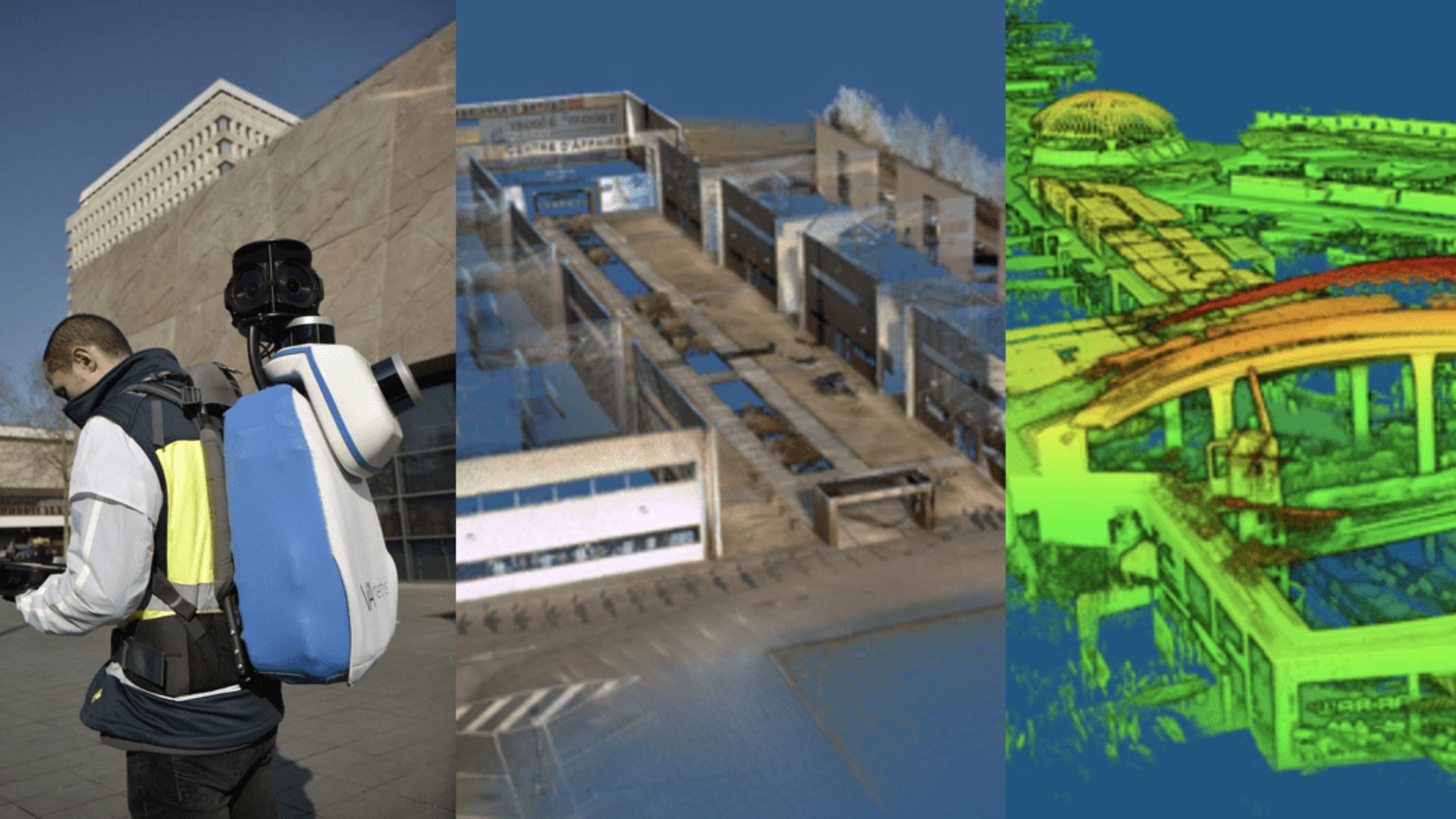
バックパックを使用した屋内マッピング
Ellipse-D RTK INSは、SLAM計算を支援し、LiDARとカメラを同期します。
“SBG SystemsとEllipseシリーズとは長年協力してきました。私たちは常にこれらの堅牢な慣性センサーに依存してきました。” | VIAMETRIS創設者、Jérôme N.
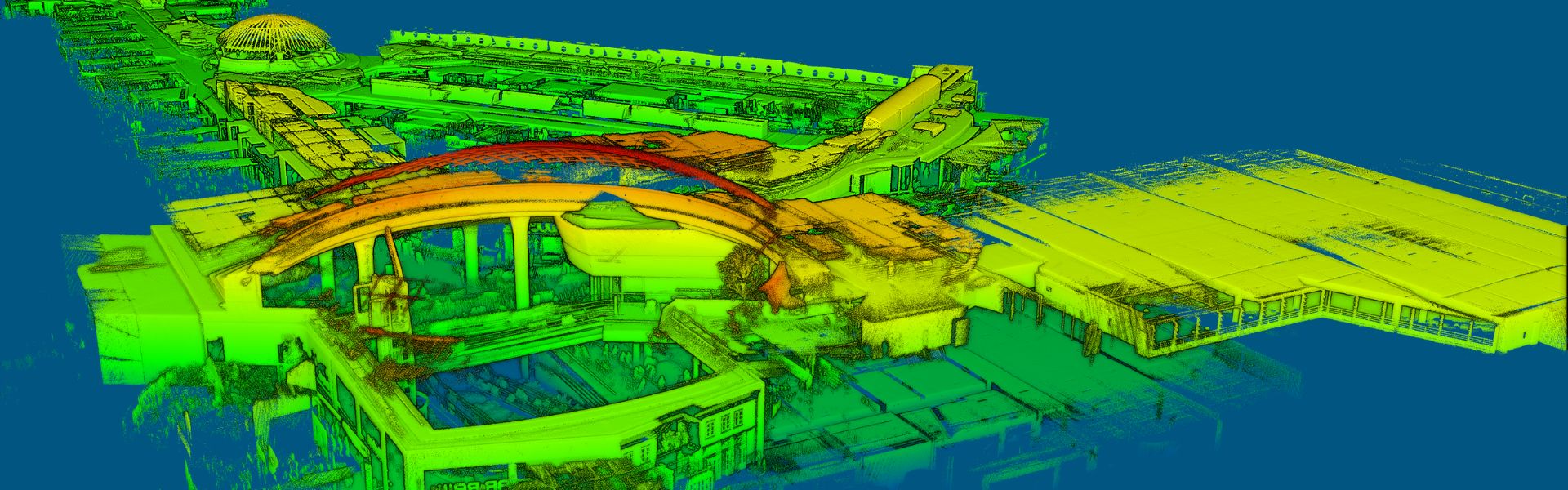
バックパック型モバイルスキャンシステム
bMS3D-360は、最も困難な環境向けに設計されています。2つのVelodyne LiDARセンサー、360 Lady-bugカメラ、Ellipse-D、SBGの慣性航法システム(内部L1/L2 GNSS受信機付き)、およびコンピューターが組み込まれています。
7倍に迅速化されたワークフロー
ワークフローは簡単です。測量技師はシステムを起動し、タブレットでGNSSと慣性情報が計算されていることを確認し、測量を開始します。
オフィスに戻ったら、INS/GNSS後処理ソフトウェアを起動して姿勢と位置の精度を高め、次にVIAMETRISソフトウェアを使用して点群を地理参照し、色付けします。
収集されたデータは、最も一般的な設計ソフトウェアにインポートする準備ができています。このワークフローは、従来の方法と比較して7倍高速化されます。
データが欠落することはありません。点群はさらなる測定に使用できるため、時間と旅費を節約できます。
bMS3D-360の実証済みの性能に加えて、展開時に広い視野を確保するための格納式ポールに配置された360度カメラや、格納時の高いセキュリティ(たとえば、駐車場など、屋根が非常に低い場所があります)など、いくつかの詳細が市場での差別化につながっています。
このようなカメラを提供する唯一のバックパックであり、処理作業を大幅に簡素化します。点群内をナビゲートするとき、ユーザーは4つの異なるカメラの視点を見る代わりに、スキャンされた360度の環境のユニークな画像を開きます。
GNSSが妨害源に直面した場合、INSはSLAM技術が制限されている場所で軌道を維持します。
SLAM計算を支援するRTK INS
Ellipse-Dは、L1/L2 GNSS受信機を統合した非常にコンパクトな慣性航法システムです。この産業用グレードのINSは、組み込みの拡張カルマンフィルタリングのおかげで、ロール、ピッチ、ヘディング、および位置を計算します。
リアルタイムでは、Ellipse-Dの姿勢データを使用して、機器の姿勢を修正し、SLAMで計算されたヘディングを支援します。
実際、SLAMベースのヘディングが20 Hzで提供される場合、慣性ベースのヘディングは200Hzで配信されます。2つのSLAM情報の間で、INSはヘディングを堅牢に保ちます。
GNSS受信機は、ポイントクラウドに絶対位置決めを提供し、高度制約を追加します。さらに、GNSSが妨害された場合、INSはSLAMテクノロジーが失敗する場所で軌道を維持します。たとえば、LiDAR測定用の近くのオブジェクトがない駐車場では、INSは正確な航法を保証します。
VIAMETRISの創設者であるJérôme Ninotは、この選択について次のように説明しています。“SBG SystemsとEllipseシリーズとは長年協力してきました。私たちは常にこれらの堅牢な慣性センサーに依存してきたため、バックパック用のINS/GNSSシステムを選択する際に、Ellipse-DがすでにGNSS受信機を統合していることを嬉しく思いました。”
追加の機器を統合しないことは常に時間の節約になると、Jérômeは主張します。

Ellipse-D
Ellipse、デュアルアンテナおよびデュアル周波数RTKGNSS 統合した慣性航法システムGNSS 当社の後処理ソフトウェア「Qinertia」に対応しています。
ロボット工学および地理空間アプリケーション向けに設計されており、オドメーター Pulse OBDIIを融合させるGNSS 、推測航法の精度を向上させることができます。

Ellipse-D の見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も一般的な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
GNSS と GPS の違いとは?
GNSSはGlobal Navigation Satellite Systemの略であり、GPSはGlobal Positioning Systemの略です。これらの用語はしばしば混同して使用されますが、衛星測位システム内では異なる概念を指します。
GNSSは全ての衛星測位システムの総称であり、GPSは特に米国のシステムを指します。GNSSはより包括的なグローバルカバレッジを提供する複数のシステムを含みますが、GPSはそのシステムの一つに過ぎません。
GNSSを使用すると、複数のシステムからのデータを統合することで、精度と信頼性が向上します。GPS単独では、衛星の利用可能性や環境条件によっては制限がある場合があります。
AHRSとINSの違いは何ですか?
Attitude and Heading Reference System(AHRS)とInertial Navigation System(INS)の主な違いは、その機能と提供するデータの範囲にあります。
AHRS は、車両またはデバイスの姿勢(ピッチ、ロール)および方位(ヨー)に関する情報を提供します。通常、ジャイロスコープ、加速度計、磁力計などのセンサーの組み合わせを使用して、姿勢を計算および安定化します。AHRS は、3 軸(ピッチ、ロール、ヨー)の角度位置を出力し、システムが空間内での姿勢を理解できるようにします。航空、UAV、ロボット工学、および海洋システムで、正確な姿勢および方位データを提供するために使用されることが多く、これは車両の制御および安定化に不可欠です。
INSは、姿勢データ(AHRSなど)を提供するだけでなく、車両の位置、速度、および加速度を時間とともに追跡します。慣性センサーを使用して、GNSSのような外部参照に依存せずに、3D空間での動きを推定します。AHRS(ジャイロスコープ、加速度計)にあるセンサーを組み合わせますが、位置と速度の追跡のためのより高度なアルゴリズムも含まれる場合があり、多くの場合、精度を高めるためにGNSSのような外部データと統合されます。
要約すると、AHRSは向き(姿勢と方位)に焦点を当てていますが、INSは位置、速度、向きを含むナビゲーションデータの完全なスイートを提供します。
IMUとINSの違いは何ですか?
慣性計測ユニット(IMU)と慣性航法システム(INS)の違いは、その機能と複雑さにあります。
IMU 慣性計測装置)は、加速度計やジャイロスコープによって測定された、車両の直線加速度および角速度に関する生データを提供します。IMUは、ロール、ピッチ、ヨー、および運動に関する情報を提供しますが、位置や航法データを計算することはありません。IMU 、位置や速度を決定するための外部処理に向けて、運動や姿勢に関する必須データを中継するように特別にIMU 。
一方、INS 慣性航法システム)は IMU のデータと高度なアルゴリズムを組み合わせて、時間の経過に伴う車両の位置、速度、および姿勢を算出します。これには、センサーフュージョンや統合のためのカルマンフィルタリングなどのナビゲーションアルゴリズムが組み込まれています。INS 、GNSSのような外部測位システムに依存することなく、位置、速度、姿勢を含むリアルタイムのナビゲーションデータINS 。
このナビゲーションシステムは、特に軍事用UAV、船舶、潜水艦など、GNSS環境において、包括的なナビゲーションソリューションを必要とする用途で一般的に利用されています。
ドローンマッピングのために、慣性システムとLIDARを組み合わせるにはどうすればよいですか?
SBG Systemsの慣性システムとドローンマッピング用のLiDARを組み合わせることで、正確な地理空間データの取得における精度と信頼性が向上します。
この統合がどのように機能し、ドローンベースのマッピングにどのように役立つかを以下に示します。
- 地球の表面までの距離をレーザーパルスで測定し、地形や構造物の詳細な3Dマップを作成するリモートセンシング手法。
- SBG Systems INSは、慣性計測ユニット(IMU)とGNSSデータを組み合わせることで、GNSSが利用できない環境でも、正確な位置、姿勢(ピッチ、ロール、ヨー)、速度を提供します。
SBGの慣性システムは、LiDARデータと同期されています。INSは、ドローンの位置と姿勢を正確に追跡し、LiDARは下の地形またはオブジェクトの詳細をキャプチャします。
ドローンの正確な姿勢を知ることにより、LiDARデータを3D空間に正確に配置できます。
GNSSコンポーネントはグローバルな位置情報を提供し、IMUはリアルタイムの姿勢と移動データを提供します。この組み合わせにより、GNSS信号が弱い、または利用できない場合(例:高層ビルの近くや密集した森林)、INSはドローンの経路と位置を追跡し続けることができ、一貫したLiDARマッピングが可能になります。
同時 локализация and mappingとはどういう意味ですか?
自己位置推定と環境地図作成 (SLAM) は、ロボット、車両、またはデバイスが未知の環境の地図を構築しながら、同時にその地図内での自己位置を特定することを可能にする計算技術です。
これは、様々なセンサー(例:カメラ、LiDAR、レーダー、IMU、GNSS)からのデータと、フィルタリングや最適化などのアルゴリズムを組み合わせて、リアルタイムの地図作成とナビゲーションを実現します。
SLAMにより、自律システムは事前の地図やGPSなしで周囲をナビゲートし、その環境を理解することが可能になります。
