Ele combina os sensores encontrados em AHRS (giroscópios, acelerômetros), mas também pode incluir algoritmos mais avançados para rastreamento de posição e velocidade, muitas vezes integrando-se com dados externos como GNSS para maior precisão.
Em resumo, o AHRS se concentra na orientação (atitude e direção), enquanto o INS fornece um conjunto completo de dados de navegação, incluindo posição, velocidade e orientação.
Qual é a diferença entre IMU e INS?
A diferença entre uma Unidade de Medição Inercial (IMU) e um Sistema de Navegação Inercial (INS) reside em sua funcionalidade e complexidade.
Uma IMU unidade de medição inercial) fornece dados brutos sobre a aceleração linear e a velocidade angular do veículo, medidos por acelerômetros e giroscópios. Ela fornece informações sobre rotação, inclinação, guinada e movimento, mas não calcula dados de posição ou navegação. A IMU projetada especificamente para transmitir dados essenciais sobre movimento e orientação para processamento externo, a fim de determinar a posição ou a velocidade.
Por outro lado, um INS sistema de navegação inercial) combina IMU com algoritmos avançados para calcular a posição, a velocidade e a orientação de um veículo ao longo do tempo. Ele incorpora algoritmos de navegação, como a filtragem de Kalman, para fusão e integração de sensores. Um INS dados de navegação em tempo real, incluindo posição, velocidade e orientação, sem depender de sistemas de posicionamento externos, como GNSS.
Esse sistema de navegação é normalmente utilizado em aplicações que exigem soluções de navegação abrangentes, particularmente em ambientes GNSS, como UAVs militares, navios e submarinos.
Como posso combinar sistemas inerciais com um LIDAR para mapeamento com drones?
A combinação dos sistemas inerciais da SBG Systems com LiDAR para mapeamento com drones aumenta a precisão e a confiabilidade na captura de dados geoespaciais precisos.
Veja como a integração funciona e como ela beneficia o mapeamento baseado em drones:
- Um método de sensoriamento remoto que usa pulsos de laser para medir distâncias até a superfície da Terra, criando um mapa 3D detalhado do terreno ou das estruturas.
- O INS SBG Systems combina uma Unidade de Medição Inercial (IMU) com dados GNSS para fornecer posicionamento, orientação (pitch, roll, yaw) e velocidade precisos, mesmo em ambientes com restrição de GNSS.
O sistema inercial da SBG é sincronizado com os dados do LiDAR. O INS rastreia com precisão a posição e a orientação do drone, enquanto o LiDAR captura os detalhes do terreno ou do objeto abaixo.
Ao conhecer a orientação precisa do drone, os dados do LiDAR podem ser posicionados com precisão no espaço 3D.
O componente GNSS fornece posicionamento global, enquanto a IMU oferece dados de orientação e movimento em tempo real. A combinação garante que, mesmo quando o sinal GNSS é fraco ou indisponível (por exemplo, perto de edifícios altos ou florestas densas), o INS pode continuar a rastrear o caminho e a posição do drone, permitindo um mapeamento LiDAR consistente.
O que significa localização e mapeamento simultâneos?
Localização e Mapeamento Simultâneos (SLAM) é uma técnica computacional que permite a um robô, veículo ou dispositivo construir um mapa de um ambiente desconhecido enquanto determina simultaneamente sua própria posição dentro desse mapa.
Ele combina dados de vários sensores (por exemplo, câmeras, LiDAR, radar, IMUs, GNSS) com algoritmos como filtragem ou otimização para alcançar mapeamento e navegação em tempo real.
O SLAM permite que sistemas autônomos naveguem e compreendam seus arredores sem mapas prévios ou GPS.
