Ellipse compatível com Cobham satcom
A compatibilidade entre o Ellipse-D e o Aviator UAV 200 é declarada pelo CNES para o apontamento de antenas. “O INS Ellipse-D da SBG possui um design compacto notável que permitirá aos industriais de UAV melhorar e desenvolver os serviços que oferecem; este é o know-how francês na vanguarda da inovação.” – Equipe do centro Cesars do CNES

O CNES, também chamado de Centro Nacional de Estudos Espaciais, é uma agência francesa dedicada a estudos espaciais. Eles operam sob a supervisão dos Ministérios da Economia, Defesa e Pesquisa.
O Centro CESARS do CNES Facilita o Acesso à Comunicação via Satélite
Uma das missões é desenvolver, apresentar e executar o Programa Espacial Francês para o governo nacional. O CNES se concentra em 5 áreas estratégicas: Ariane (Lançadores), Ciências, Observação, Telecomunicações e Defesa.
O CNES criou o centro CESARS para divulgar e aumentar o uso de Satcom em qualquer novo tipo de aplicação.
O CESARS acolhe livremente empresas, laboratórios, coletividades, para lhes dar conselhos, feedback sobre tecnologias, auxiliá-los na realização de testes e dar acesso à própria plataforma técnica, incluindo o hardware.
Uma solução combinada para controle aprimorado em tempo real para navegação de VANTs (Veículos Aéreos Não Tripulados)
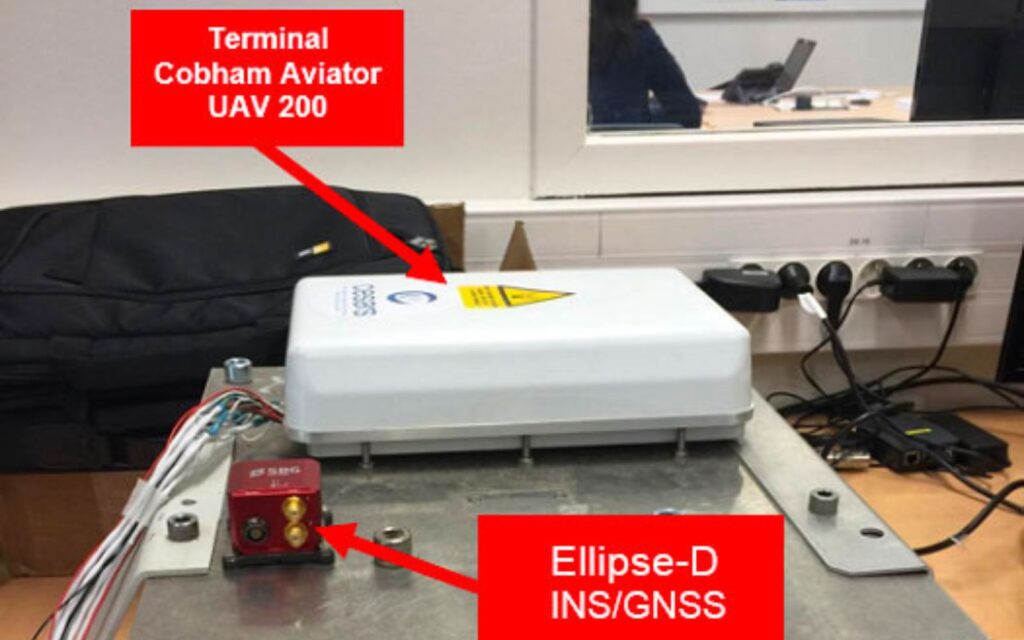
A equipe CESARS geralmente testa e verifica equipamentos em solo antes de prosseguir com um projeto. Aqui, o objetivo era confirmar a compatibilidade entre o AVIATOR UAV 200 da Cobham e o Sistema de Navegação Inercial Ellipse-D da SBG Systems.
O Ellipse-D é um Sistema de Navegação Inercial miniatura de dupla antena que fornece dados de navegação e orientação altamente precisos mesmo nos ambientes mais desafiadores.
Como todos os sensores da SBG, o Ellipse-D INS/GNSS passa por testes extensivos de -40°C a 85°C para garantir um desempenho ideal. Além disso, é cuidadosamente calibrado para assegurar confiabilidade em todas as condições.
O AVIATOR UAV 200 é um terminal Satcom compacto e completo (antena e modem) que se encaixa em um pequeno UAV. Ele permite a conexão entre um UAV e um satélite, que atua como intermediário entre o UAV e o controle em solo.
A solução da Cobham transmite informações, como vídeos, do UAV para o controle em solo a uma taxa de dados muito baixa (200kbps). O AVIATOR UAV 200 permite que o UAV voe por mais tempo e mais longe da sala de controle via comunicação BLOS (Beyond Line of Sight).
Como eles trabalham juntos?
O sensor inercial envia entradas de roll, pitch, yaw, heading e posição para o AVIATOR UAV 200. Usamos esses dados para direcionar o feixe da antena do AVIATOR UAV 200 em direção a um satélite de telecomunicações e rastreá-lo com precisão.
Posteriormente, isso contribui para manter uma transmissão de dados ideal. Quanto mais preciso for o apontamento da antena, mais estável será o link de satélite.
O Ellipse-D INS/GNSS fornece heading preciso e confiável no momento da inicialização, graças ao seu receptor GNSS de antena dupla, fundamental para essas aplicações. O sensor INS fornece dados de movimento e posição para ajudar o AVIATOR UAV 200 a manter o link de satélite durante o voo.
Em caso de spoofing, o INS ajudará a manter um heading robusto graças ao Extended Kalman Filter.
Testes estacionários e em movimento na configuração de solo
Em outubro de 2020, o CNES realizou alguns testes no CST (Centro Espacial de Toulouse).
Primeiramente, a equipe preparou o hardware e o software no laboratório. Além disso, eles integraram o hardware no caminhão Oscar. Oscar, um laboratório móvel, transporta e testa antenas OTM diretamente nas estradas. Após confirmar a operação estacionária adequada, a equipe realizou testes OTM dentro do CNES.
Finalmente, esses testes confirmaram a compatibilidade entre o sensor inercial e o terminal.
Configuração do equipamento
Durante o teste em modo estacionário no laboratório, o CNES utilizou o software sbgcenter que acompanha o Ellipse-D INS/GNSS para configurar o equipamento de forma a adequar-se melhor à sua aplicação.
Este software fornece diferentes perfis de movimento para ajustar o parâmetro do Filtro de Kalman Estendido e fornecer o melhor desempenho para as condições de uso.
Configurações escolhidas no software sbgCenter:
- Escolha do perfil: “propósito geral”. Foi o mais adequado para o comportamento do caminhão Oscar. Para uma integração em um VANT, um perfil de VANT deve ser escolhido.
- Configuração das 2 antenas GNSS: devem estar a mais de 45 cm do terminal Cobham, e em um “ambiente” similar (próximas o suficiente, sem obstáculos entre elas, e sujeitas à mesma dinâmica).
- Alinhamento do veículo em relação à unidade de controle inserida (em nosso caso, eles estão orientados ao longo do mesmo eixo).
- Se outros sensores forem colocados no veículo, eles também podem ser inseridos (tubo de pitot, acelerômetro...).
- A porta COM A do Ellipse-D INS/GNSS (o “principal”) está conectada ao PC para visualizar as informações recebidas no sbgcenter. A porta E está conectada ao terminal Cobham. Ambas estão configuradas a 115200 bauds.
- No que diz respeito à saída de dados, a frequência de transmissão das mensagens AT_ITINS deve ser de no máximo 50 Hz.

Integração e Teste OTM
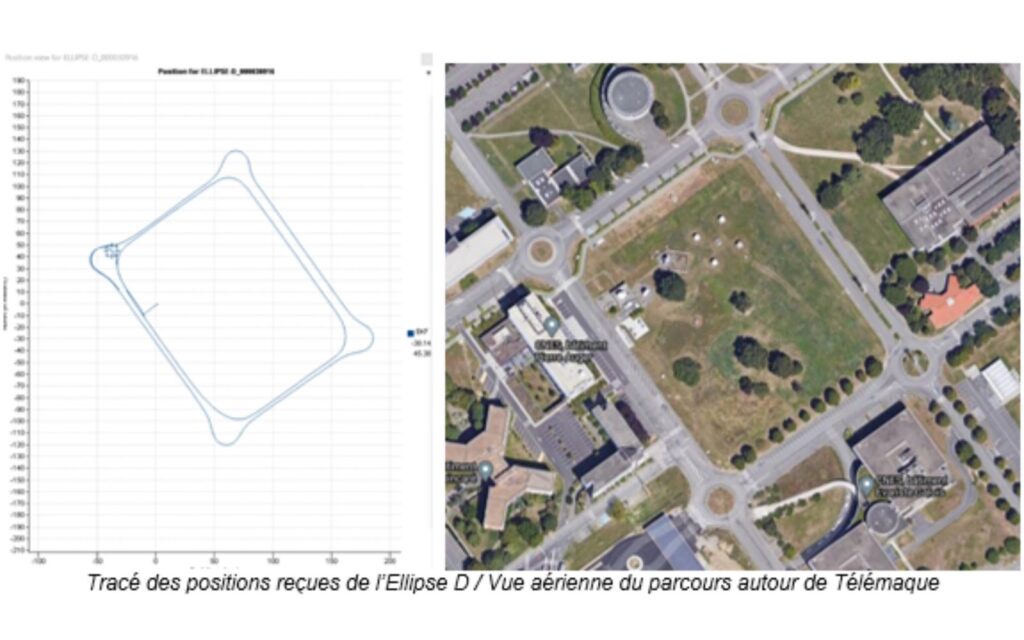
Dois testes “On-The-Move” foram conduzidos no mesmo circuito. O circuito de teste inclui linhas retas e rotatórias e a velocidade máxima para completá-lo foi de 30km/H
O primeiro teste revelou que ajustes de configurações eram necessários, especialmente a frequência de transmissão que estava definida muito alta. Durante o segundo teste, a conexão estava estável, mesmo ao mudar de direção, validando as configurações.
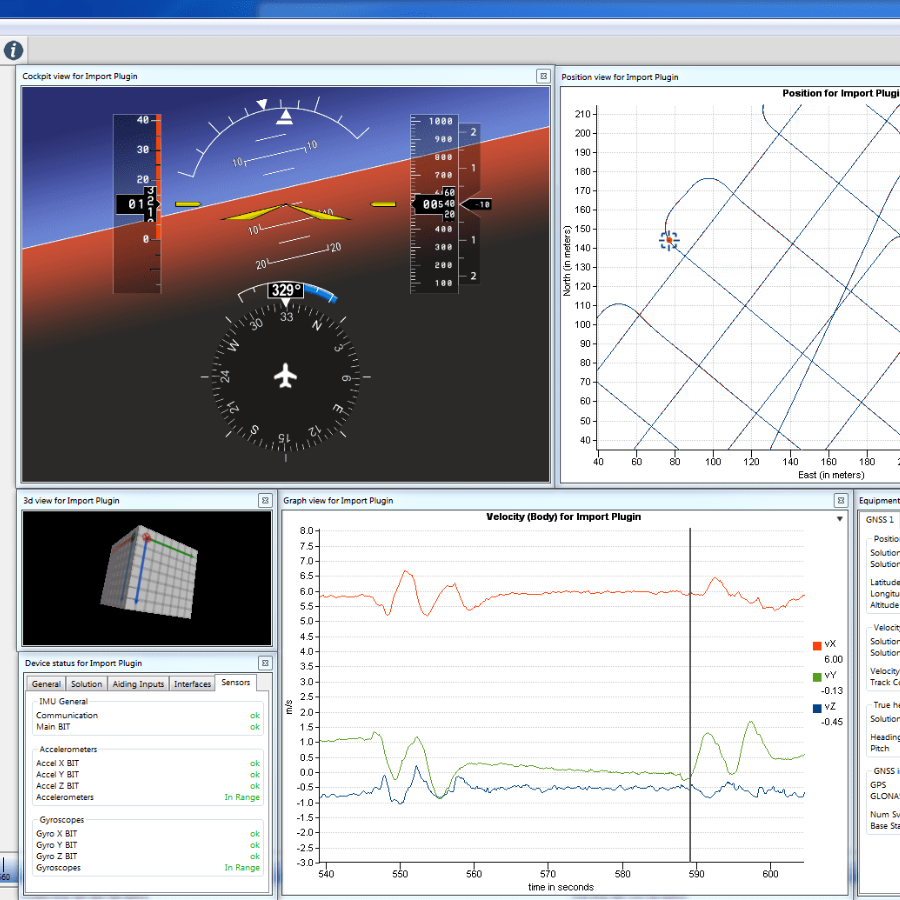
O ping passou corretamente, e as latências mais longas observadas são aquelas que seguem uma passagem perto de um edifício (possível mascaramento do LOS). Na interface do Aviator UAV 200, tudo funcionou (nível de sinal >50dbHz, GPS fix). Ao gravar as sessões de teste, as sequências podem ser reproduzidas no SBGcenter através de diferentes opções:
- Visualização da posição: Mostra uma figura com animações onde você pode acompanhar o caminho do veículo.
- Visão do Cockpit: Uma interface gráfica do usuário com visualização dos dados de atitude da portadora.

Conclusão
Após todos esses testes, a equipe do centro Cesars do CNES chegou à conclusão de que o Sistema de Navegação Inercial Ellipse-D da SBG Systems é compatível com o terminal Cobham Aviator UAV 200, em uma configuração de “solo”.
Este teste conclusivo oferece um vasto leque de oportunidades para usuários de UAVs.
Ellipse-D
O Ellipse-D é um sistema de navegação inercial que integra uma antena dupla e um GNSS RTK de dupla frequência que é compatível com o nosso software de pós-processamento Qinertia.
Projetado para aplicações robóticas e geoespaciais, ele pode fundir a entrada do odômetro com Pulse ou CAN OBDII para maior precisão de dead-reckoning.

Solicite uma cotação para o Ellipse-D
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
Os UAVs usam GPS?
Veículos aéreos não tripulados (UAVs), comumente conhecidos como drones, normalmente usam a tecnologia do Sistema de Posicionamento Global (GPS) para navegação e posicionamento.
O GPS é um componente essencial do sistema de navegação de um UAV, fornecendo dados de localização em tempo real que permitem ao drone determinar sua posição com precisão e executar diversas tarefas.
Nos últimos anos, este termo foi substituído por um novo, GNSS (Global Navigation Satellite System). GNSS refere-se à categoria geral de sistemas de navegação por satélite, que engloba GPS e vários outros sistemas. Em contraste, o GPS é um tipo específico de GNSS desenvolvido pelos Estados Unidos.
Como controlar os atrasos de saída em operações com UAVs?
Controlar os atrasos de saída nas operações de VANTs é essencial para garantir um desempenho responsivo, navegação precisa e comunicação eficaz, especialmente em aplicações de defesa ou de missão crítica.
A latência de saída é um aspecto importante em aplicações de controle em tempo real, onde uma latência de saída mais alta pode degradar o desempenho dos loops de controle. Nosso software embarcado INS foi projetado para minimizar a latência de saída: uma vez que os dados do sensor são amostrados, o Extended Kalman Filter (EKF) executa cálculos pequenos e de tempo constante antes que as saídas sejam geradas. Normalmente, o atraso de saída observado é inferior a um milissegundo.
A latência de processamento deve ser adicionada à latência de transmissão de dados se você quiser obter o atraso total. Essa latência de transmissão varia de uma interface para outra. Por exemplo, uma mensagem de 50 bytes enviada em uma interface UART a 115200 bps levará 4ms para a transmissão completa. Considere taxas de transmissão mais altas para minimizar a latência de saída.
O que é geofencing de UAV?
O geofencing de VANT é uma barreira virtual que define limites geográficos específicos dentro dos quais um veículo aéreo não tripulado (VANT) pode operar.
Esta tecnologia desempenha um papel crítico no aprimoramento da segurança e da conformidade das operações com drones, principalmente em áreas onde as atividades de voo podem representar riscos para pessoas, propriedades ou espaço aéreo restrito.
Em setores como serviços de entrega, construção e agricultura, o geofencing ajuda a garantir que os drones operem dentro de áreas seguras e legais, evitando potenciais conflitos e aumentando a eficiência operacional.
As autoridades policiais e os serviços de emergência podem usar o geofencing para gerenciar as operações de UAV durante eventos públicos ou emergências, garantindo que os drones não entrem em áreas sensíveis.
O geofencing pode ser empregado para proteger a vida selvagem e os recursos naturais, restringindo o acesso de drones a certos habitats ou áreas de conservação.
O que é uma carga útil?
Uma carga útil refere-se a qualquer equipamento, dispositivo ou material que um veículo (drone, embarcação...) transporta para desempenhar sua finalidade pretendida além das funções básicas. A carga útil é separada dos componentes necessários para a operação do veículo, como seus motores, bateria e estrutura.
Exemplos de Cargas Úteis:
- Câmeras: câmeras de alta resolução, câmeras termográficas...
- Sensores: LiDAR, sensores hiperespectrais, sensores químicos…
- Equipamentos de comunicação: rádios, repetidores de sinal…
- Instrumentos científicos: sensores meteorológicos, coletores de ar…
- Outros equipamentos especializados
