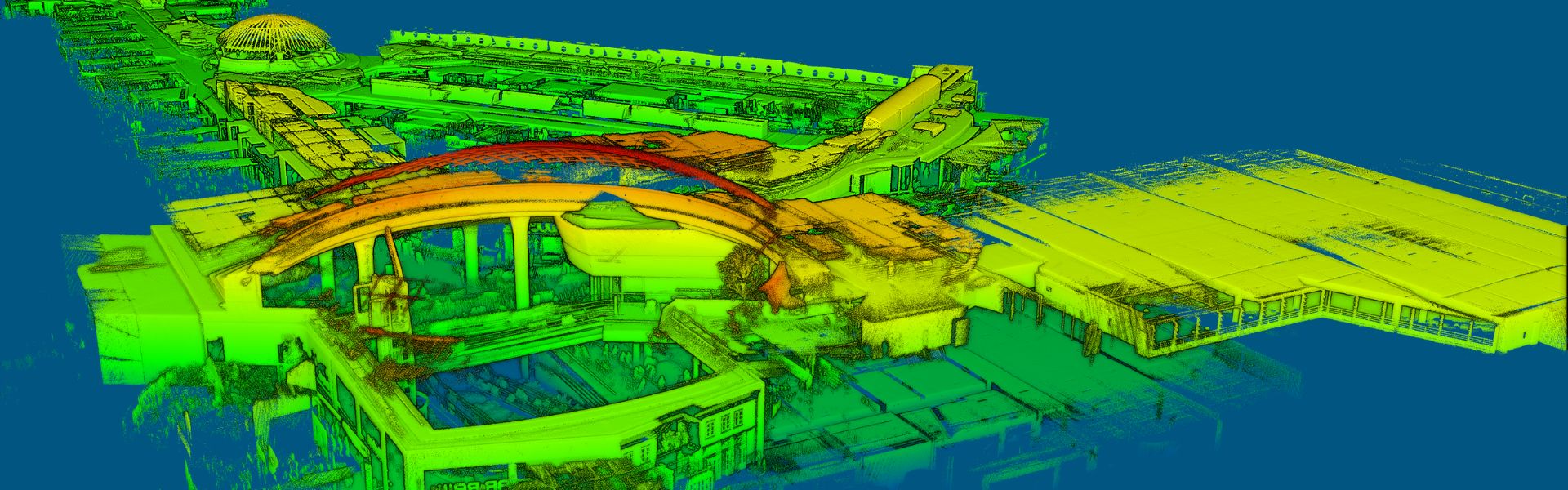
Cartographie d'intérieur avec sac à dos
L'Ellipse-D INS RTK facilite le calcul SLAM et synchronise le LiDAR et la caméra.
“Cela fait maintenant des années que nous travaillons avec SBG Systems et la série Ellipse en particulier. Nous avons toujours fait confiance à ces capteurs inertiels robustes.” | Jérôme N., Fondateur de VIAMETRIS
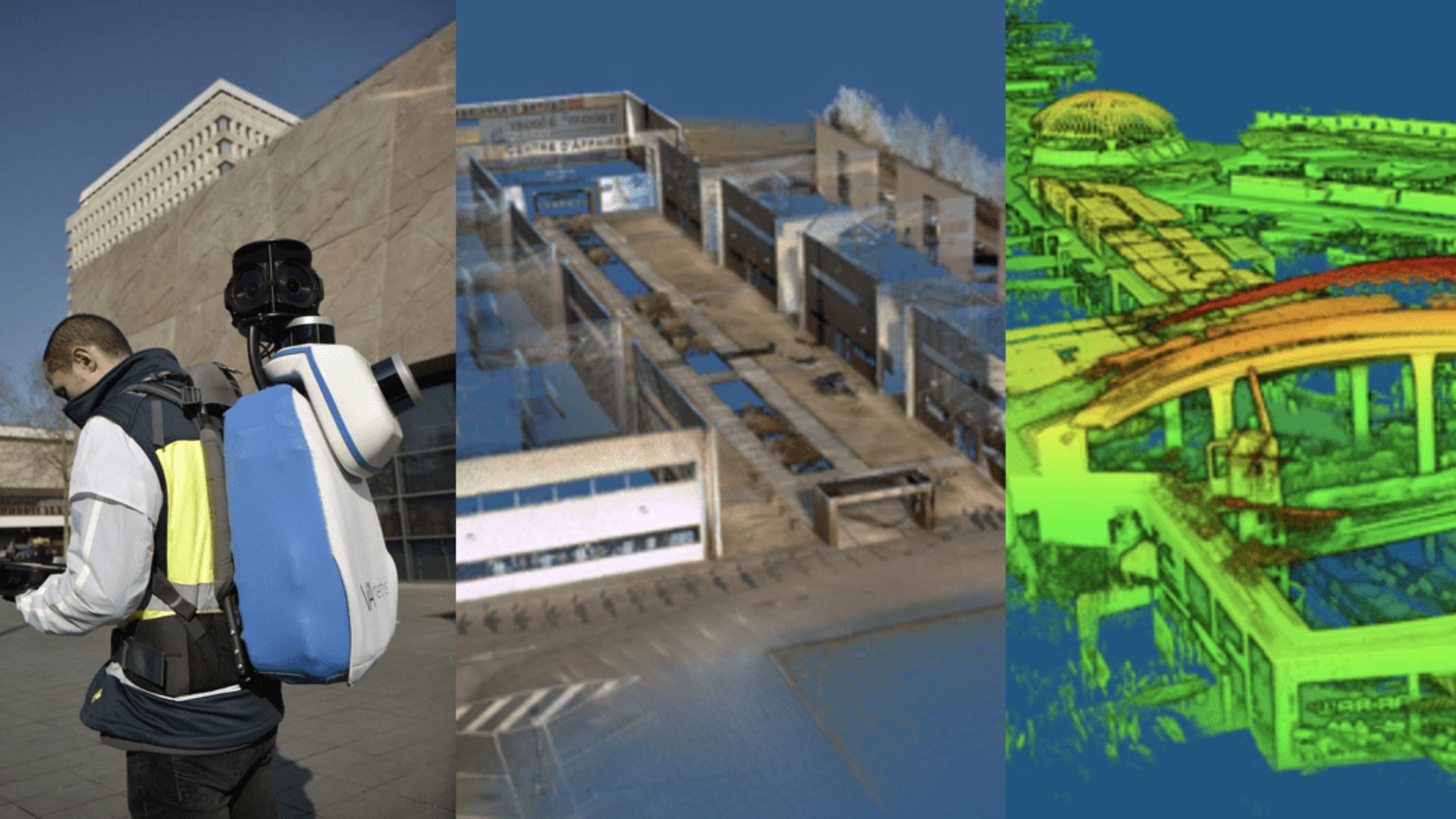
Système mobile de numérisation portable
Le bMS3D-360 a été conçu pour les environnements les plus difficiles. Il intègre deux capteurs Velodyne LiDAR, une caméra 360 Lady-bug, l'Ellipse-D, le système de navigation inertielle SBG avec récepteur GNSS L1/L2 interne, et un ordinateur.
Un flux de travail accéléré de 7 fois
Le flux de travail est simple. Le géomètre démarre le système, vérifie sur une tablette que les informations GNSS et inertielles sont calculées, et commence le levé.
De retour au bureau, l'utilisateur lance le logiciel de post-traitement INS/GNSS pour augmenter la précision de l'orientation et de la position, puis utilise le logiciel VIAMETRIS pour géoréférencer et coloriser le nuage de points.
Les données collectées sont prêtes à être importées dans les logiciels de conception les plus courants. Ce flux de travail est 7 fois plus rapide qu'une méthode traditionnelle.
Il n'y a pas de données manquantes ; le nuage de points peut être utilisé pour d'autres mesures, ce qui signifie une économie de temps et de frais de déplacement.
Outre les performances éprouvées du bMS3D-360, certains détails font la différence sur le marché, comme la caméra 360 située sur un mât rétractable pour un champ de vision plus large lorsqu'elle est déployée, et une sécurité accrue lorsqu'elle est rétractée (certains toits peuvent être très bas, dans les parkings par exemple).
C'est le seul sac à dos à offrir une telle caméra, ce qui simplifie grandement le travail de traitement. Lors de la navigation dans le nuage de points, l'utilisateur ouvre une image unique de l'environnement scanné à 360° au lieu de regarder 4 points de vue de caméra différents.
Lorsque le GNSS est confronté à des sources de perturbation, l'INS maintient la trajectoire là où la technologie SLAM est limitée.
L'INS RTK pour faciliter le calcul SLAM
L'Ellipse-D est un système de navigation inertielle très compact intégrant un récepteur GNSS L1/L2. Cet INS de qualité industrielle calcule le roulis, le tangage, le cap ainsi que la position grâce au Filtrage de Kalman Étendu embarqué.
En temps réel, les données d'orientation de l'Ellipse-D sont utilisées pour corriger l'attitude de l'équipement et assistent le cap calculé par le SLAM.
En effet, si le cap basé sur le SLAM est fourni à 20 Hz, le cap basé sur l'inertiel est délivré à 200 Hz. Entre deux informations SLAM, l'INS maintient un cap robuste.
Le récepteur GNSS fournit un positionnement absolu au nuage de points et ajoute une contrainte d'altitude. De plus, lorsque des perturbations affectent le GNSS, l'INS maintient la trajectoire là où la technologie SLAM échoue. Par exemple, dans les parkings sans objets proches pour la mesure LiDAR, l'INS assure une navigation précise.
Jérôme Ninot, Fondateur de VIAMETRIS, explique ce choix : “Cela fait des années que nous travaillons avec SBG Systems et la série Ellipse en particulier. Nous avons toujours fait confiance à ces capteurs inertiels robustes, alors quand il a fallu choisir un système INS/GNSS pour notre sac à dos, nous étions ravis que l'Ellipse-D intègre déjà un récepteur GNSS.”
C'est toujours un gain de temps de ne pas avoir à intégrer un équipement supplémentaire, insiste Jérôme.

Ellipse-D
L'Ellipse-D est un système de navigation inertielle intégrant un GNSS RTK bi-fréquence à double antenne compatible avec notre logiciel de post-traitement Qinertia.
Conçu pour les applications robotiques et géospatiales, il peut fusionner l'entrée odomètre avec Pulse ou CAN OBDII pour une précision accrue de la navigation à l'estime.

Demander un devis pour l'Ellipse-D
Vous avez des questions ?
Bienvenue dans notre section FAQ ! Vous trouverez ici les réponses aux questions les plus fréquemment posées sur les applications que nous présentons. Si vous ne trouvez pas ce que vous cherchez, n'hésitez pas à nous contacter directement !
Quelle est la différence entre GNSS et GPS ?
Le GNSS signifie Système Mondial de Navigation par Satellite et le GPS signifie Système de Positionnement Global. Ces termes sont souvent employés indifféremment, mais ils désignent des concepts distincts au sein des systèmes de navigation par satellite.
Le GNSS est un terme générique désignant l'ensemble des systèmes de navigation par satellite, tandis que le GPS fait spécifiquement référence au système américain. Il inclut plusieurs systèmes qui offrent une couverture mondiale plus complète, alors que le GPS n'est qu'un de ces systèmes.
Vous bénéficiez d'une précision et d'une fiabilité accrues avec GNSS, en intégrant les données de plusieurs systèmes, alors que GPS seul peut avoir des limitations en fonction de la disponibilité des satellites et des conditions environnementales.
Quelle est la différence entre AHRS et INS ?
La principale différence entre un Attitude and Heading Reference System (AHRS) et un Inertial Navigation System (INS) réside dans leur fonctionnalité et l'étendue des données qu'ils fournissent.
Un AHRS fournit des informations d'orientation, en particulier l'attitude (tangage, roulis) et le cap (lacet) d'un véhicule ou d'un appareil. Il utilise généralement une combinaison de capteurs, notamment des gyroscopes, des accéléromètres et des magnétomètres, pour calculer et stabiliser l'orientation. L'AHRS fournit la position angulaire sur trois axes (tangage, roulis et lacet), ce qui permet à un système de comprendre son orientation dans l'espace. Il est souvent utilisé dans l'aviation, les UAV, la robotique et les systèmes marins pour fournir des données d'attitude et de cap précises, ce qui est essentiel pour le contrôle et la stabilisation du véhicule.
Un INS fournit non seulement des données d'orientation (comme un AHRS), mais suit également la position, la vitesse et l'accélération d'un véhicule dans le temps. Il utilise des capteurs inertiels pour estimer le mouvement dans l'espace 3D sans dépendre de références externes comme le GNSS. Il combine les capteurs présents dans les AHRS (gyroscopes, accéléromètres) mais peut également inclure des algorithmes plus avancés pour le suivi de la position et de la vitesse, souvent en s'intégrant à des données externes comme le GNSS pour une précision accrue.
En résumé, l'AHRS se concentre sur l'orientation (attitude et cap), tandis que l'INS fournit une suite complète de données de navigation, y compris la position, la vitesse et l'orientation.
Quelle est la différence entre une IMU et un INS ?
La différence entre une unité de mesure inertielle (IMU) et un système de navigation inertielle (INS) réside dans leur fonctionnalité et leur complexité.
Une IMU unité de mesure inertielle) fournit des données brutes sur l’accélération linéaire et la vitesse angulaire du véhicule, mesurées par des accéléromètres et des gyroscopes. Elle fournit des informations sur le roulis, le tangage, le lacet et le mouvement, mais ne calcule pas les données de position ou de navigation. IMU spécifiquement conçue pour transmettre des données essentielles sur le mouvement et l’orientation en vue d’un traitement externe permettant de déterminer la position ou la vitesse.
D’autre part, un INS système de navigation inertielle) combine IMU avec des algorithmes avancés pour calculer la position, la vitesse et l'orientation d'un véhicule au fil du temps. Il intègre des algorithmes de navigation tels que le filtrage de Kalman pour la fusion et l'intégration des capteurs. Un INS des données de navigation en temps réel, notamment la position, la vitesse et l'orientation, sans dépendre de systèmes de positionnement externes tels que GNSS.
Ce système de navigation est généralement utilisé dans des applications nécessitant des solutions de navigation complètes, en particulier dans des environnements GNSS, comme les drones militaires, les navires et les sous-marins.
Comment puis-je combiner des systèmes inertiels avec un LIDAR pour la cartographie par drone ?
La combinaison des systèmes inertiels SBG Systems avec le LiDAR pour la cartographie par drone améliore la précision et la fiabilité de la capture de données géospatiales précises.
Voici comment fonctionne l'intégration et quels sont ses avantages pour la cartographie par drone :
- Une méthode de télédétection qui utilise des impulsions laser pour mesurer les distances jusqu'à la surface de la Terre, créant ainsi une carte 3D détaillée du terrain ou des structures.
- L'INS SBG Systems combine une centrale de mesure inertielle (IMU) avec des données GNSS pour fournir un positionnement, une orientation (tangage, roulis, lacet) et une vitesse précis, même dans les environnements où le GNSS est inaccessible.
Le système inertiel de SBG est synchronisé avec les données LiDAR. L'INS suit avec précision la position et l'orientation du drone, tandis que le LiDAR capture les détails du terrain ou de l'objet en dessous.
En connaissant l'orientation précise du drone, les données LiDAR peuvent être positionnées avec précision dans l'espace 3D.
Le composant GNSS fournit un positionnement global, tandis que l'IMU offre des données d'orientation et de mouvement en temps réel. Cette combinaison garantit que même lorsque le signal GNSS est faible ou indisponible (par exemple, à proximité de bâtiments élevés ou de forêts denses), l'INS peut continuer à suivre la trajectoire et la position du drone, ce qui permet une cartographie LiDAR cohérente.
Que signifie localisation et cartographie simultanées ?
Simultaneous Localization and Mapping (SLAM) est une technique de calcul qui permet à un robot, un véhicule ou un appareil de construire une carte d'un environnement inconnu tout en déterminant simultanément sa propre position au sein de cette carte.
Elle combine les données de divers capteurs (par exemple, caméras, LiDAR, radar, IMU, GNSS) avec des algorithmes tels que le filtrage ou l'optimisation pour réaliser une cartographie et une navigation en temps réel.
Le SLAM permet aux systèmes autonomes de naviguer et de comprendre leur environnement sans cartes préalables ni GPS.
