Ellipse-D alimentando um caminhão autônomo
Caminhão autônomo com tração e sistema de direção independentes nas rodas.
"O Ellipse-D da SBG Systems foi fácil de usar, muito preciso e estável, com um formato pequeno — tudo isso foi essencial para o desenvolvimento do nosso WATonoTruck." | Amir K., Professor e Diretor, Universidade de Waterloo

Todos sabemos que os acidentes nas estradas ocorrem devido a erros do motorista, condições climáticas adversas ou mau funcionamento do veículo. Mas e se pudéssemos fazer os veículos dirigirem sozinhos, evitando esses acidentes? Por exemplo, um caminhão autônomo ou um carro autônomo.
Essa é a ideia por trás dos veículos autônomos, e o Laboratório de Sistemas de Veículos Mecatrônicos (MVS) da Universidade de Waterloo está trabalhando em um projeto chamado WATonoTruck (WATerloo atonomous Truck).
É um caminhão de plataforma autônomo projetado para manuseio de materiais pesados, agricultura e aplicações de serviço. Ele usa métodos de controle avançados para analisar os movimentos do caminhão, especialmente em condições perigosas ou cenários de mau funcionamento, garantindo segurança e eficiência.
O laboratório tem como objetivo estender a aplicação da tecnologia de veículos autônomos além do transporte de passageiros. Eles querem usá-la em outros setores, como agricultura, mineração e transporte marítimo, aumentando assim a eficiência e reduzindo o tempo de inatividade operacional.
Conheça o WATonoTruck
Um caminhão que não precisa de motorista – este é o WATonoTruck! É um caminhão de plataforma autônomo com sistema independente de direção e tração nas rodas. Ele é construído na plataforma do módulo de canto (CM).
Os CMs foram desenvolvidos com o design de veículo modular em mente e podem ser instalados em qualquer chassi em qualquer configuração.
Cada CM funciona como um veículo elétrico de uma única roda equipado com sua própria unidade de controle. Ele permite operar independentemente com sistemas de direção, freio, direção e suspensão.
Isso torna o caminhão super inteligente e adaptável a qualquer aplicação e terreno.
WATonoTruck impulsionado por Ellipse-D
Como líderes em soluções de posicionamento e navegação de alta precisão, temos orgulho de colaborar com o Laboratório de Sistemas de Veículos Mecatrônicos da Universidade de Waterloo.
Fornecemos o Ellipse-D, um INS RTK de antena dupla, que oferece precisão incomparável em posição e direção.
Este nível de precisão é crucial para a navegação autônoma, garantindo a movimentação segura e precisa do WATonoTruck, mesmo em ambientes desafiadores.

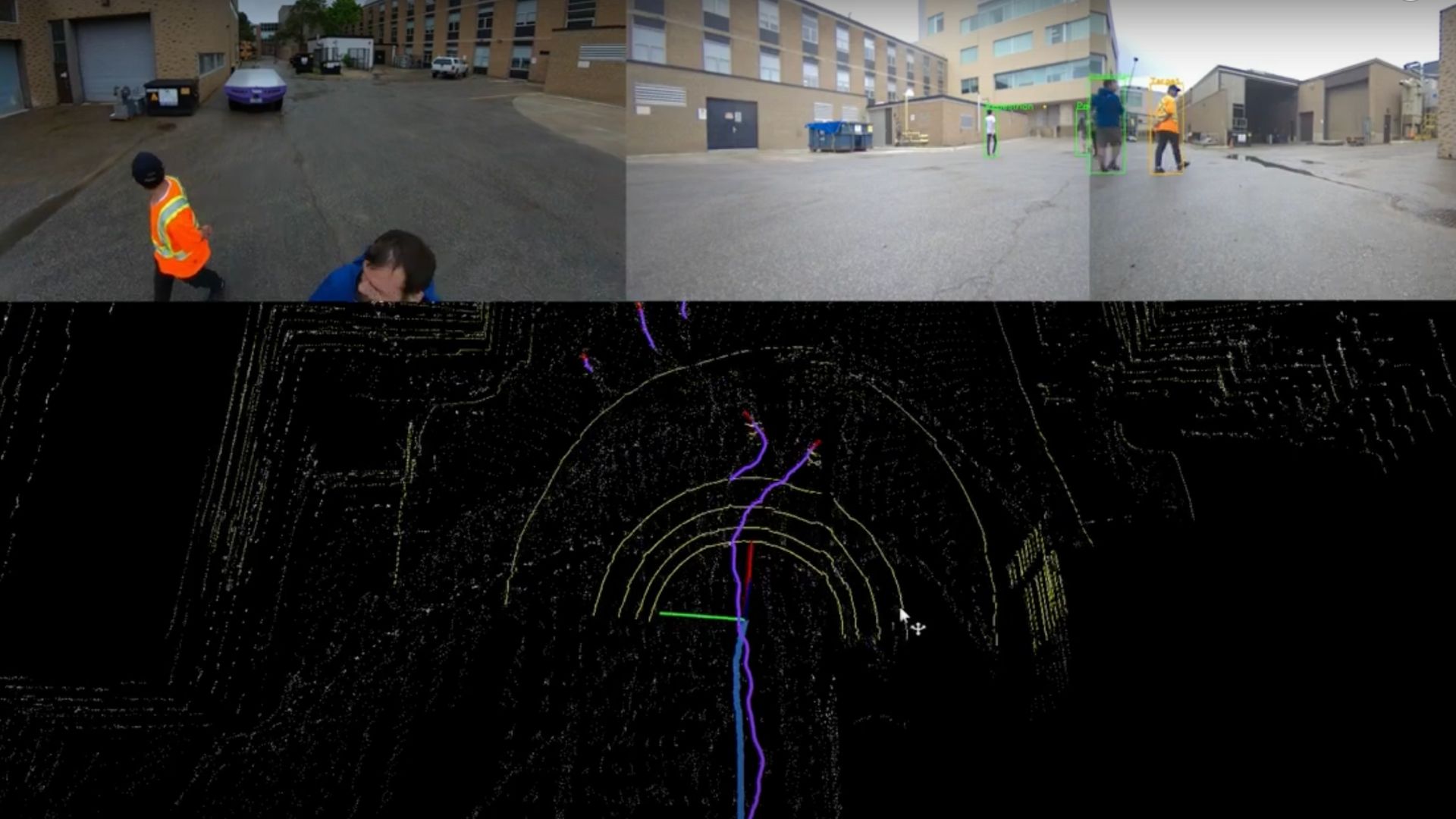
Ellipse-D (3ª geração), sensores LiDAR e câmeras avançadas – esta suíte de sensores completa possibilita o mapeamento do ambiente em tempo real, a detecção de obstáculos e o planejamento de trajetória.
Por meio do nosso patrocínio, o desenvolvimento do WATonoTruck pelo laboratório recebe apoio fundamental em termos de alta precisão, garantindo soluções de Movimento e Navegação confiáveis.
Esta iniciativa colaborativa não só contribui para o desenvolvimento bem-sucedido do WATonoTruck, mas também promove o crescimento de aplicações de veículos autônomos em diversas indústrias, impulsionando a inovação e a segurança no transporte e além.

Ellipse-D
O Ellipse-D é um sistema de navegação inercial que integra uma antena dupla e um GNSS RTK de dupla frequência que é compatível com o nosso software de pós-processamento Qinertia.
Projetado para aplicações robóticas e geoespaciais, ele pode fundir a entrada do odômetro com Pulse ou CAN OBDII para maior precisão de dead-reckoning.

Solicite uma cotação para o Ellipse-D
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
Qual é a diferença entre RTK e PPK?
A Cinemática em Tempo Real (RTK) é uma técnica de posicionamento onde as correções GNSS são transmitidas quase em tempo real, normalmente usando um fluxo de correção de formato RTCM. No entanto, pode haver desafios para garantir as correções GNSS, especificamente sua integridade, disponibilidade, cobertura e compatibilidade.
A maior vantagem do PPK sobre o pós-processamento RTK é que as atividades de processamento de dados podem ser otimizadas durante o pós-processamento, incluindo o processamento para frente e para trás, enquanto no processamento em tempo real, qualquer interrupção ou incompatibilidade nas correções e sua transmissão levará a um posicionamento de menor precisão.
Uma primeira vantagem fundamental do pós-processamento GNSS (PPK) vs. tempo real (RTK) é que o sistema usado em campo não precisa ter um datalink/rádio para alimentar as correções RTCM provenientes do CORS no sistema INS/GNSS.
A principal limitação para a adoção do pós-processamento é a exigência de que a aplicação final atue sobre o ambiente. Por outro lado, se sua aplicação puder suportar o tempo de processamento adicional necessário para produzir uma trajetória otimizada, isso melhorará muito a qualidade dos dados para todas as suas entregas.
O que é Posicionamento Pontual Preciso?
O Posicionamento Pontual Preciso (PPP) é uma técnica de navegação por satélite que oferece posicionamento de alta precisão, corrigindo erros de sinal de satélite. Ao contrário dos métodos GNSS tradicionais, que geralmente dependem de estações de referência terrestres (como no RTK), o PPP utiliza dados globais de satélite e algoritmos avançados para fornecer informações de localização precisas.
O PPP funciona em qualquer lugar do mundo sem a necessidade de estações de referência locais. Isso o torna adequado para aplicações em ambientes remotos ou desafiadores, onde a infraestrutura terrestre é inexistente. Ao utilizar dados precisos de órbita e clock de satélite, juntamente com correções para efeitos atmosféricos e de multicaminhos, o PPP minimiza erros comuns de GNSS e pode alcançar precisão em nível de centímetro.
Embora o PPP possa ser utilizado para posicionamento pós-processado, que envolve a análise de dados coletados posteriormente, ele também pode fornecer soluções de posicionamento em tempo real. O PPP em tempo real (RTPPP) está cada vez mais disponível, permitindo que os usuários recebam correções e determinem sua posição em tempo real.
