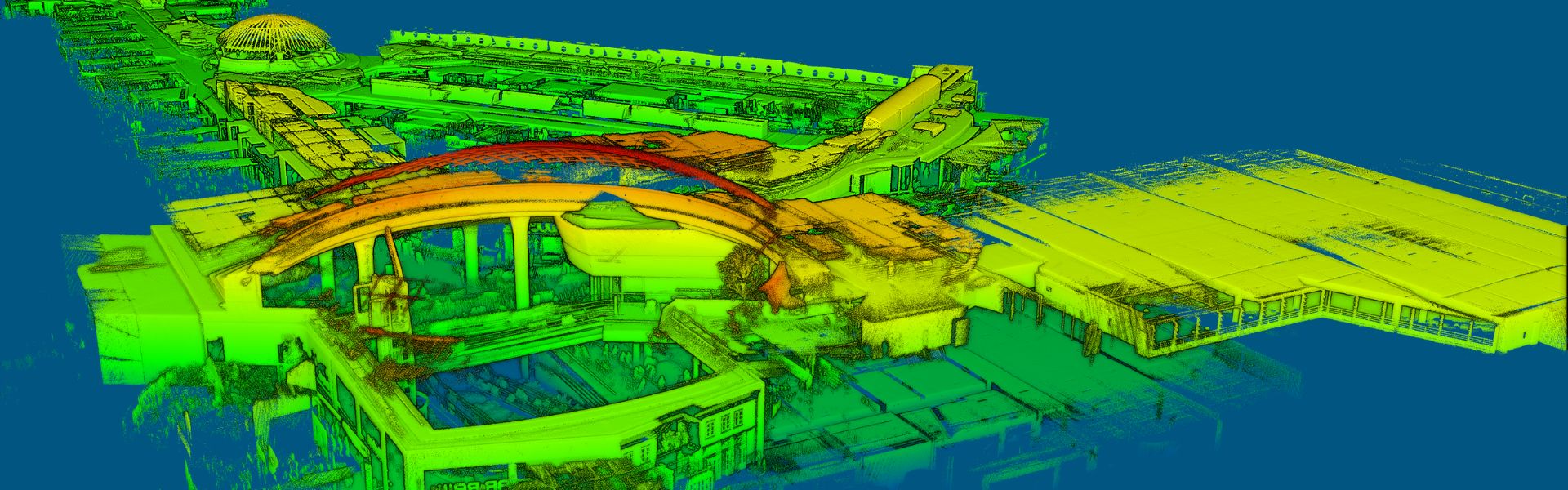
Mappatura di interni con zaino
L'Ellipse-D RTK INS facilita il calcolo SLAM, sincronizzando LiDAR e Camera.
“Sono anni che lavoriamo con SBG Systems e in particolare con la Serie Ellipse. Abbiamo sempre fatto affidamento su questi robusti sensori inerziali.” | Jérôme N., Fondatore di VIAMETRIS
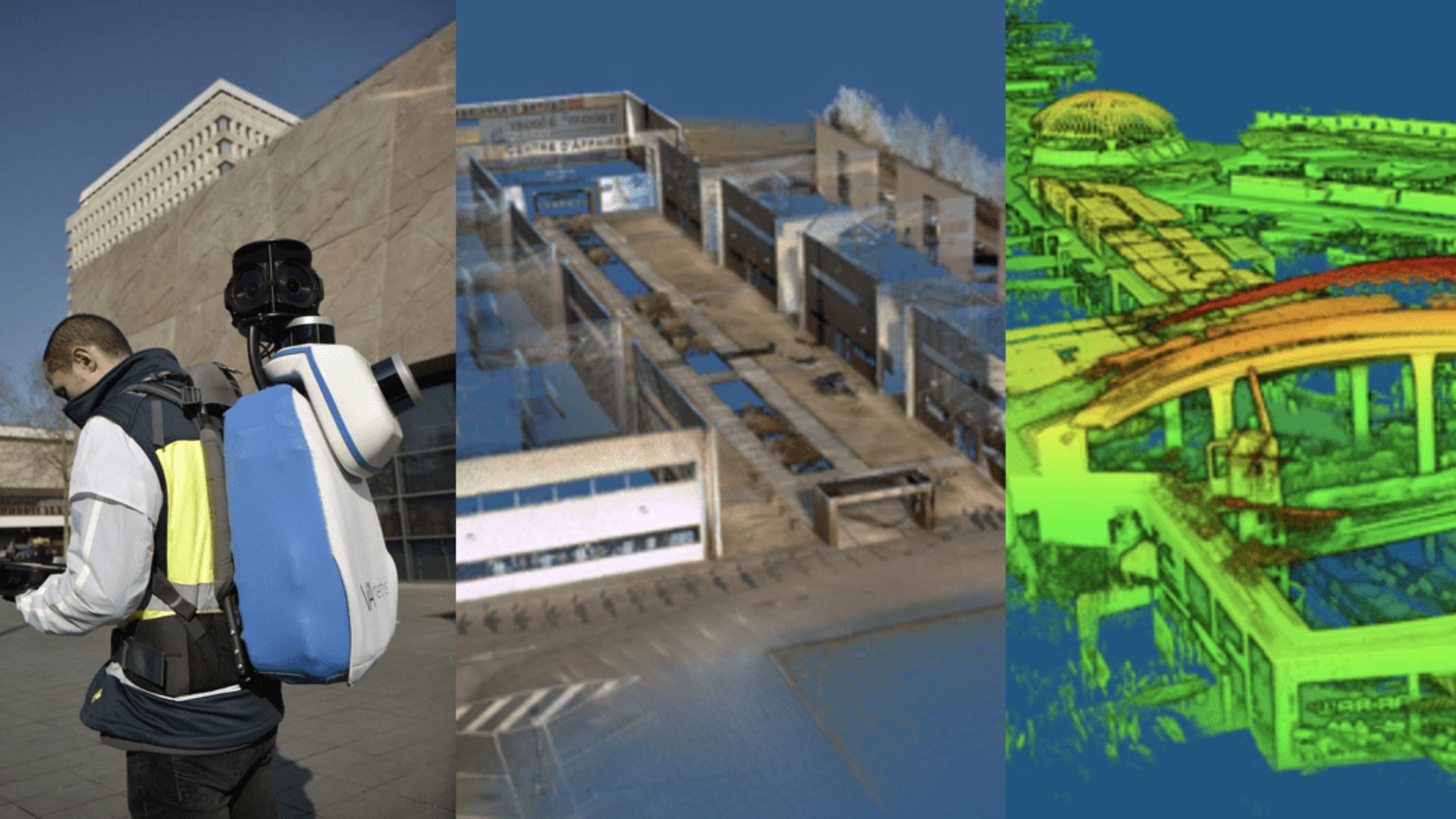
Sistema di Scansione Mobile Basato su Zaino
Il bMS3D-360 è stato progettato per gli ambienti più difficili. Integra due sensori Velodyne LiDAR, una telecamera Lady-bug a 360°, Ellipse-D, il sistema di navigazione inerziale SBG con ricevitore GNSS L1/L2 interno e un computer.
Un flusso di lavoro accelerato di 7 volte
Il workflow è semplice. Il geometra avvia il sistema, verifica su un tablet che le informazioni GNSS e inerziali siano calcolate, e inizia il rilievo.
Tornato in ufficio, l'utente avvia il software di post-elaborazione INS/GNSS per aumentare la precisione di orientamento e posizione, e quindi utilizza il software VIAMETRIS per georeferenziare e colorare la nuvola di punti.
I dati raccolti sono pronti per essere importati nei software di progettazione più comuni. Questo workflow è sette volte più veloce rispetto a un metodo tradizionale.
Non ci sono dati mancanti; la nuvola di punti può essere utilizzata per ulteriori misurazioni, il che significa un risparmio di tempo e spese di viaggio.
Oltre alle comprovate prestazioni del bMS3D-360, alcuni dettagli fanno la differenza sul mercato, come la telecamera a 360° posizionata su un palo retrattile per un campo visivo più ampio quando estesa, e una maggiore sicurezza quando retratta (alcuni tetti possono essere molto bassi, ad esempio nei parcheggi).
È l'unico zaino a offrire una telecamera di questo tipo che semplifica notevolmente il lavoro di elaborazione. Quando naviga nella nuvola di punti, l'utente apre un'unica immagine dell'ambiente scansionato a 360° invece di guardare 4 diversi punti di vista della telecamera.
Quando il GNSS affronta fonti di disturbo, l'INS mantiene la traiettoria dove la tecnologia SLAM è limitata.
L'INS RTK per supportare il calcolo SLAM
L'Ellipse-D è un sistema di navigazione inerziale molto compatto che integra un ricevitore GNSS L1/L2. Questo INS di grado industriale calcola rollio, beccheggio, heading e posizione grazie all'Extended Kalman Filtering integrato.
In tempo reale, i dati di orientamento dell'Ellipse-D vengono utilizzati per correggere l'assetto dell'attrezzatura e supportare l'heading calcolato dal SLAM.
Infatti, se l'heading basato su SLAM è fornito a 20 Hz, l'heading basato su inerziale è fornito a 200 Hz. Tra due informazioni SLAM, l'INS mantiene l'heading robusto.
Il ricevitore GNSS fornisce il posizionamento assoluto alla nuvola di punti e aggiunge un vincolo di altitudine. Inoltre, quando le perturbazioni influiscono sul GNSS, l'INS mantiene la traiettoria laddove la tecnologia SLAM fallisce. Ad esempio, nei parcheggi senza oggetti vicini per la misurazione LiDAR, l'INS garantisce una navigazione precisa.
Jérôme Ninot, fondatore di VIAMETRIS, spiega questa scelta: “Sono anni che lavoriamo con SBG Systems e in particolare con la serie Ellipse. Abbiamo sempre fatto affidamento su questi robusti sensori inerziali, quindi quando si è trattato di scegliere un sistema INS/GNSS per il nostro zaino, siamo stati lieti che l'Ellipse-D integrasse già un ricevitore GNSS.”
È sempre un risparmio di tempo non integrare un'attrezzatura aggiuntiva, insiste Jérôme.

Ellipse-D
L'Ellipse-D è un sistema di navigazione inerziale che integra una doppia antenna e un GNSS RTK a doppia frequenza compatibile con il nostro software di post-elaborazione Qinertia.
Progettato per applicazioni robotiche e geospaziali, può fondere l'input dell'odometro con Pulse o CAN OBDII per una maggiore accuratezza della navigazione stimata.

Richiedi un preventivo per Ellipse-D
Ha delle domande?
Benvenuti nella nostra sezione FAQ! Qui troverete le risposte alle domande più comuni sulle applicazioni che presentiamo. Se non trovate quello che state cercando, non esitate a contattarci direttamente!
Cos'è GNSS rispetto a GPS?
GNSS sta per Global Navigation Satellite System e GPS per Global Positioning System. Questi termini sono spesso usati in modo intercambiabile, ma si riferiscono a concetti diversi all'interno dei sistemi di navigazione satellitare.
GNSS è un termine collettivo per tutti i sistemi di navigazione satellitare, mentre il GPS si riferisce specificamente al sistema statunitense. Include diversi sistemi che forniscono una copertura globale più completa, mentre il GPS è solo uno di questi sistemi.
Si ottiene una maggiore accuratezza e affidabilità con GNSS, integrando i dati provenienti da più sistemi, mentre il solo GPS potrebbe avere delle limitazioni a seconda della disponibilità dei satelliti e delle condizioni ambientali.
Qual è la differenza tra AHRS e INS?
La principale differenza tra un Attitude and Heading Reference System (AHRS) e un Inertial Navigation System (INS) risiede nella loro funzionalità e nella portata dei dati che forniscono.
AHRS fornisce informazioni sull'orientamento, in particolare, l'assetto (beccheggio, rollio) e l'heading (imbardata) di un veicolo o dispositivo. In genere utilizza una combinazione di sensori, tra cui giroscopi, accelerometri e magnetometri, per calcolare e stabilizzare l'orientamento. L'AHRS restituisce la posizione angolare su tre assi (beccheggio, rollio e imbardata), consentendo a un sistema di comprendere il proprio orientamento nello spazio. Viene spesso utilizzato in aviazione, UAV, robotica e sistemi marini per fornire dati accurati di assetto e heading, fondamentali per il controllo e la stabilizzazione del veicolo.
Un INS non solo fornisce dati di orientamento (come un AHRS) ma traccia anche la posizione, la velocità e l'accelerazione di un veicolo nel tempo. Utilizza sensori inerziali per stimare il movimento nello spazio 3D senza fare affidamento su riferimenti esterni come il GNSS. Combina i sensori presenti negli AHRS (giroscopi, accelerometri) ma può anche includere algoritmi più avanzati per il tracciamento di posizione e velocità, spesso integrandosi con dati esterni come il GNSS per una maggiore precisione.
In sintesi, l'AHRS si concentra sull'orientamento (assetto e prua), mentre l'INS fornisce una suite completa di dati di navigazione, inclusi posizione, velocità e orientamento.
Qual è la differenza tra IMU e INS?
La differenza tra un'unità di misura inerziale (IMU) e un sistema di navigazione inerziale (INS) risiede nella loro funzionalità e complessità.
IMU unità di misura inerziale) fornisce dati grezzi sull'accelerazione lineare e sulla velocità angolare del veicolo, misurati da accelerometri e giroscopi. Fornisce informazioni su rollio, beccheggio, imbardata e movimento, ma non calcola la posizione né i dati di navigazione. IMU progettata specificamente per trasmettere dati essenziali sul movimento e sull'orientamento affinché vengano elaborati esternamente per determinare la posizione o la velocità.
D'altra parte, un INS sistema di navigazione inerziale) combina IMU con algoritmi avanzati per calcolare la posizione, la velocità e l'orientamento di un veicolo nel tempo. Incorpora algoritmi di navigazione come il filtro di Kalman per la fusione e l'integrazione dei sensori. Un INS dati di navigazione in tempo reale, tra cui posizione, velocità e orientamento, senza fare affidamento su sistemi di posizionamento esterni come GNSS.
Questo sistema di navigazione viene tipicamente utilizzato in applicazioni che richiedono soluzioni di navigazione complete, in particolare in ambienti GNSS, come UAV militari, navi e sottomarini.
Come posso combinare sistemi inerziali con un LIDAR per la mappatura con droni?
La combinazione dei sistemi inerziali di SBG Systems con LiDAR per la mappatura con droni migliora l'accuratezza e l'affidabilità nell'acquisizione di dati geospaziali precisi.
Ecco come funziona l'integrazione e come apporta vantaggi alla mappatura basata su drone:
- Un metodo di telerilevamento che utilizza impulsi laser per misurare le distanze dalla superficie terrestre, creando una mappa 3D dettagliata del terreno o delle strutture.
- L'INS di SBG Systems combina una Inertial Measurement Unit (IMU) con dati GNSS per fornire posizionamento, orientamento (beccheggio, rollio, imbardata) e velocità precisi, anche in ambienti privi di GNSS.
Il sistema inerziale di SBG è sincronizzato con i dati LiDAR. L'INS traccia con precisione la posizione e l'orientamento del drone, mentre il LiDAR cattura i dettagli del terreno o degli oggetti sottostanti.
Conoscendo l'orientamento preciso del drone, i dati LiDAR possono essere posizionati accuratamente nello spazio 3D.
Il componente GNSS fornisce il posizionamento globale, mentre l'IMU offre dati di orientamento e movimento in tempo reale. Questa combinazione garantisce che, anche quando il segnale GNSS è debole o non disponibile (ad esempio, vicino a edifici alti o foreste dense), l'INS possa continuare a tracciare la traiettoria e la posizione del drone, consentendo una mappatura LiDAR coerente.
Cosa significa localizzazione e mappatura simultanea?
Localizzazione e Mappatura Simultanea (SLAM) è una tecnica computazionale che consente a un robot, veicolo o dispositivo di costruire una mappa di un ambiente sconosciuto determinando contemporaneamente la propria posizione all'interno di tale mappa.
Combina dati provenienti da vari sensori (ad es. telecamere, LiDAR, radar, IMU, GNSS) con algoritmi come il filtraggio o l'ottimizzazione per ottenere mappatura e navigazione in tempo reale.
Lo SLAM consente ai sistemi autonomi di navigare e comprendere l'ambiente circostante senza mappe preesistenti o GPS.
