Cemitérios militares americanos digitalizados para uma missão solene
“Escolhemos o Ellipse-D por causa de sua solução GNSS e Inercial completa, embalada em um dispositivo compacto e de baixo consumo de energia.” | Matthew R. Staley, Engenheiro Militar e Cientista de Suporte de Pesquisa no Centro Geoespacial do Exército dos EUA
O Army Geospatial Center (AGC) aplicou inovação para ajudar os visitantes de cemitérios militares americanos a encontrar seus entes queridos.
Os métodos tradicionais de levantamento GPS e a digitalização de mapeamento 3D foram integrados e montados em uma mochila especialmente construída para a porção de coleta deste projeto.
Uma interface web que atua como front-end para os dados coletados fornece uma interface direta para os visitantes encontrarem seus parentes e acessarem informações ampliadas armazenadas no banco de dados GIS.
Um Projeto Piloto para uma Missão Solene
Encontrar uma lápide específica em um Cemitério Nacional Americano geralmente requer extensas e demoradas revisões de registros por parte dos administradores.
Para ajudar os visitantes a encontrar facilmente seus entes queridos, o Army Geospatial Center (AGC) em colaboração com o Arlington National Cemetery (ANC) concluiu um projeto piloto incluindo os Cemitérios de Corozal (Panamá) e Normandia (França) que, quando combinados, consistem em mais de 15.000 sepulturas.
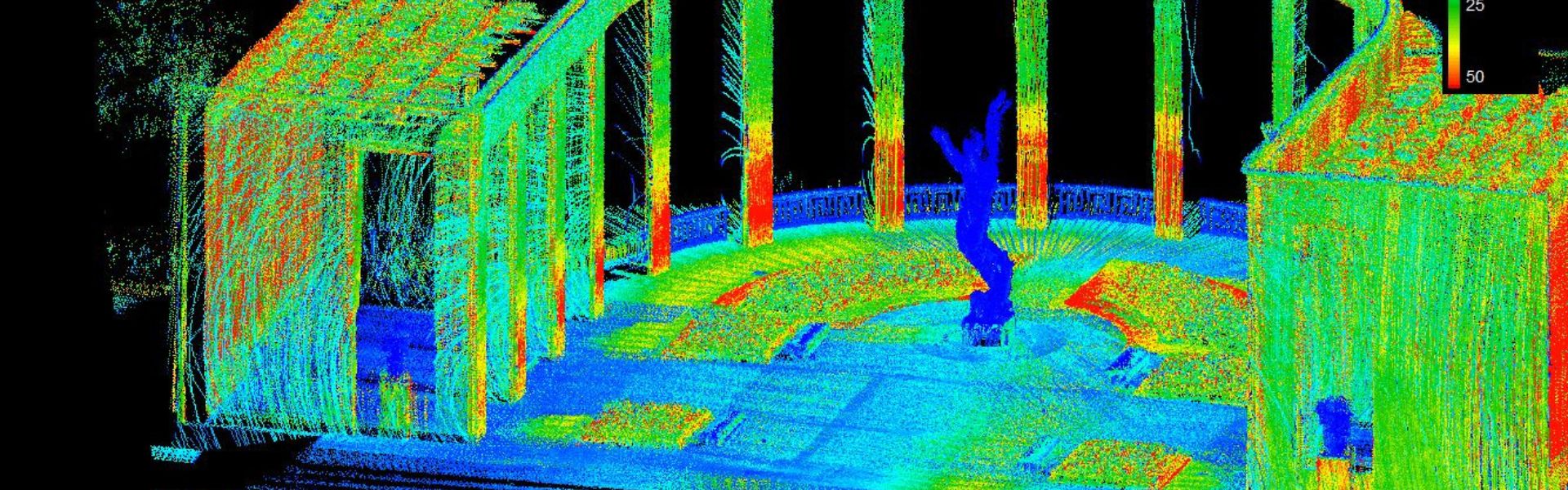
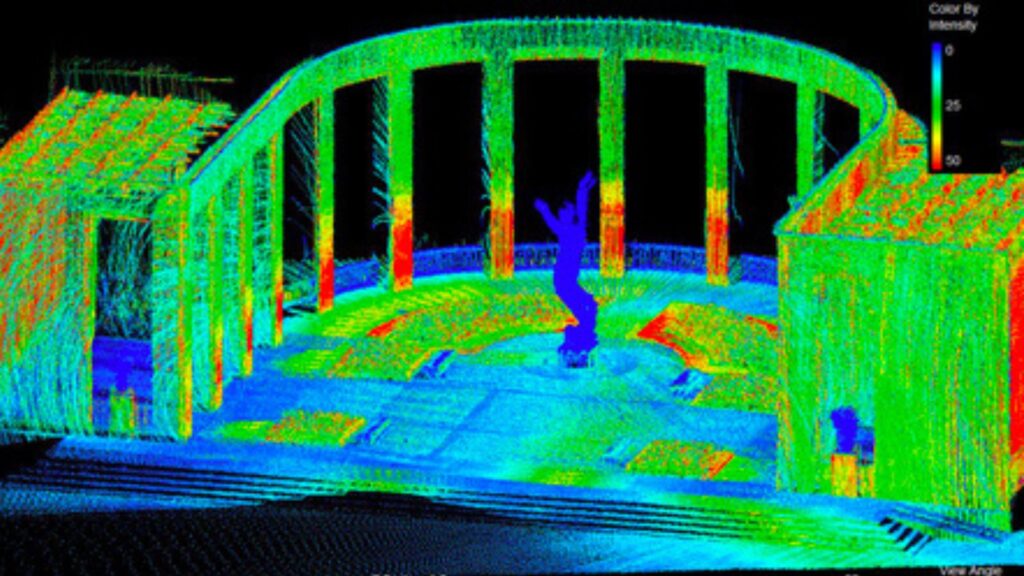
Este projeto massivo combina métodos tradicionais de levantamento topográfico e tecnologias modernas para criar modelos virtuais de ambos os cemitérios.
Os modelos incluem não apenas o terreno subjacente e as coordenadas GPS para cada lápide ou memorial, mas também características como estradas, calçadas, árvores, meios-fios, sarjetas, monumentos e muitas outras estruturas artificiais com uma precisão estimada de 10 cm (3,9 polegadas).
Fotografias geolocalizadas da frente e do verso de cada lápide para auxiliar na identificação completaram a solução de coleta.
Os dados coletados foram processados e integrados no laptop ENFIRE. Graças a essas inovações, os visitantes podem acessar os dados do cemitério, procurar entes queridos ou encontrar sepulturas de importância histórica usando os quiosques nas instalações que estão executando o programa ANC Explorer.
Visitantes virtuais têm funcionalidade idêntica usando o programa em seu computador doméstico ou dispositivo móvel.
Método de Mapeamento Móvel Baseado em Mochila
Para mapear os cemitérios em sua totalidade com o máximo de detalhes, Matthew R. Staley, Cientista de Engenharia Militar e Suporte de Pesquisa no Centro Geoespacial do Exército dos EUA, desenvolveu uma solução de mapeamento móvel baseada em mochila.
O uso do equipamento minimiza os custos, diminuindo os tempos de coleta e fornecendo dados em formatos fáceis de gerenciar. Ele aproveita as ferramentas usadas pelos Serviços de Pesquisa Militar dos EUA, chamadas ENFIRE e GPS-S.
“Eu combinei um LiDAR da Velodyne com o Sistema de Navegação Inercial (INS) Ellipse-D com GPS RTK integrado da SBG Systems”, explica Matthew R. Staley.
Ele escolheu o Ellipse-D por causa de sua solução GNSS e Inercial completa, embalada em um dispositivo compacto e de baixo consumo de energia.
O INS/GNSS fornece compensação de movimento e georreferenciação de nuvens de pontos. Além disso, uma estação base Real Time Kinematic (RTK) foi instalada no cemitério para máxima precisão. Além disso, o software Hypack gerenciou a nuvem de pontos gerada de forma eficiente.
Ajustando a Declinação Magnética
Um dos desafios foi a calibração do magnetômetro, que é afetada pelo teor de ferro do local. A variação da declinação magnética depende da localização; assim, o envio da mochila dos EUA para a França alterou a declinação magnética.
A Agência Nacional Oceânica e Atmosférica dos EUA (NOAA) atualiza um mapa global do campo magnético da Terra a cada 5 anos.
Este mapa pode ser utilizado, considerando uma localização e data específicas, para determinar a declinação magnética naquele local específico.
A SBG Systems incorpora este mapa em seus sistemas de navegação inercial, permitindo o alinhamento automático com o Norte Verdadeiro ao utilizar magnetômetros.
Levantamento ao redor de árvores
Outro desafio foi a pesquisa nas proximidades de certos tipos de árvores que afetam muito a recepção de satélite. O Sr. Staley modificou o procedimento de coleta de dados para compensar esse problema e continua pesquisando maneiras de mitigar ainda mais o efeito da vegetação na recepção.
Além disso, reduzir o alcance do LiDAR para obter uma melhor precisão (+/- 5 cm no geral) será investigado como uma forma de mitigar artefatos de guinada.
“Testarei em breve o software de pós-processamento Qinertia da SBG, ele pode ajudar a manter uma precisão robusta em todas as condições”, acrescenta o engenheiro militar dos EUA.
Softwares de Pós-Processamento Cinemático (PPK) como o Qinertia dão acesso a correções RTK offline e aprimoram o desempenho dos sistemas de navegação inercial através do pós-processamento de dados inerciais com observáveis GNSS brutos usando um cálculo chamado Forward-Backward-Merge.
Lançado recentemente, o software Qinertia foi projetado para ser intuitivo e fácil de usar e foi independentemente caracterizado como o software de pós-processamento mais rápido do mercado.
Qual o próximo passo?
A missão principal era coletar dados relacionados a sepultamentos e confirmar a aplicabilidade dos conjuntos de ferramentas ENFIRE, GPS-S e LiDAR para a operação e gestão do Cemitério Nacional de Arlington.
Eles constataram a capacidade de auditar terrenos, atualizar registros e avaliar construções usando dados LiDAR coletados.
Além disso, desenvolveram planos estratégicos que melhoraram a eficiência em seus processos de negócios.
Agora que a fase piloto foi concluída, o Centro Geoespacial do Exército está colaborando estreitamente com o Cemitério Nacional de Arlington e a Comissão Americana de Monumentos de Batalha para avaliar os resultados e determinar uma estratégia para futuras melhorias e inovações.
Os resultados iniciais demonstraram que os custos foram minimizados em comparação com esforços anteriores. Além disso, várias comunidades obtiveram um excelente retorno sobre o investimento geral.


Ellipse-D
O Ellipse-D é um sistema de navegação inercial que integra uma antena dupla e um GNSS RTK de dupla frequência que é compatível com o nosso software de pós-processamento Qinertia.
Projetado para aplicações robóticas e geoespaciais, ele pode fundir a entrada do odômetro com Pulse ou CAN OBDII para maior precisão de dead-reckoning.

Solicite uma cotação para o Ellipse-D
Você tem perguntas?
Bem-vindo à nossa seção de FAQ! Aqui, você encontrará respostas para as perguntas mais comuns sobre as aplicações que apresentamos. Se você não encontrar o que procura, sinta-se à vontade para nos contatar diretamente!
O INS aceita entradas de sensores auxiliares externos?
Os Sistemas de Navegação Inercial da nossa empresa aceitam entradas de sensores auxiliares externos, como sensores de dados aéreos, magnetômetros, odômetros, DVL e outros.
Essa integração torna o INS altamente versátil e confiável, especialmente em ambientes com GNSS negado.
Esses sensores externos melhoram o desempenho geral e a precisão do INS, fornecendo dados complementares.
Qual é a diferença entre AHRS e INS?
A principal diferença entre um Attitude and Heading Reference System (AHRS) e um Inertial Navigation System (INS) reside em sua funcionalidade e no escopo dos dados que eles fornecem.
O AHRS fornece informações de orientação — especificamente, a atitude (inclinação, rotação) e direção (guinada) de um veículo ou dispositivo. Ele normalmente usa uma combinação de sensores, incluindo giroscópios, acelerômetros e magnetômetros, para calcular e estabilizar a orientação. O AHRS emite a posição angular em três eixos (inclinação, rotação e guinada), permitindo que um sistema entenda sua orientação no espaço. É frequentemente usado em aviação, UAVs, robótica e sistemas marítimos para fornecer dados precisos de atitude e direção, o que é fundamental para o controle e estabilização do veículo.
Um INS não apenas fornece dados de orientação (como um AHRS), mas também rastreia a posição, velocidade e aceleração de um veículo ao longo do tempo. Ele usa sensores inerciais para estimar o movimento no espaço 3D sem depender de referências externas como GNSS. Ele combina os sensores encontrados em AHRS (giroscópios, acelerômetros), mas também pode incluir algoritmos mais avançados para rastreamento de posição e velocidade, muitas vezes integrando-se com dados externos como GNSS para maior precisão.
Em resumo, o AHRS se concentra na orientação (atitude e direção), enquanto o INS fornece um conjunto completo de dados de navegação, incluindo posição, velocidade e orientação.
Qual é a diferença entre IMU e INS?
A diferença entre uma Unidade de Medição Inercial (IMU) e um Sistema de Navegação Inercial (INS) reside em sua funcionalidade e complexidade.
Uma IMU unidade de medição inercial) fornece dados brutos sobre a aceleração linear e a velocidade angular do veículo, medidos por acelerômetros e giroscópios. Ela fornece informações sobre rotação, inclinação, guinada e movimento, mas não calcula dados de posição ou navegação. A IMU projetada especificamente para transmitir dados essenciais sobre movimento e orientação para processamento externo, a fim de determinar a posição ou a velocidade.
Por outro lado, um INS sistema de navegação inercial) combina IMU com algoritmos avançados para calcular a posição, a velocidade e a orientação de um veículo ao longo do tempo. Ele incorpora algoritmos de navegação, como a filtragem de Kalman, para fusão e integração de sensores. Um INS dados de navegação em tempo real, incluindo posição, velocidade e orientação, sem depender de sistemas de posicionamento externos, como GNSS.
Esse sistema de navegação é normalmente utilizado em aplicações que exigem soluções de navegação abrangentes, particularmente em ambientes GNSS, como UAVs militares, navios e submarinos.
O que é GNSS vs GPS?
GNSS significa Global Navigation Satellite System e GPS para Global Positioning System. Esses termos são frequentemente usados de forma intercambiável, mas se referem a conceitos distintos dentro dos sistemas de navegação baseados em satélite.
GNSS é um termo coletivo para todos os sistemas de navegação por satélite, enquanto o GPS se refere especificamente ao sistema dos EUA. Ele abrange múltiplos sistemas que fornecem uma cobertura global mais abrangente, enquanto o GPS é apenas um desses sistemas.
Você obtém maior precisão e confiabilidade com o GNSS, integrando dados de vários sistemas, enquanto o GPS sozinho pode ter limitações dependendo da disponibilidade de satélites e das condições ambientais.
