





Qinertia Програмне забезпеченняINS (PPK)
Точність без зайвих складнощів
Програмне забезпечення Qinertia PPK виводить рішення для високоточного позиціонування на абсолютно новий рівень, забезпечуючи надійну геореференціювання завдяки вдосконаленим корекціям на етапі постобробки. У світі, де точність є беззаперечною вимогою, наше програмне забезпечення PPK стає наріжним каменем для професіоналів та галузей, які прагнуть отримати безпрецедентну впевненість у своїх даних про місцезнаходження.
Програмне забезпечення для постобробки, яке дійсно працює
Досягніть безпрецедентної точності у своїх робочих процесах завдяки постобробці необроблених даних про місцезнаходження за допомогою передових методів корекції. Qinertia відіграє вирішальну роль у сферах, де потрібна точність на рівні сантиметрів, таких як геопросторові зйомки, картографування та гідрографія.




GNSS
Qinertia підтримує GNSS з використанням усіх супутникових груп та частот, забезпечуючи оптимальну точність, надійність та продуктивність у будь-яких умовах.
Підтримувані супутникові групи та частоти:
▶ GPS : L1, L2, L5
▶ Galileo : E1, E5a, E5b, E5(a+b), E6
▶ BeiDou : B1I, B2I, B3I
▶ Glonass : G1, G2
▶ QZSS : L1, L2, L5
Підтримка багаточастотного режиму покращує розв'язання неоднозначностей, час збіжності та точність позиціонування. Це також підвищує стійкість у складних умовах, таких як міські каньйони, густі ліси або райони з високою іоносферною активністю.
Режими обробки
Qinertia пропонує широкий спектр режимів обробки даних, що дозволяють адаптуватися до будь-яких експлуатаційних умов:
▶ PPK з однією базовою станцією
▶ PPK з однією базовою станцією (режим Ionoshield)
▶ PPK з VBS (віртуальною базовою станцією)
▶ PPK у режимі, близькому до реального часу, з поправками RTCM
▶ PPP (Precise Point Positioning) з тісним зв’язком у будь-якій точці світу.
Функції
Orbi AR — PPP із фіксованою неоднозначністю
Функція Orbi AR у Qinertia забезпечує точне позиціонування (PPP) з фіксованими неоднозначностями, надаючи високоточні результати без необхідності використання локальної базової станції. Цей інноваційний підхід ідеально підходить для роботи у віддалених або складних умовах, де мережі CORS недоступні або розгортання персональної базової станції є недоцільним.
Геодезичний движок
Геодезичний движок у Qinertia може похвалитися вичерпним набором інструментів, які не тільки надзвичайно зручні у використанні, але й надзвичайно універсальні.
Завдяки широкому вибору попередньо налаштованих систем координат (CRS) Qinertia дозволяє використовувати основні офіційні системи та перетворення для ваших проєктів. Ви також можете створювати власні перетворення, адаптовані до ваших конкретних або наукових вимог.
Допомога від мультисенсорів
Система Sensor Aiding in Qinertia підвищує якість кінематичних даних після обробки завдяки інтелектуальній інтеграції зовнішніх датчиків руху та швидкості в робочий процес PPK. Окрім високоточної GNSS , Qinertia підтримує вхідні дані від цифрового вікометра (DVL), одометра, магнітометра, загального датчика швидкості та датчика аеродинамічних даних, що дозволяє підвищити точність позиціонування та безперервність траєкторії навіть у складних умовах, де GNSS недостатньо.
Завдяки об’єднанню цих допоміжних джерел під час постобробки Qinertia забезпечує більш плавні траєкторії, зменшує відхилення та надає більш надійні результати навігації у наземних, морських та повітряних системах.
PPK з режимом реального часу RTCM
Тепер ви можете досягти безпрецедентної точності у своїх робочих процесах PPK, обробляючи дані з використанням поправок RTCM, що застосовуються в режимі реального часу. Важливо зазначити, що ця функція спеціально розроблена для сценаріїв з однією базовою точкою в режимі реального часу і несумісна з налаштуваннями VBS.
Потік RTCM у Qinertia встановлює нові стандарти точності та розширює можливості вашої системи PPK.
Згладжування RTS
Розширена опція обробки, призначена для уточнення INS після етапу об'єднання даних з датчиків. Завдяки застосуванню функції згладжування Qinertia усуває всі різкі переходи та раптові стрибки, забезпечуючи не лише більшу точність кінцевих даних траєкторії, а й їхню значно більшу плавність та безперервність.



Зона покриття базових станцій
Компанія Qinertia використовує мережу з понад 10 000 базових станцій у 164 країнах для підвищення GNSS . Ознайомтеся зі станціями на веб-сайті MySBG.
Більше функцій
Відкрийте для себе революційний підхід до обробки GNSS із програмним забезпеченням Qinertia PPK від SBG Systems— його потужні функції спеціально розроблені для того, щоб вивести вашу діяльність на новий рівень!
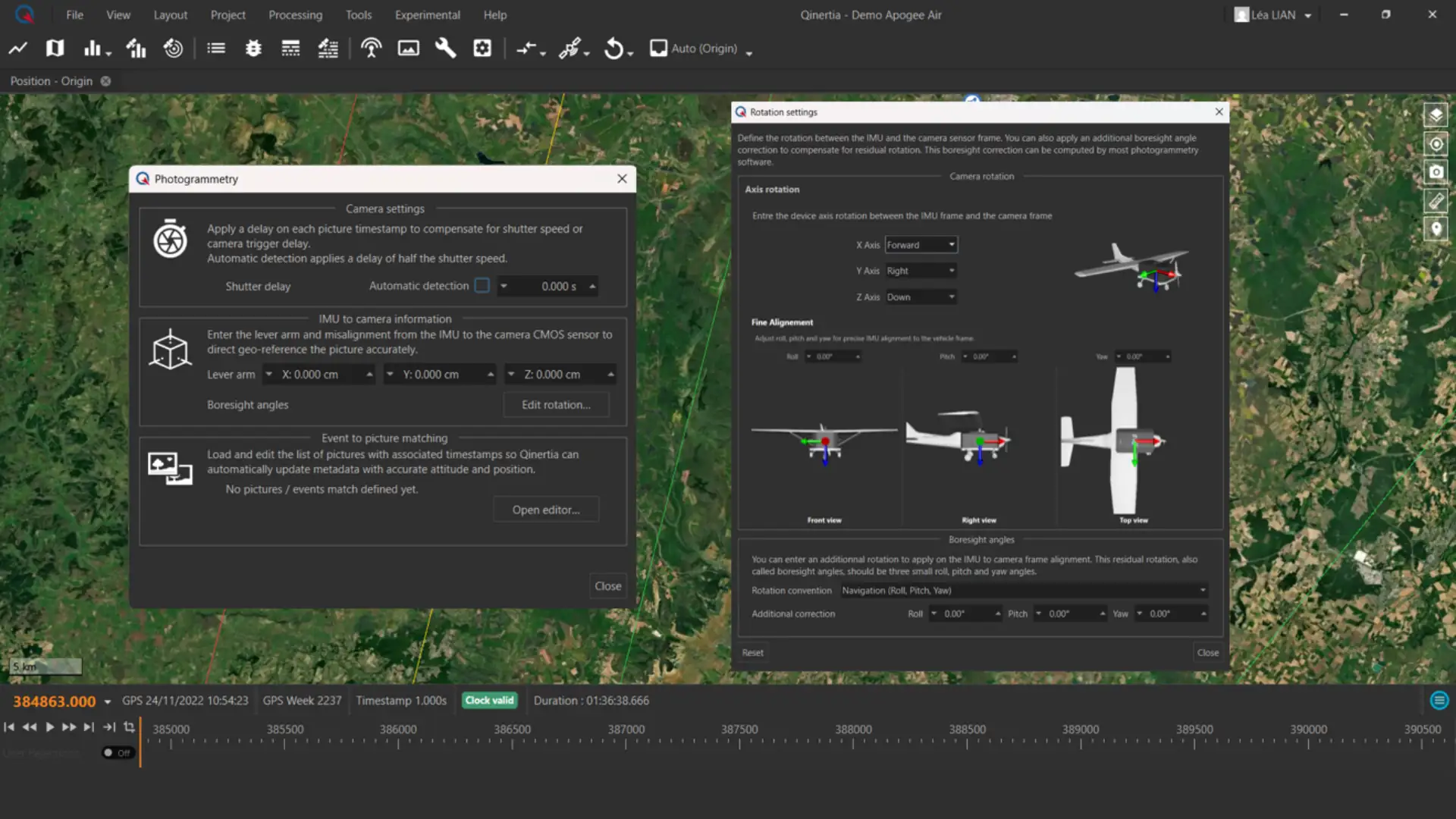
Розширене пряме геореферування
Qinertia підтримує точне пряме геореферування та геотагування зображень завдяки тісній інтеграції IMU GNSS IMU . Використовуючи точні дані про час та вирівнювання датчиків, модуль фотограмметрії зіставляє тригери зображень із траєкторіями PPK та оновлює метадані зображень із позиціонуванням на рівні сантиметрів та повною орієнтацією (roll, pitch, відхилення). Вбудована підтримка параметрів вирівнювання важеля та вісі прицілу забезпечує високу точність даних про положення для використання у робочих процесах 3D-реконструкції з таким програмним забезпеченням, як Pix4D, Metashape та UAS Master.

Тісно пов'язана державно-приватна партнерство
Цей режим забезпечує точність на рівні сантиметрів у будь-якій точці світу без необхідності використання місцевих базових станцій. Завдяки тісній інтеграції необроблених GNSS із точними супутниковими даними він забезпечує надійне високоточне позиціонування навіть у віддалених районах, де відсутні опорні станції. Ідеально підходить для глобальних геодезичних зйомок та роботи в складних умовах.

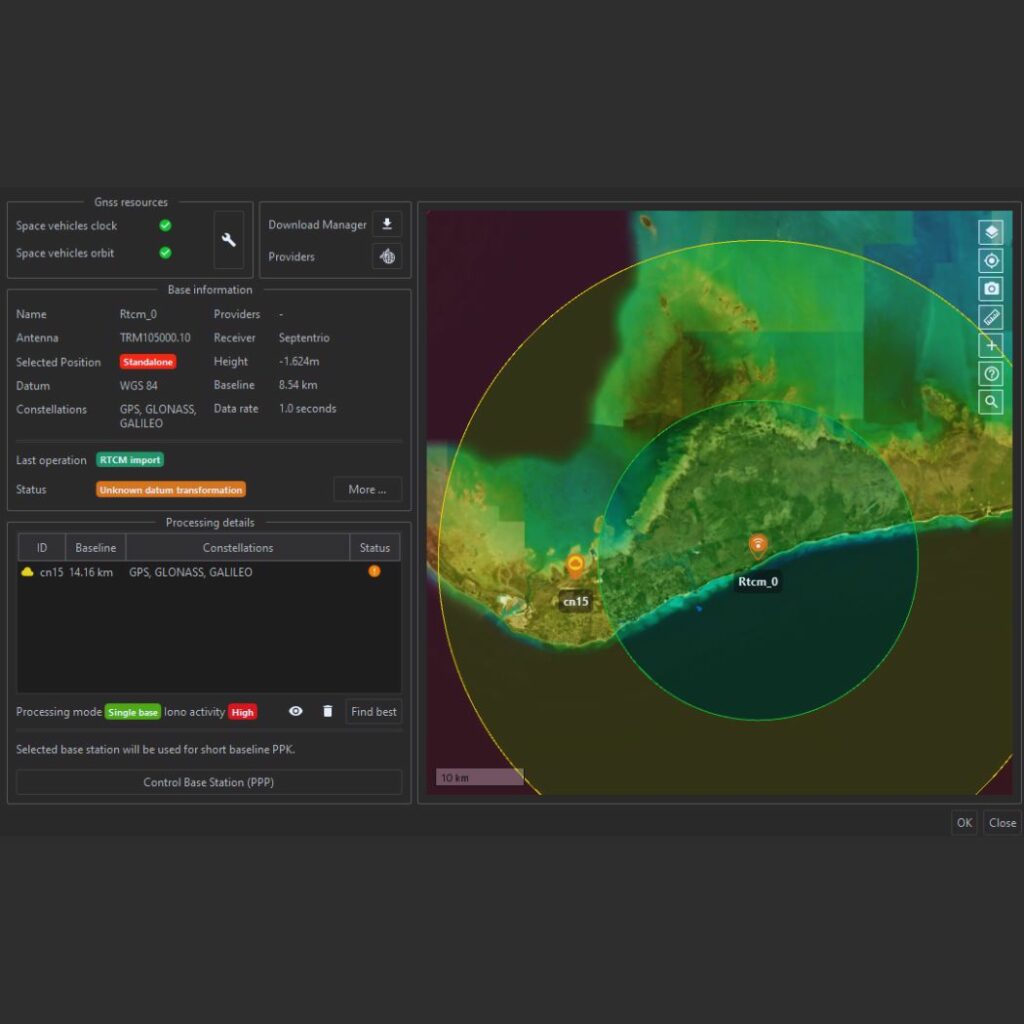
Управління базовими станціями
Qinertia надає користувачам прямий доступ до мережі, що налічує до 10 000 базових станцій у 164 країнах, забезпечуючи точні можливості постобробки. Під час імпортування користувацької базової станції функція контролю базових станцій PPP активно перевіряє її координати за допомогою методів точного позиціонування, підвищуючи точність і надійність.

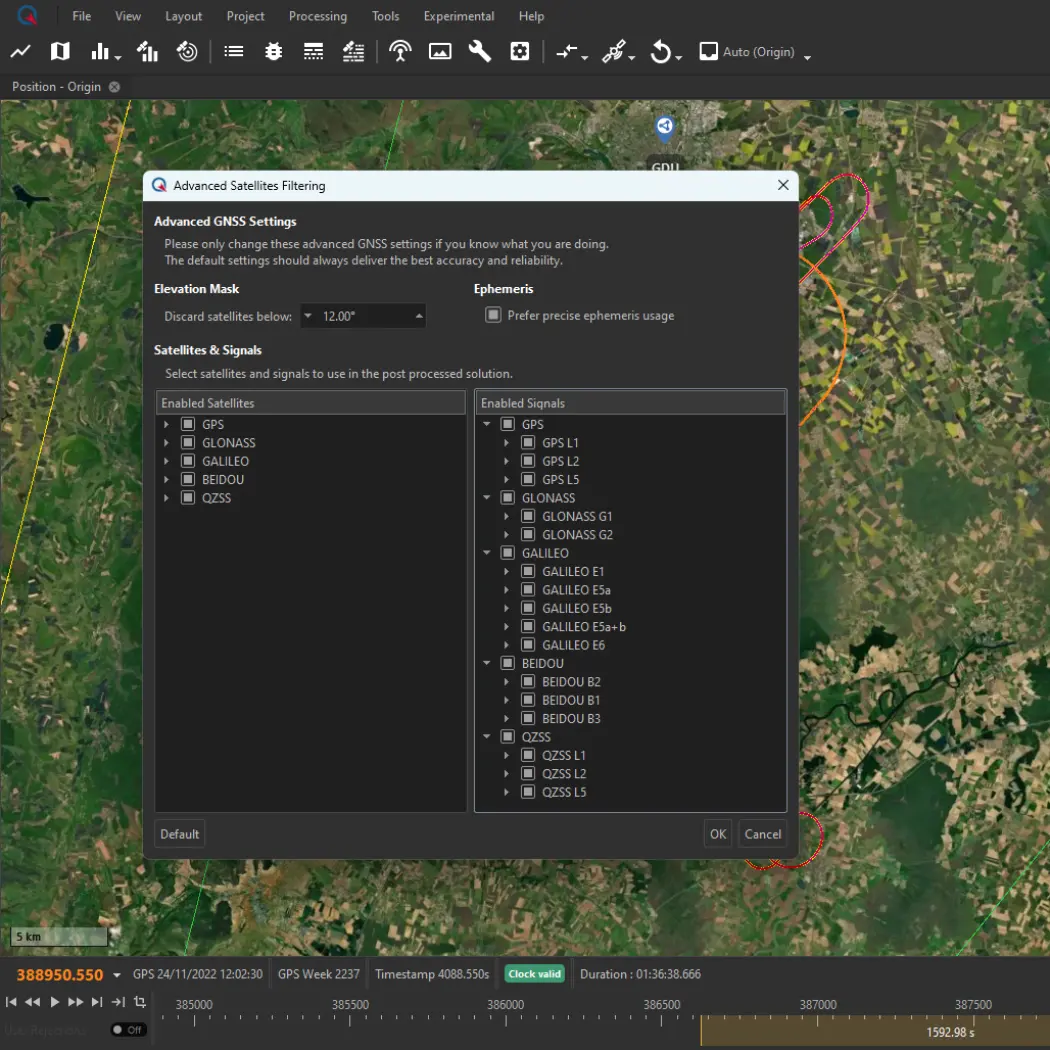
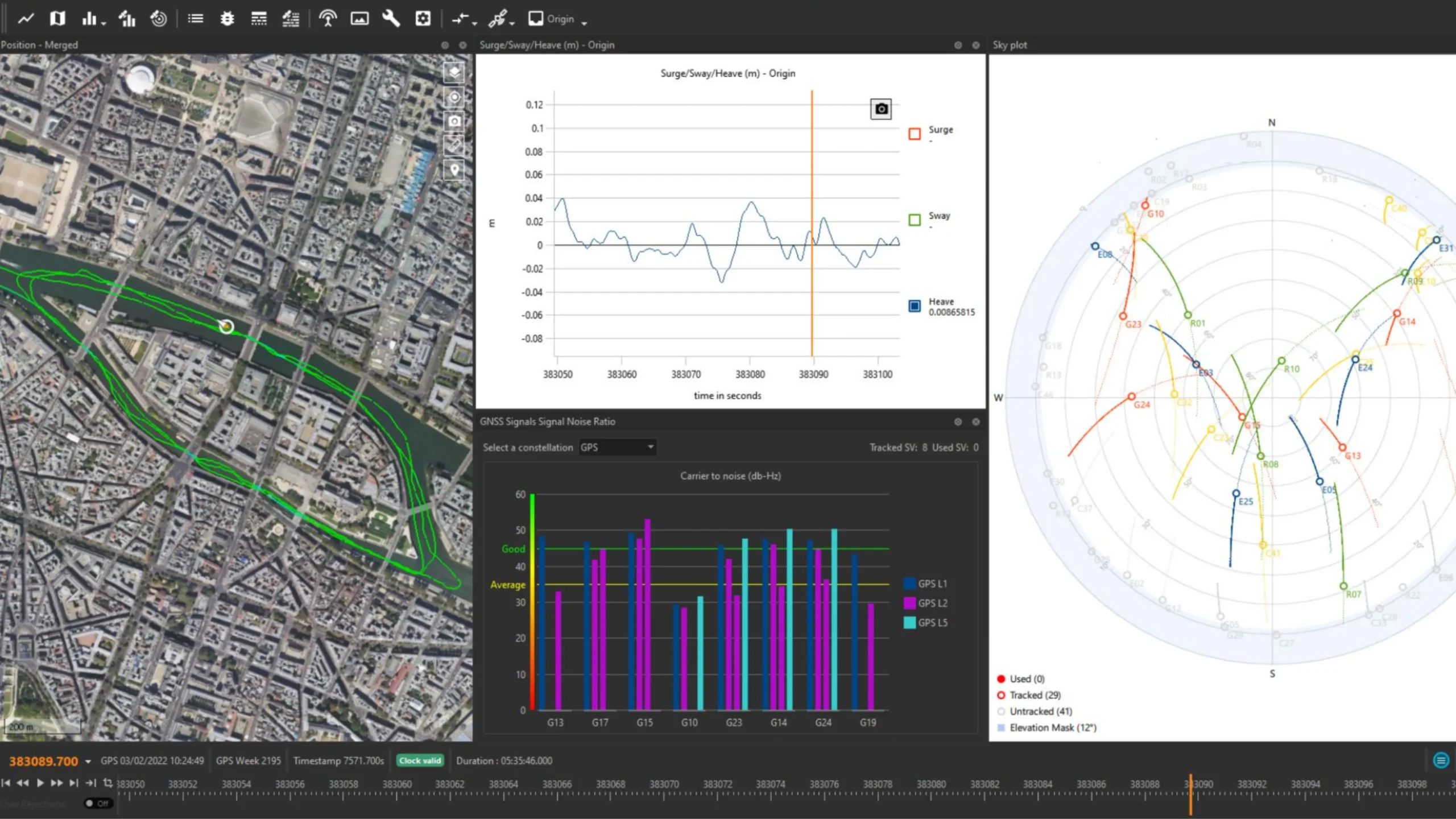
Розширені GNSS та налаштування GNSS
Qinertia автоматично підвищує точність PPK, інтелектуально виключаючи супутники з низькою якістю сигналу, завдяки чому у ваших розрахунках використовуються лише дані найвищої якості. Більше того, тепер користувачі мають можливість самостійно керувати процесом, вручну відключаючи окремі супутники, цілі діапазони сигналів або навіть цілі супутникові групи у своїх PPK-рішеннях. Для підтримки цих розширених можливостей ми запровадили низку інформативних графіків, які дозволяють легко оцінювати якість GNSS . Отримайте повний контроль та впевненість у своїх GNSS завдяки розширеним GNSS та відображенню GNSS у Qinertia.
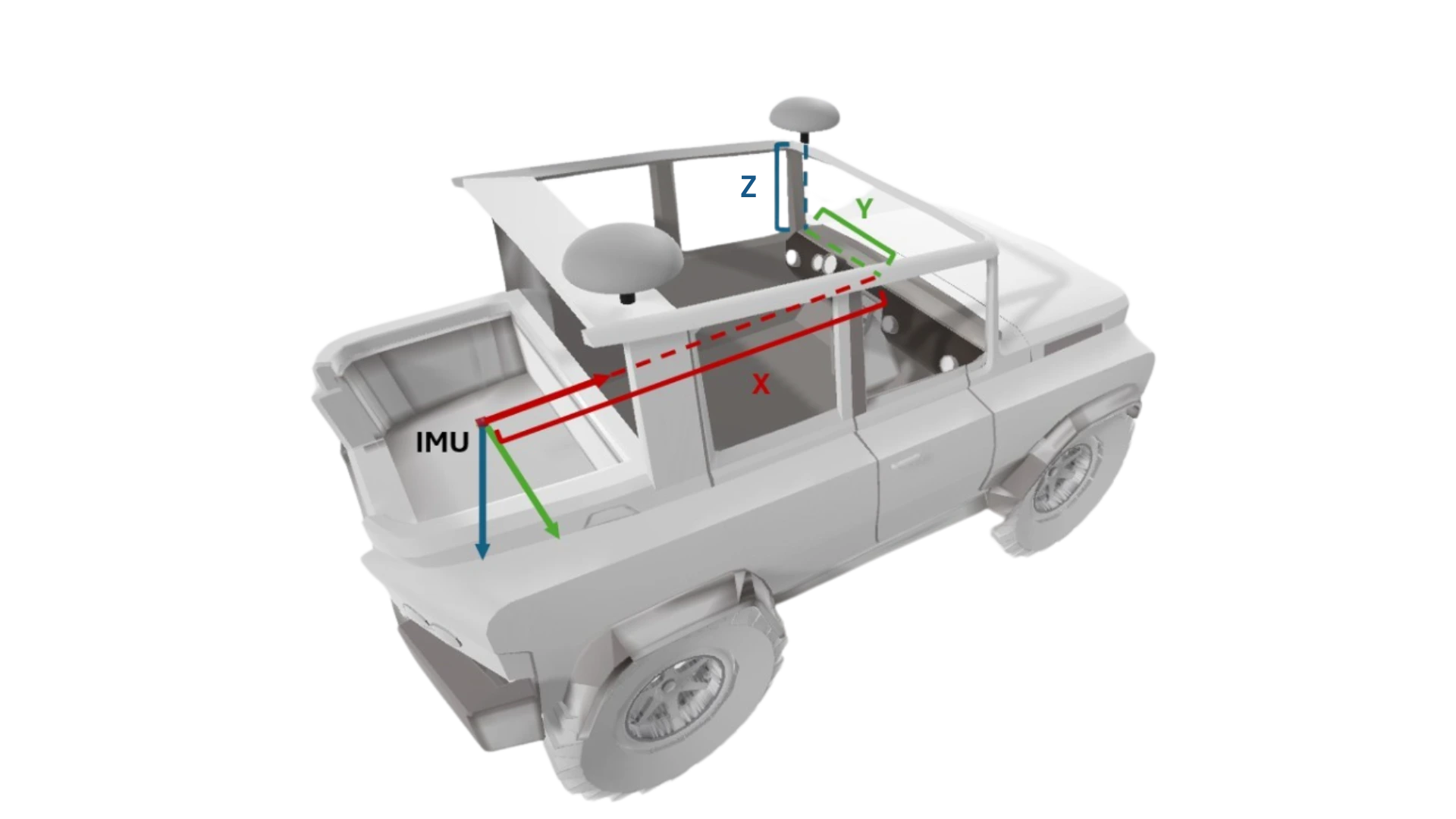
Оцінка довжини важеля
Qinertia пропонує сучасні інструменти для розрахунку плеча важеля, що дозволяють точно визначити фізичні зміщення між GNSS та інерційними вимірювальними блоками (IMU). Якщо ввести приблизне значення плеча важеля, виміряне вручну, Qinertia автоматично уточнить його з точністю до сантиметра, забезпечуючи оптимальне вирівнювання датчиків. Дізнайтеся більше про функцію розрахунку плеча важеля — перейдіть за посиланням!

Гнучка система планування та організації робочого простору
Покращуйте взаємодію з даними та інструментами. Qinertia пропонує рекомендовані макети, адаптовані до конкретних програм, що дозволяє вам зосередитися на аналізі, а не на налаштуванні інтерфейсу.
Ви також можете створювати повністю індивідуальні макети, адаптовані до ваших потреб, і ділитися ними зі своєю командою, забезпечуючи єдине та ефективне робоче середовище. Такий гнучкий підхід до організації робочого простору допомагає командам ефективніше співпрацювати, працювати швидше та підтримувати продуктивність у різних проектах і додатках.
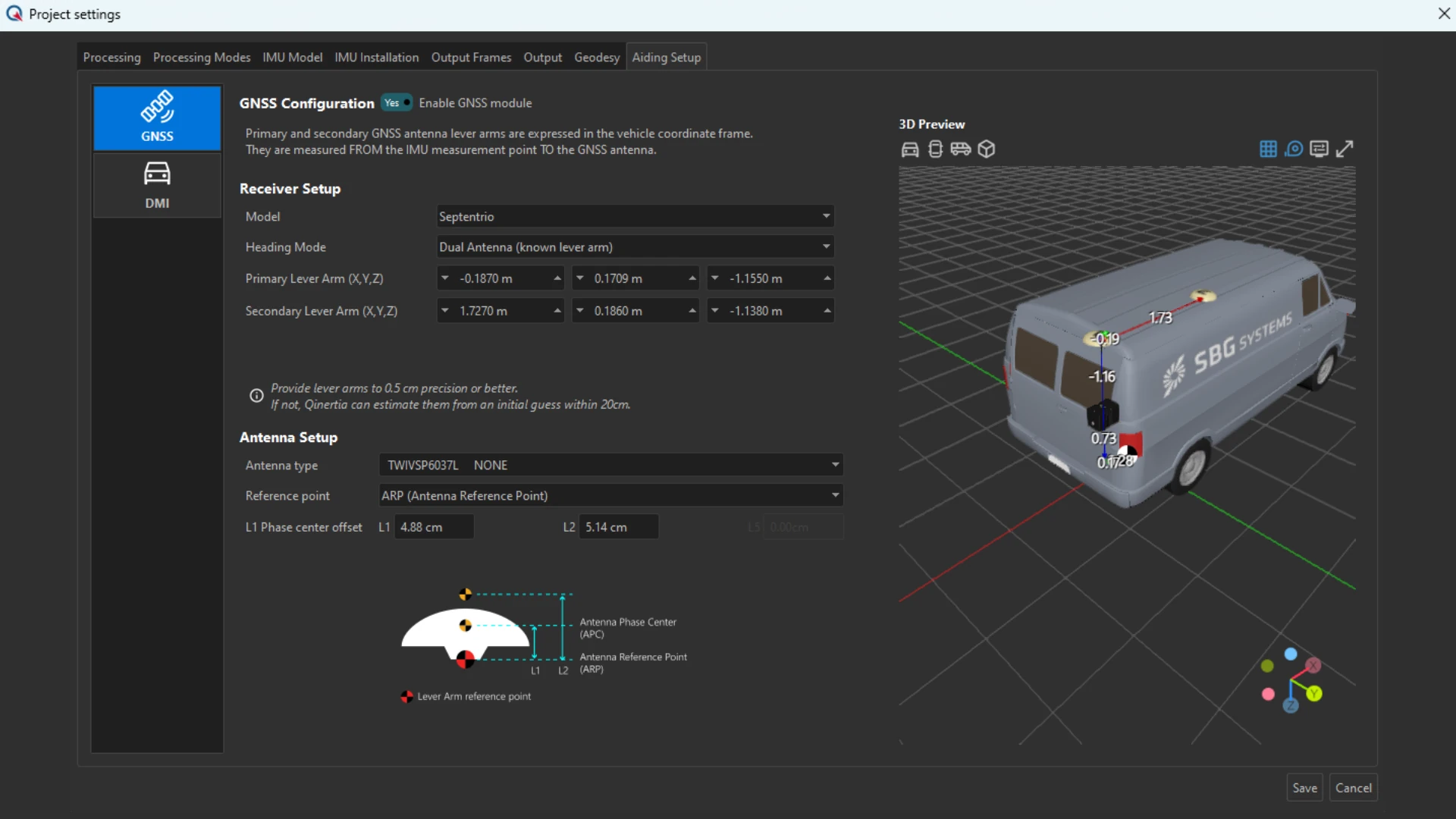
3D-види
3D-вигляд дозволяє візуалізувати установку та конфігурацію в наочному та інтуїтивно зрозумілому 3D-середовищі. Розташування датчиків, їх орієнтація та геометрія платформи відображаються точно, що допомагає перевірити налаштування перед початком обробки.
Такий візуальний контроль забезпечує правильне розміщення датчиків, зменшує кількість помилок під час налаштування та підвищує загальну надійність проекту, що дозволяє вам бути впевненішими як упроцесі збору даних, так і в результатах їх подальшої обробки.

Експорт бінарних файлів із настроюваною траєкторією
Функція експорту бінарних даних траєкторій із можливістю налаштування в Qinertia пропонує більш компактний, швидкий та гнучкий спосіб обробки результатів PPK. Розроблена з урахуванням продуктивності та сумісності, вона дозволяє значно зменшити розмір файлів, зберігаючи при цьому повну цілісність траєкторій.
Завдяки швидшому завантаженню та оптимізованому обміну даними цей формат експорту забезпечує більш плавні робочі процеси між машинами, безперебійну інтеграцію в подальші технологічні ланцюжки та ефективнішу обробку великих проектів.
PPK — простий спосіб отримати точні результати
Наше програмне забезпечення для постобробки PPK забезпечує зручну роботу для всіх користувачів завдяки інтуїтивно зрозумілому інтерфейсу та покроковим інструкціям. Швидке налаштування проектів, введення даних методом «перетягування» та автоматичний вибір оптимальної базової станції спрощують виконання завдань, а розширені налаштування задовольнять потреби експертів. Регулярні оновлення, що враховують відгуки користувачів, забезпечують постійне вдосконалення та функціональність, орієнтовану на потреби користувачів.

Режими обробки PPK
Режими обробки даних Qinertia PPK включають: режим з однією базовою станцією та короткою базовою лінією для локальної точності; режим Ionoshield з однією базовою станцією для зменшення іоносферних перешкод та отримання кращих результатів; режим віртуальної базової станції для професійного картографування коридорів; а також використання тісно інтегрованої технології PPP для стабільного визначення координат незалежно від того, куди вас заведе подорож.
Програмне забезпечення, орієнтоване на користувача
Qinertia має сучасний, зручний інтерфейс, розроблений для швидкого налаштування та ефективної роботи. Його розширений набір інструментів забезпечує точну постобробку даних, надійне моделювання помилок та безперебійну інтеграцію даних.
Регулярні оновлення, що базуються на відгуках користувачів, постійно розширюють функціонал, забезпечуючи оптимальну продуктивність та сумісність із мінливими потребами галузі.
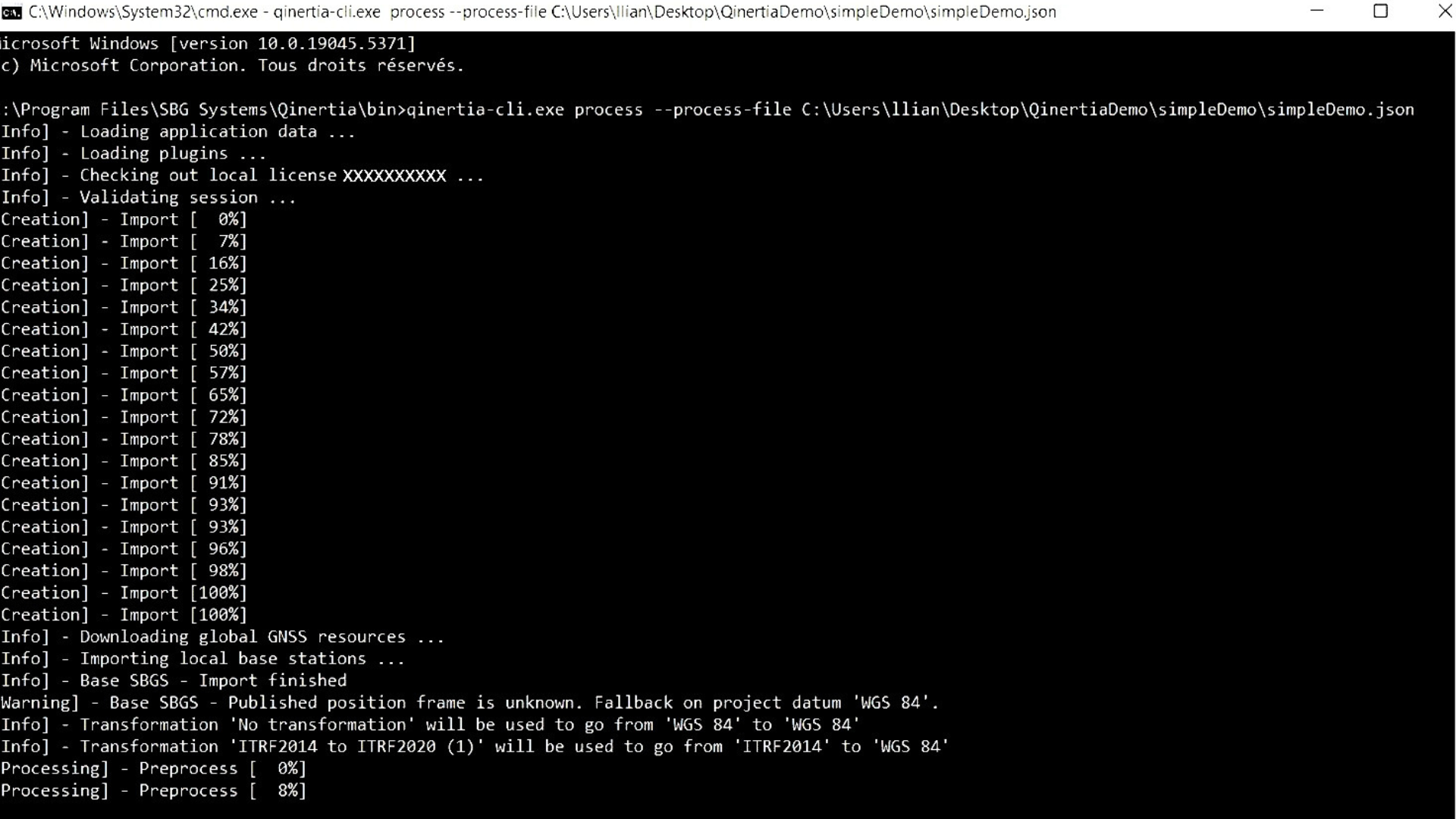
Проста інтеграція в робочий процес
Розробники програмного забезпечення можуть легко інтегрувати потужні можливості PPK від Qinertia у свої додатки за допомогою Qinertia Cloud або командного рядка Qinertia. Інтуїтивно зрозумілий інтерфейс спрощує взаємодію, а командний рядок (CLI) оптимізує обробку повторюваних даних. Розробники можуть налаштовувати формати вихідних даних та створювати детальні звіти, забезпечуючи безперебійну інтеграцію з існуючими робочими процесами.
Наші різні видання
Оберіть ідеальну версію програмного забезпечення Qinertia PPK, яка відповідатиме потребам вашого проєкту. Незалежно від того, чи працюєте ви над масштабною інфраструктурною зйомкою, високоточним картографуванням чи будь-яким іншим проєктом, що вимагає точної GNSS , Qinertia пропонує гнучкі варіанти.
Кожна версія надає потужні функції для обробки необроблених GNSS та досягнення точності на рівні сантиметрів лише за кілька кліків.
| Вид обробки | Тип обробки GNSS | Тип обробки Інерційний + GNSS | Тип обробки Інерційний + GNSS | Тип обробки Інерційний + GNSS |
|---|---|---|---|---|
| Підтримуються IMU від SBG | Підтримуються SBG IMU – | Підтримувані IMU від SBG Ellipse | Підтримуються IMU від SBG Quanta Ellipse Quanta (Quanta Extra) | Підтримувані IMU від SBG Усі IMU від SBG та сторонніх виробників |
| IMU стороннього виробника | IMU стороннього виробника – | IMU стороннього виробника – | IMU стороннього виробника – | IMU стороннього виробника ● |
| Сфери застосування | Застосування Усі | Застосування Наземні та повітряні | Застосування Повітря | Застосування Усі |
| Ліцензія | Ліцензія Безстрокова або за передплатою | Ліцензія Безстрокова або за передплатою | Ліцензія Безстрокова або за передплатою | Ліцензія Безстрокова або за передплатою |
| Паралельна обробка | Паралельна обробка 1 | Паралельна обробка 1 | Паралельна обробка 1 | Паралельна обробка 1 |
| Офлайн-обробка | Офлайн-обробка ● | Офлайн-обробка ● | Офлайн-обробка ● | Офлайн-обробка ● |
| Обробка на сервері | Обробка сервером – | Обробка сервером – | Обробка сервером – | Обробка сервером – |
| Інтерфейс | Інтерфейс GUI + CLI | Інтерфейс GUI + CLI | Інтерфейс GUI + CLI | Інтерфейс GUI + CLI |
| Характеристика руху | Профіль руху Статичний (GNSS), повітряний (БПЛА, літак, вертоліт), наземний (автомобіль, вантажівка, залізниця), морський (морський, морські дослідження в суворих умовах та морський підводний), пішохідний | Профіль руху Статичний (GNSS), повітряний (БПЛА, літак, вертоліт), наземний (автомобіль, вантажівка, залізниця), пішохідний | Характеристика руху Статичний (GNSS), повітряний (БПЛА, літак, вертоліт) | Профіль руху Статичний (GNSS), повітряний (БПЛА, літак, вертоліт), наземний (автомобіль, вантажівка, залізниця), морський (морський, морські дослідження в суворих умовах та морський підводний), пішохідний |
| Тісна інтеграція RTK, VBS та PPP | Тісна інтеграція RTK, VBS та PPP – | Тісна інтеграція RTK, VBS та PPP ● | Тісна інтеграція RTK, VBS та PPP ● | Тісна інтеграція RTK, VBS та PPP ● |
| Переробка | Переробка – | Переробка ● | Переробка ● | Переробка ● |
| Слабка зв'язаність | Слабка зв'язаність – | Слабке зв'язування ● | Слабке зв'язування ● | Слабке зв'язування ● |
| GNSS | GNSS ● | GNSS ● | GNSS ● | GNSS ● |
| Управління базовими станціями | Управління базовими станціями ● | Управління базовими станціями ● | Управління базовими станціями ● | Управління базовими станціями ● |
| Геодезичний движок | Геодезичний движок ● | Геодезичний движок ● | Геодезичний движок ● | Геодезичний движок ● |
| IonoShield | IonoShield ● | IonoShield ● | IonoShield ● | IonoShield ● |
| Мережа CORS | Мережа CORS ● | Мережа CORS ● | Мережа CORS ● | Мережа CORS ● |
| Звіт | Звіт ● | Звіт ● | Звіт ● | Звіт ● |
| Діагностика Rinex | Діагностика Rinex ● | Діагностика Rinex ● | Діагностика Rinex ● | Діагностика Rinex ● |
| Оцінка довжини важеля | Оцінка важеля – | Оцінка довжини важеля ● | Оцінка довжини важеля ● | Оцінка довжини важеля ● |
| Статистика | Статистика ● | Статистика ● | Статистика ● | Статистика ● |




Створіть власне рішення
Qinertia — це програмне забезпечення нового поколінняGNSS , розроблене для всіх користувачів: як для приватних осіб, так і для підприємств, системних інтеграторів, розробників програмного забезпечення та постачальників послуг.
Готові профілі руху об’єктів спрощують налаштування та оптимізують продуктивність відповідно до ваших конкретних потреб.
Оберіть одне з доступних рішень та налаштуйте його під свої потреби: настільне, OEM хмарне.

Просте розгортання
Qinertia Desktop настільна програма, призначена для ефективної обробки складних наборів даних завдяки вбудованим інструментам аналізу та налаштуванням, що можна адаптувати під власні потреби.
Завдяки зручному інтерфейсу ця програма дозволяє швидко імпортувати, обробляти та аналізувати ваші дані.
Ідеально підходить як для окремих користувачів, так і для команд, що працюють в офісі.

Безпроблемна інтеграція з вашим обладнанням або програмним забезпеченням
Qinertia OEM безперебійний процес інтеграції, що дозволяє вам вбудувати потужні засоби обробки даних PPK у ваші рішення та з легкістю надавати своїм клієнтам надійне й ефективне високоточне позиціонування — незалежно від того, чи є ви виробником обладнання, системним інтегратором чи постачальником послуг.
Ви можете налаштувати інтерфейс програмного забезпечення, робочі процеси та функції відповідно до особливостей вашого бренду та потреб користувачів.

Забезпечте гнучке, масштабоване та віддалене управління.
Qinertia Cloud для розробників, інтеграторів та підприємств, які шукають масштабоване рішення для PPK, що дозволяє повністю реалізувати потенціал точної постобробки, поєднуючи це зі зручністю та гнучкістю хмарних технологій.
Незалежно від того, чи ви розробляєте власний додаток, надаєте онлайн-послуги чи розширюєте існуючі можливості, Qinertia Cloud гарантує, що ви зможете забезпечити своїм користувачам найвищу продуктивність PPK.
Сумісний з багатьма приймачами сторонніх виробників
Qinertia сумісна з приймачами сторонніх виробників, які можуть надавати необроблені GNSS , зокрема: Septentrio, Trimble, Novatel, Ublox, Topcon, Javad, Ashtec, GNSS Spectra GNSS
Отримайте доступ до всіх функцій Qinertia: аналіз форматів файлів GNSS , GNSS , за бажанням з інерційним сполученням, GNSS , за бажанням з інерційним сполученням, відображення всіх графіків та аналітики, PPK, виконаний з використанням усіх доступних діапазонів супутникових груп, та багато іншого…
*Підтримувані GNSS : дводіапазонні та вище (L1, L1+L2, L1+L5, L1+L2+L5).
Документація та ресурси
Усі рішення Qinertia Solutions супроводжуються вичерпною документацією, розробленою для надання підтримки користувачам на кожному етапі.
Від інструкцій з установки до розширених налаштувань та усунення несправностей — наші зрозумілі та детальні посібники забезпечують безперебійну інтеграцію та роботу.
Екскурсія по «Qinertia»
Приєднуйтесь до детального огляду нашого програмного забезпечення для постобробки разом із Леєю, менеджером з продуктів компанії Qinertia.

Замовити демо-версію Qinertia
Ознайомтеся з прикладами використання у реальних умовах
Дізнайтеся, як наше програмне забезпечення для постобробки даних QinertiaINS допомагає фахівцям у різних галузях. Від точного геореферування при картографуванні за допомогою БПЛА до вдосконаленої навігації в складних умовах — наші приклади з практики демонструють, як Qinertia забезпечує неперевершену точність та ефективність.
Дізнайтеся, як наші клієнти використовують Qinertia для подолання труднощів, оптимізації роботи та досягнення виняткових результатів.
Програмне забезпечення QinertiaINS обрано для морської геофізики
Подальша обробка даних


Система виявлення дефектів рейок від TREALIS із використанням Apogee Navsight
Визначення місцезнаходження трамваїв та поїздів


Про нас говорять
Ми представляємо досвід та відгуки фахівців галузі та клієнтів, які використовували наші інерційні продукти у своїх проектах.
Дізнайтеся, як наша інноваційна технологія змінила їхню діяльність, підвищила продуктивність та забезпечила надійні результати в різних сферах застосування.
Часті запитання щодо програмного забезпечення для постобробки
У розділі «Часті запитання» щодо програмного забезпечення для постобробки наведено вичерпні відповіді на типові запитання про сучасні інструменти постобробки SBG Systems. У цьому розділі ви знайдете докладні пояснення щодо функціональних можливостей, інтеграції та переваг наших рішень для постобробки. Незалежно від того, чи потрібна вам допомога в оптимізації робочого процесу, з’ясуванні питань сумісності чи усуненні несправностей, цей розділ «Часті запитання» містить корисну інформацію, яка допоможе вам максимально ефективно використовувати наше програмне забезпечення у своїх проєктах.
Ознайомтеся з відповідями та підвищіть ефективність роботи завдяки надійним рішенням для обробки даних.
Які платформи підтримують Qinertia?
Qinertia Desktop як нативна програма для операційних систем Windows та Linux. Вона призначена для локальної інсталяції та забезпечує повний доступ до функцій постобробки та аналізу Qinertia безпосередньо на робочій станції користувача.
Qinertia Server у певних конфігураціях. Ця версія призначена для централізованих або автоматизованих середовищ обробки даних і, як правило, розгортається на виділеній інфраструктурі. Доступність та конфігурація залежать від передбачуваного сценарію використання, вимог до продуктивності та моделі ліцензування.
Доступ Qinertia Cloud через веб-API. На відміну від настільної програми, це рішення дозволяє користувачам інтегрувати обчислювальні можливості Qinertia у власні системи, робочі процеси або програми за допомогою програмного доступу. Цей варіант особливо підходить для автоматизованої обробки даних, хмарних інфраструктур, а також для масштабних або віддалених розгортань.
Що таке GNSS ?
GNSS GNSS GNSS , або PPK, — це метод, за якого необроблені вимірювальні GNSS , записані на GNSS , обробляються після збору даних. Їх можна поєднувати з даними з інших джерел GNSS , щоб отримати найбільш повну та точну кінематичну траєкторію для даного GNSS навіть у найскладніших умовах.
Цими іншими джерелами можуть бути місцеві GNSS станції GNSS , розташовані на території або поблизу об’єкта збору даних, або існуючі постійно діючі опорні станції (CORS), які зазвичай надаються державними органами та/або комерційними операторами мереж CORS.
Програмне забезпечення для кінематичної постобробки (PPK) може використовувати загальнодоступну інформацію про орбіти та годинники GNSS , що дозволяє ще більше підвищити точність. Технологія PPK дає змогу точно визначити місцезнаходження локальної GNSS станції GNSS в абсолютній системі координат, яка використовується.
Програмне забезпечення PPK також може виконувати складні перетворення між різними системами координат для потреб інженерних проектів.
Іншими словами, це дає можливість вносити виправлення, підвищує точність проекту і навіть дозволяє усунути втрати даних або помилки, що виникли під час зйомки або монтажу після завершення місії.
У чому полягає різниця між RTK і PPK?
«Кінематичне позиціонування в режимі реального часу» (RTK) — це метод позиціонування, при якому GNSS передаються майже в режимі реального часу, зазвичай у вигляді потоку поправок у форматі RTCM. Однак можуть виникати труднощі із забезпеченням GNSS , зокрема щодо їх повноти, доступності, зони покриття та сумісності.
Головною перевагою PPK над пост-обробкою RTK є те, що під час пост-обробки можна оптимізувати процеси обробки даних, зокрема пряму та зворотну обробку, тоді як при обробці в режимі реального часу будь-яке переривання або несумісність поправок та їх передачі призведе до зниження точності позиціонування.
Першою ключовою перевагою GNSS (PPK) порівняно з обробкою в режимі реального часу (RTK) є те, що система, яка використовується в польових умовах, не потребує каналу передачі даних або радіозв’язку для передачі поправок RTCM, що надходять із мережі CORS, до GNSS .
Головним обмеженням для впровадження пост-обробки є необхідність того, щоб кінцева програма впливала на навколишнє середовище. З іншого боку, якщо ваша програма може витримати додатковий час обробки, необхідний для отримання оптимізованої траєкторії, це значно покращить якість даних для всіх ваших кінцевих результатів.
Як працює пряма та зворотна обробка?
Уявімо, що посеред зйомки стався 60-секундний GNSS . Похибка визначення координат під час прямих обчислень швидко зростає (швидкість зростання залежить від IMU та інших параметрів) і досягає свого максимуму в кінці перерви. Потім вона швидко відновлюється. При постобробці ми уявляємо, що час тече назад, і виконуємо обробку в антихронологічному порядку, оскільки фізичні рівняння залишаються дійсними. При такій зворотній обробці похибка буде максимальною саме на початку GNSS в GNSS , що дуже симетрично до природної прямої обробки.
Об'єднання цих двох результатів обчислень дає максимальну похибку приблизно в середині періоду відсутності сигналу, причому її величина значно менша, ніж у випадках використання виключно прямих або виключно зворотних обчислень. Це особливо покращить INS , що підтримуються SBG Systems , але й обробка даних GNSS також виграє від такого алгоритму роботи.
Як уже зазначалося, це вдосконалення можна реалізувати лише шляхом подальшої обробки, оскільки для цього необхідні всі дані від початку до кінця, а отже, їх використання доводиться відкласти до завершення опитування.
Що таке геореференціювання в аерофотозйомці?
Геореференціювання — це процес прив’язки географічних даних (таких як карти, супутникові знімки або аерофотознімки) до відомої системи координат, щоб їх можна було точно розмістити на поверхні Землі.
Це дозволяє інтегрувати дані з іншою просторовою інформацією, що дає змогу проводити точний аналіз та створювати карти на основі географічного розташування.
У сфері геодезії геореференціювання відіграє ключову роль у забезпеченні точного прив’язування даних, зібраних за допомогою таких інструментів, як LiDAR, камери або датчики на дронах, до реальних координат.
Завдяки прив'язці кожної точки даних до широти, довготи та висоти над рівнем моря геореференціювання гарантує, що зібрані дані точно відображають місце розташування та орієнтацію на Землі, що має вирішальне значення для таких сфер застосування, як геопросторове картографування, моніторинг навколишнього середовища та планування будівництва.
Геореференціювання зазвичай передбачає використання контрольних точок із відомими координатами, які часто визначаються за допомогою GNSS наземних геодезичних вимірювань, для прив’язки отриманих даних до системи координат.
Цей процес має вирішальне значення для створення точних, надійних і придатних для використання наборів просторових даних.
