了解主动升沉补偿
AHC 技术的关键在于集成各种组件,包括运动传感器、液压系统和控制算法。 运动传感器(通常是加速度计和陀螺仪)持续监控船只的运动,并检测由海浪引起的任何升沉。
所收集的数据将传输至控制系统,由其处理信息并确定起重设备位置所需的调整。
然后,液压系统驱动补偿器,动态调整所提升负载的高度,从而抵消船只的运动。 这样可以确保负载保持稳定并处于所需的深度,而不管船只的垂直运动如何。 通过采用 AHC,操作员可以保持对设备的精确控制,并最大限度地降低海上作业期间发生事故和损坏的风险。
了解我们的解决方案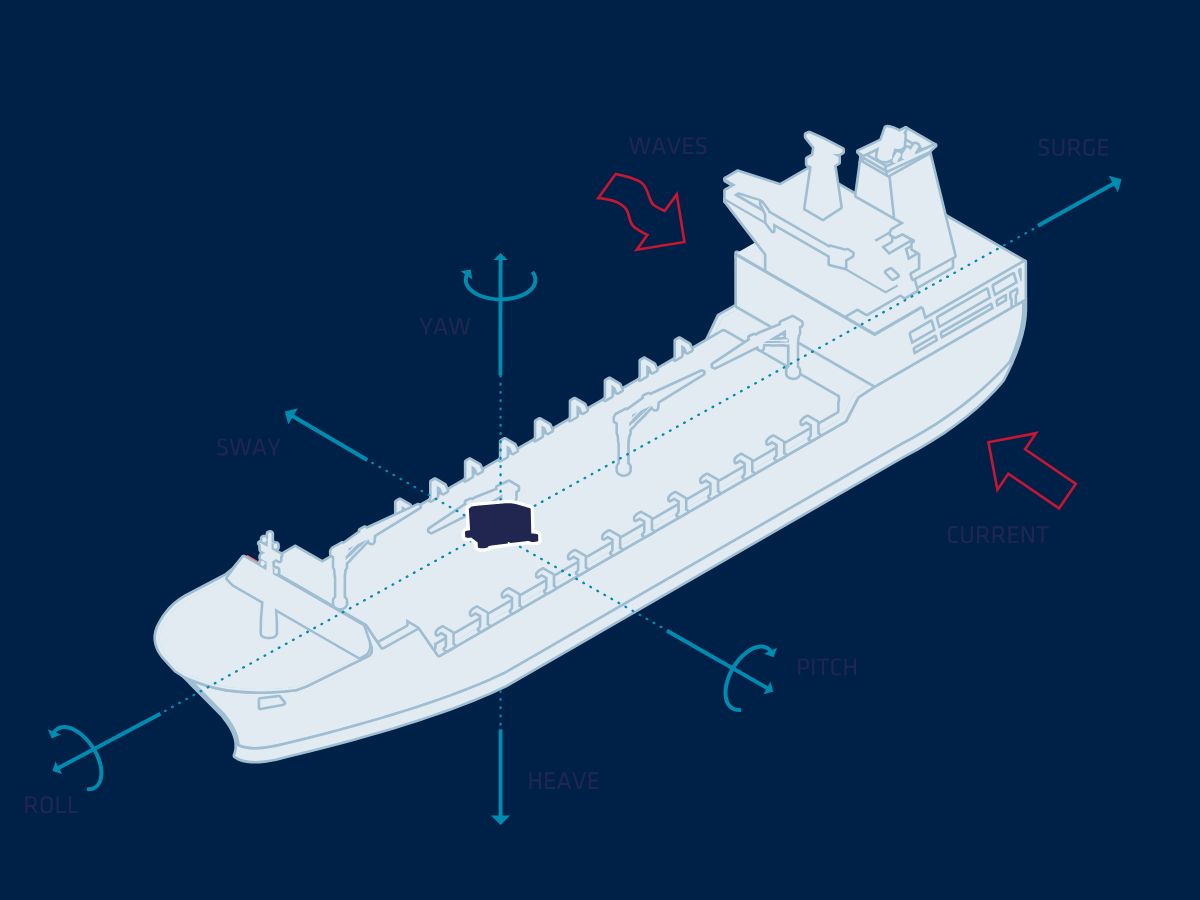
我们的传感器为 AHC 系统带来的好处
将我们的传感器与主动升沉补偿 (AHC) 系统结合使用,可为海上作业带来诸多优势。首先,通过保持稳定的工作平台,AHC 运动传感器可降低作业期间发生事故和受伤的风险,从而保护人员和设备。因此,更高的安全性和效率可降低运营成本并减少停机时间。因此,运营变得更具成本效益,从而节省时间和金钱。
此外,主动升沉补偿系统可以集成到各种船舶和设备中,使其成为适用于不同应用的多功能解决方案。

精准的运动传感器,以抵消海浪的影响
惯性系统在船舶作业的主动升沉补偿 (AHC) 中至关重要。它们增强了动态海洋环境中设备的稳定性和精确性。为了实现这一目标,AHC 系统依赖于关于船舶运动的实时数据,以抵消波浪引起的升沉影响,并确保平稳安全的操作。
ACH 系统利用惯性测量单元 (IMU) 和惯性导航系统 (INS),通过测量和分析船舶的运动来提供这些重要数据。在起重机操作中,惯性系统有助于自主调整起重机的位置,从而降低危险振荡的风险,并确保在动荡的海况下安全地处理负载。
请告诉我们您的项目
了解我们用于主动式升沉补偿的解决方案
我们的惯性解决方案旨在提高动态海洋环境中的运营效率和精度。我们先进的运动传感器可提供实时、准确的数据,以抵消由海浪和涌浪引起的运动。通过集成高性能 IMU 和最先进的算法,我们提供无缝的运动补偿,即使在具有挑战性的条件下也能确保平稳运行。

Ellipse Micro AHRS

OEM Ellipse-A

Ellipse-N

Ellipse-D

Ekinox Micro
地理空间应用手册
立即在您的收件箱中收到我们的地理空间应用手册!
案例分析
通过我们的案例研究集,了解我们的主动升沉补偿解决方案如何改变海洋作业。这些真实的案例清楚地展示了我们的产品在各种应用中的有效性。它们突出了将我们的运动和导航系统集成到您的作业中的优势。






他们在谈论我们
首先直接听取已采用我们技术的创新者和客户的意见。他们的评价和成功案例清楚地表明了我们的传感器对实际 UAV 导航应用产生的重大影响。
探索其他离岸应用
SBG Systems 的先进 惯性导航解决方案 对于各种海上作业都是可靠的。即使在最苛刻的海洋环境中,我们的传感器也能为海上能源、港口管理和水下检测提供可靠的定位、定向和运动数据。
您有疑问吗?
欢迎访问我们的常见问题解答 (FAQ) 专区!在这里,您可以找到关于我们展示的应用的最常见问题的答案。如果您找不到您要查找的内容,请随时直接与我们联系!
主动和被动的升沉补偿之间有什么区别?
主动升沉补偿 (AHC) 和被动升沉补偿 (PHC) 都是用于减轻波浪引起船舶运动的方法,但它们以完全不同的方式运作:
被动式升沉补偿 (PHC)
- 机制: 依赖于机械或液压系统,如弹簧、阻尼器或蓄能器,以吸收和抵消船只的运动。
- 能源:不需要外部电源;它利用系统的自然运动和作用在其上的力来进行调整。
- 控制:非自适应,系统的性能基于预设参数,无法动态调整以适应不断变化的海况。
- 应用: 最适合于稳定、可预测的环境或对精确运动控制要求不高的操作。
主动升沉补偿 (AHC)
- 机制: 使用电机、液压装置或其他动力驱动器,由实时传感器和算法控制,以主动抵消船只的运动。
- 能源:需要外部电源来驱动执行器和控制系统。
- 控制:来自传感器的自适应实时反馈能够进行精确调整,以补偿动态海况。
- 应用: 非常适合需要高精度的操作,例如海底建造、油井干预或科学研究。
AHC 非常适合需要精确控制和主动校正船舶运动的应用,而 PHC 为精度要求不高且被动吸收运动就足够的操作提供了一种更简单、更经济高效的解决方案。
什么是海上起重机中的 AHC?
起重机中的 主动升沉补偿 (AHC) 是一项用于抵消船舶因海浪引起的垂直运动的技术。它确保起重机提升或降低的负载保持稳定,不受海面运动的影响。
AHC 系统在海上作业中尤为重要,在海上作业中,通常使用起重机从动态海况下的船舶或平台提升和降低重型设备、货物或海底设备。这些系统使用传感器(例如加速度计、陀螺仪或运动参考单元)来测量波浪作用引起的船舶升沉(垂直运动)。
基于此实时数据,起重机的 AHC 系统会自动调整绞车或起重机构,以抵消升沉,确保负载相对于海床或固定参考点保持在恒定位置。海上起重机通常使用液压或电力系统来进行这些精确调整。快速调整起重机的绞车或起重机,以与船舶的运动同步地提升或降低负载,从而有效地“消除”由波浪引起的垂直运动。
通过在起吊或下降操作期间稳定负载,AHC最大限度地降低了事故、负载摆动或设备损坏的风险。它允许更安全、更精确的操作,尤其是在放置海底结构或处理精密设备时。
