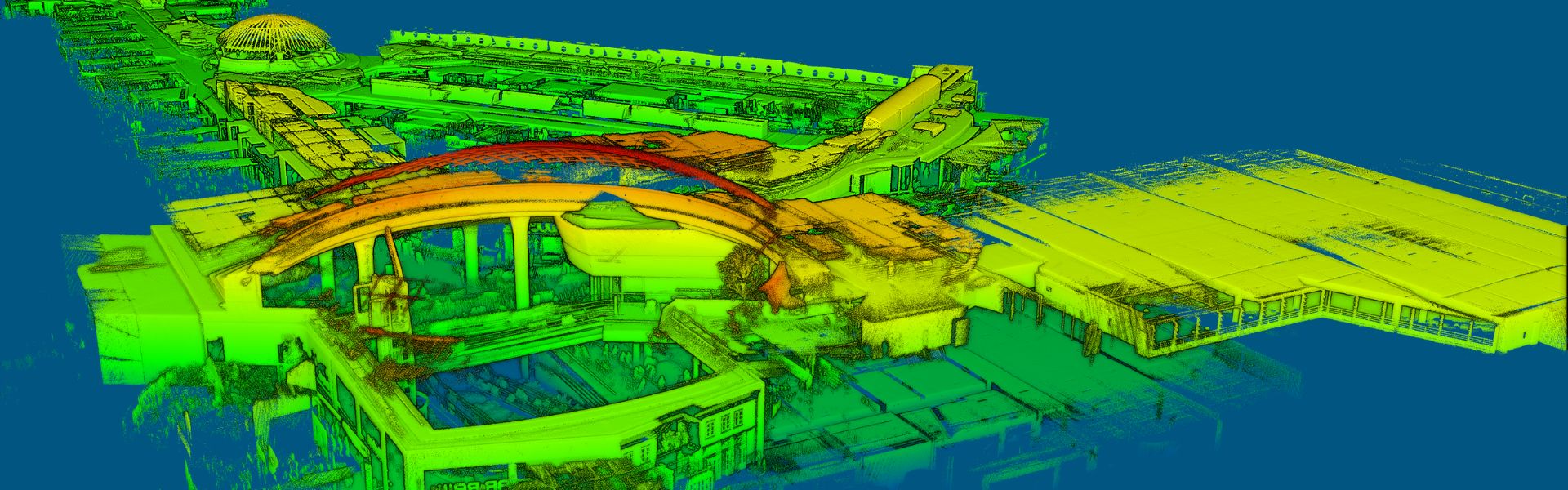
Створення карт приміщень за допомогою Back-pack
Система Ellipse RTK INS обчисленням SLAM та забезпечує синхронізацію даних з LiDAR і камери.
«Ми вже багато років співпрацюємо з SBG Systems зокрема використовуємо пристрої Ellipse . Ми завжди покладалися на ці надійні інерційні датчики». | Жером Н., засновник компанії VIAMETRIS
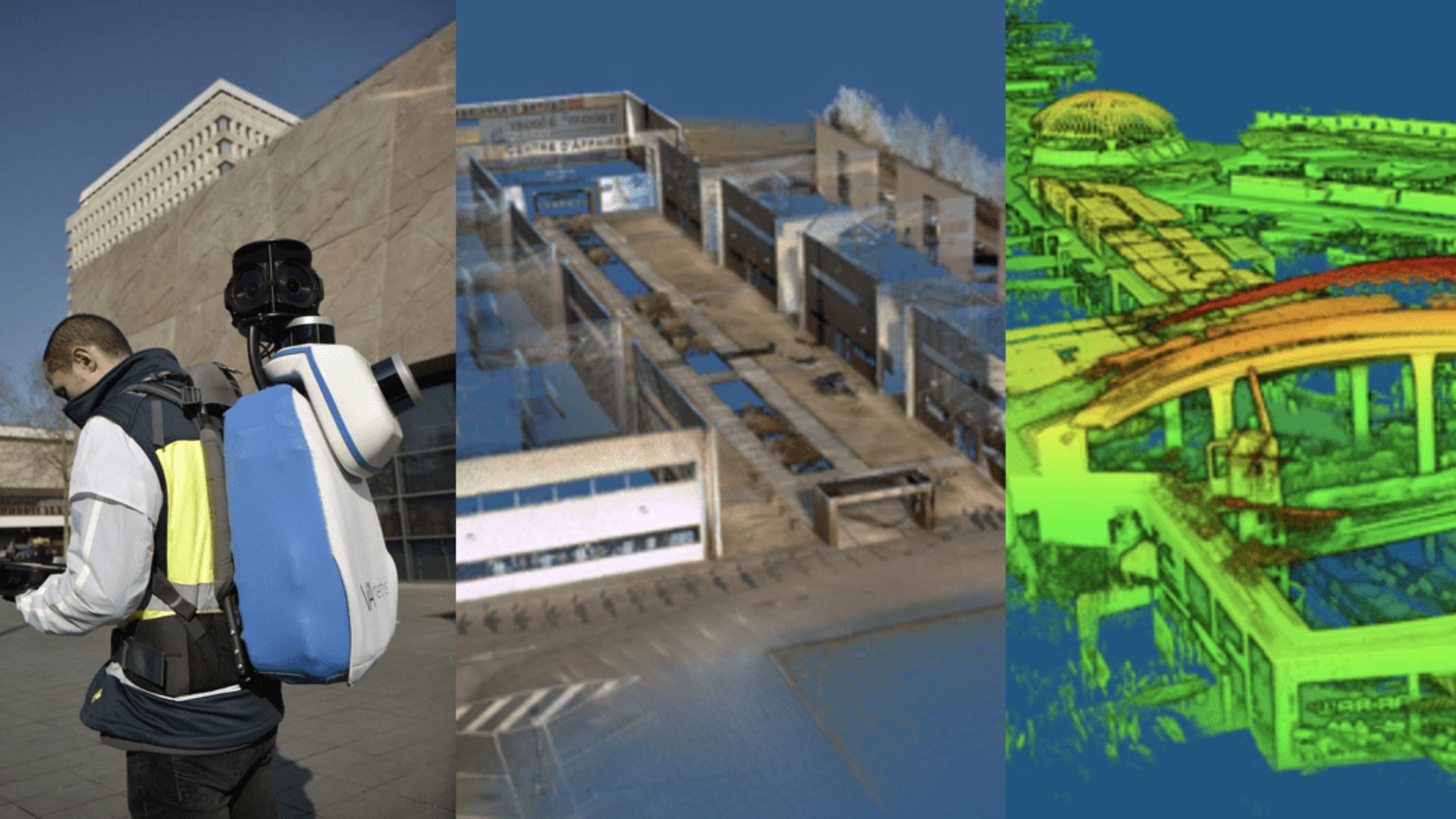
Мобільна система сканування на базі рюкзака
Система bMS3D-360 розроблена для роботи в найскладніших умовах. Вона оснащена двома датчиками LiDAR від Velodyne, камерою 360 Lady-bug, інерційною навігаційною системою Ellipse від SBG із вбудованим GNSS L1/L2, а також комп’ютером.
Процес, прискорений у 7 разів
Процес роботи простий. Геодезист запускає систему, перевіряє на планшеті, чи обчислені дані GNSS інерційної системи, і починає зйомку.
Повернувшись в офіс, користувач запускає програмне забезпеченняGNSS , щоб підвищити точність орієнтації та позиціонування, а потім використовує програмне забезпечення VIAMETRIS для геореференціювання та кольорового кодування хмари точок.
Зібрані дані готові до імпорту в найпоширеніше програмне забезпечення для проектування. Цей робочий процес прискорюється в 7 разів порівняно з традиційним методом.
Дані не втрачаються; хмару точок можна використовувати для подальших вимірювань, що означає економію часу та витрат на поїздки.
На додаток до перевіреної продуктивності bMS3D-360, деякі деталі роблять різницю на ринку, такі як 360-градусна камера, розташована на висувному стовпі для більшого поля зору під час розгортання та вищої безпеки у складеному стані (деякі дахи можуть бути дуже низькими, наприклад, на паркінгах).
Це єдиний рюкзак, що пропонує таку камеру, яка значно спрощує роботу з обробкою даних. Під час навігації в хмарі точок користувач відкриває єдине зображення 360°-ового сканованого середовища замість перегляду 4 різних ракурсів камери.
Коли GNSS джерелами перешкод, INS траєкторію там, де технологія SLAM має обмеження.
RTK INS система INS підтримки обчислень SLAM
Ellipse — це надзвичайно компактна інерційна навігаційна система, що інтегрує GNSS діапазонів L1/L2. Ця INS промислового класу INS roll, pitch та heading також координати завдяки вбудованому розширеному фільтру Калмана.
Дані про орієнтацію Ellipse використовуються в режимі реального часу для корекції положення обладнання та уточнення heading, обчисленого за допомогою SLAM.
Дійсно, якщо heading на основі SLAM heading з частотою 20 Гц, heading на основі інерційної навігації heading з частотою 200 Гц. Між двома даними SLAM INS heading .
GNSS забезпечує абсолютне позиціонування хмари точок та додає обмеження висоти. Більше того, коли GNSS впливають перешкоди, INS траєкторію там, де технологія SLAM виходить з ладу. Наприклад, на паркінгах, де немає об’єктів поблизу для вимірювання LiDAR, INS точну навігацію.
Жером Ніно (Jérôme Ninot), засновник VIAMETRIS, пояснює цей вибір: «Ми вже багато років працюємо з SBG Systems , SBG Systems зокрема з Ellipse . Ми завжди покладалися на ці надійні інерційні датчики, тому, коли прийшов час обиратиGNSS для нашого рюкзака, ми були раді, що Ellipse вже мала вбудований GNSS ».
« Заощадження часу завжди є перевагою, коли не потрібно інтегрувати додаткове обладнання » , — наголошує Жером.

Ellipse-D
Ellipse — це інерційна навігаційна система, GNSS поєднує в собі двоантенну двочастотну систему RTK GNSS сумісна з нашим програмним забезпеченням для пост-обробки даних Qinertia.
Розроблена для використання в робототехніці та геопросторових додатках, вона дозволяє об'єднувати дані одометра з Pulse даними CAN OBDII для підвищення dead-reckoning .

Запитайте ціну на Ellipse
У вас є питання?
Ласкаво просимо до розділу «Часті запитання»! Тут ви знайдете відповіді на найпоширеніші запитання щодо програм, які ми презентуємо. Якщо ви не знайдете потрібної інформації, звертайтеся до нас безпосередньо!
У чому різниця GNSS GPS?
GNSS «Глобальна навігаційна супутникова система», а GPS — «Глобальна система позиціонування». Ці терміни часто вживаються як синоніми, проте вони позначають різні поняття в рамках супутникових навігаційних систем.
GNSS загальний термін, що позначає всі супутникові навігаційні системи, тоді як GPS стосується саме американської системи. До GNSS входять численні системи, що забезпечують більш повне глобальне покриття, тоді як GPS є лише однією з цих систем.
Завдяки GNSS ви отримуєте вищу точність і надійність завдяки об’єднанню даних з декількох систем, тоді як використання лише GPS може мати певні обмеження, що залежать від наявності супутників та умов навколишнього середовища.
У чому полягає різниця між AHRS INS?
Основна відмінність між системою орієнтації та курсу (AHRS) та інерційною навігаційною системою (INS) полягає в їхній функціональності та обсязі даних, які вони надають.
AHRS інформацію про орієнтацію, а саме про положення (pitch, roll) та heading поворот) транспортного засобу або пристрою. Зазвичай вона використовує комбінацію датчиків, зокрема гіроскопів, акселерометрів та магнітометрів, для обчислення та стабілізації орієнтації. AHRS кутове положення по трьох осях (pitch, roll та відхилення), що дозволяє системі розуміти своє положення у просторі. Вона часто використовується в авіації, безпілотних літальних апаратах, робототехніці та морських системах для надання точних heading положення та heading , що є критично важливим для керування та стабілізації транспортного засобу.
Система INS тільки надає дані про орієнтацію (як і система AHRS), але й відстежує положення, швидкість та прискорення транспортного засобу в динаміці. Вона використовує інерційні датчики для оцінки руху в тривимірному просторі, не покладаючись на зовнішні джерела, такі як GNSS. Система поєднує датчики, що входять до складу AHRS гіроскопи, акселерометри), але також може містити більш досконалі алгоритми для відстеження положення та швидкості, часто інтегруючись із зовнішніми даними, такими як GNSS підвищення точності.
Отже, AHRS на орієнтації (кут нахилу та heading), тоді як INS повний набір навігаційних даних, включаючи координати, швидкість та орієнтацію.
У чому полягає різниця між IMU INS?
Різниця між інерційним вимірювальним блоком (IMU) та інерційною навігаційною системою (INS) полягає в їхній функціональності та складності.
IMU інерційний вимірювальний блок) надає необроблені дані про лінійне прискорення та кутову швидкість транспортного засобу, виміряні акселерометрами та гіроскопами. Він надає інформацію про roll, pitch, рискання та рух, але не обчислює дані про положення або навігацію. IMU спеціально IMU для передачі основних даних про рух та орієнтацію для зовнішньої обробки з метою визначення положення або швидкості.
З іншого боку, INS інерційна навігаційна система) поєднує IMU з передовими алгоритмами для обчислення положення, швидкості та орієнтації транспортного засобу в часі. Вона включає навігаційні алгоритми, такі як фільтрація Калмана, для злиття та інтеграції даних датчиків. INS навігаційні дані в режимі реального часу, включаючи положення, швидкість та орієнтацію, не покладаючись на зовнішні системи позиціонування, такі як GNSS.
Ця навігаційна система зазвичай використовується в додатках, що вимагають комплексних навігаційних рішень, особливо вdenied , таких як військові БПЛА, кораблі та підводні човни.
Як поєднати інерційні системи з лідаром для картографування за допомогою дронів?
Поєднання інерційних систем SBG Systemsз технологією LiDAR для картографування за допомогою дронів підвищує точність і надійність збору точних геопросторових даних.
Ось як працює ця інтеграція та які переваги вона дає для картографування за допомогою дронів:
- Метод дистанційного зондування, який використовує лазерні імпульси для вимірювання відстаней до поверхні Землі, створюючи детальну 3D-карту місцевості або споруд.
- SBG Systems INS інерційний вимірювальний блок (IMU) з GNSS , забезпечуючи точне визначення координат, орієнтації (pitch, roll, поворот) та швидкості навіть уdenied .
Інерційна система SBG синхронізована з даними LiDAR. Інерційна навігаційна система INS відстежує положення та орієнтацію дрона, тоді як LiDAR фіксує деталі місцевості або об’єктів, що знаходяться внизу.
Знаючи точне положення дрона, дані LiDAR можна точно розмістити у тривимірному просторі.
GNSS забезпечує глобальне позиціонування, а IMU дані про орієнтацію та рух у режимі реального часу. Таке поєднання гарантує, що навіть за умови слабкого або відсутнього GNSS (наприклад, поблизу висотних будівель або густих лісів) INS продовжувати відстежувати траєкторію та положення дрона, забезпечуючи безперебійне LiDAR-картування.
Що означає «одночасна локалізація та картографування»?
Одночасна локалізація та картографування (SLAM) — це обчислювальна технологія, яка дозволяє роботу, транспортному засобу або пристрою створювати карту невідомого оточення, одночасно визначаючи власне місцезнаходження на цій карті.
Вона поєднує дані з різних датчиків (наприклад, камер, LiDAR, радарів, інерційних вимірювальних систем, GNSS) з алгоритмами, такими як фільтрування або оптимізація, для забезпечення картографування та навігації в режимі реального часу.
SLAM дозволяє автономним системам орієнтуватися та розуміти оточення без попередніх карт або GPS.
