
У повсякденних умовах точність автономної глобальної навігаційної супутникової системи (GNSS) цілком достатня для того, щоб допомогти людині знайти шлях, але багато програм вимагають вищої точності. Було розроблено багато технологій диференційних поправок для підвищення точності GNSS 1 см, що відкриває широкі можливості для нових застосувань.
Для досягнення такої точності необхідно приділяти увагу системі координат, що використовується для розрахунків і визначення координат, — це питання розглядається в розділі «Геодезія та перетворення систем координат», що виходить за межі цієї статті.
GNSS
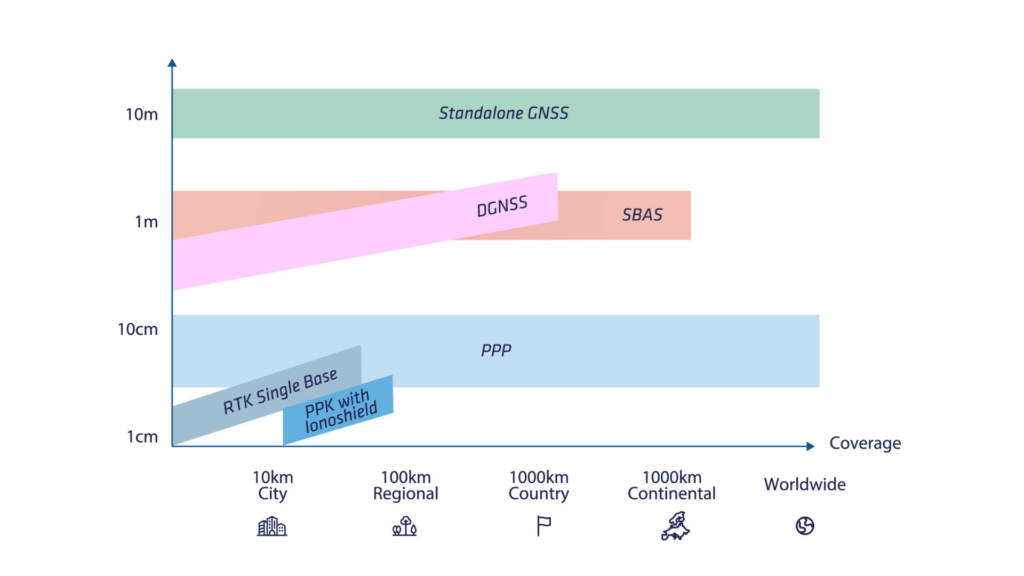
Підвищення GNSS базується на виправленні різних похибок.
Існує багато типів поправок, які забезпечують різні рівні покриття та продуктивності.
Основні з них детально описано в таблиці нижче. У цій статті ми розглянемо основи найпоширеніших корекцій: коротке пояснення DGNSS, а потім детальні пояснення SBAS та RTK; а також опишемо переваги PPK.
У наступній статті цієї серії ми детальніше розглянемо Ionoshield та PPP.
Диференціальна GNSS DGNSS)
Традиційна система DGNSS, що базується на кодах, ґрунтується на простому припущенні: вважається, що похибки супутників та місцеві атмосферні похибки є однаковими на невеликих ділянках. У такому разі за допомогою пари GPS-приймачів можна компенсувати як атмосферні (іоносферні та тропосферні), так і супутникові похибки, тим самим покращуючи якість навігації.
У цьому режимі роботи базовий GNSS встановлюється в межах декількох кілометрів від зони дії GNSS ровера. Базова станція передає набір поправок на приймач ровера за допомогою радіочастотного або GSM-модему. Приймач ровера може потім використовувати ці поправки для обчислення диференціального положення (відносно базової станції).
Ця техніка може підвищити точність навігації до рівня менше метра, але зараз вона застаріла, оскільки RTK став стандартом для високоточного позиціонування.
SBAS (Система супутникового доповнення)
Система SBAS була розроблена для забезпечення безпечної навігації цивільних літаків. З того часу її почали застосовувати в багатьох інших сферах, де потрібна вища точність, ніж та, яку забезпечує автономний GNSS .
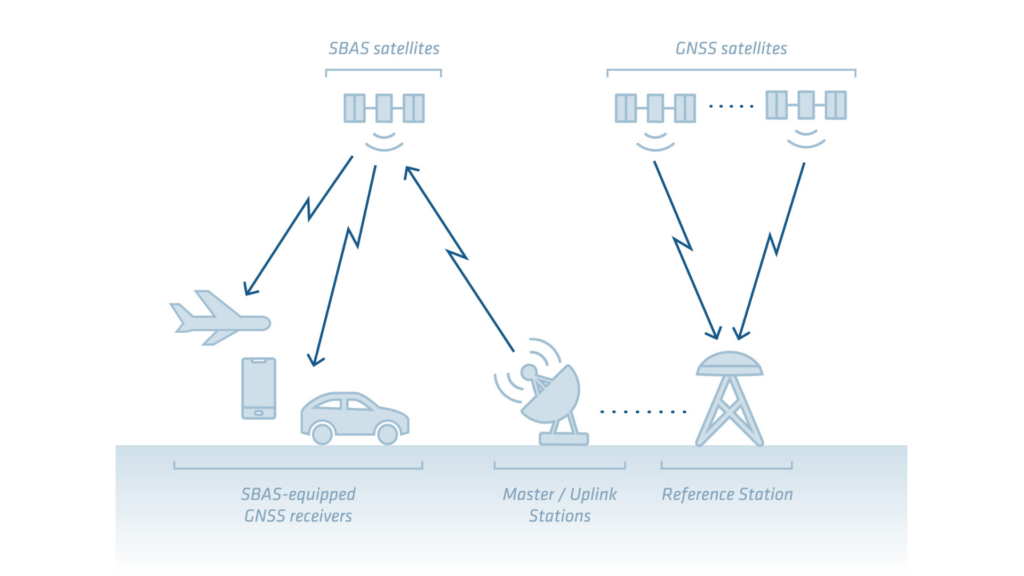
Суть концепції SBAS полягає у використанні мережі опорних станцій для обчислення поправок, які дозволяють підвищити точність GPS на великій території (континентальне покриття).
Ці поправки потім передаються спеціальними геостаціонарними супутниками SBAS. Сучасні GNSS можуть відстежувати ці поправки безпосередньо через свою звичайну GNSS і використовувати їх у своєму механізмі визначення положення, наприклад, SBAS, що забезпечує точність до 1 метра.
Головною метою всіх супутникових груп SBAS є не досягнення максимальної точності, а забезпечення GNSS мінімальної точності для передбачуваного застосування (навігація та посадка літаків) з додатковою концепцією цілісності (точне вимірювання похибки положення).
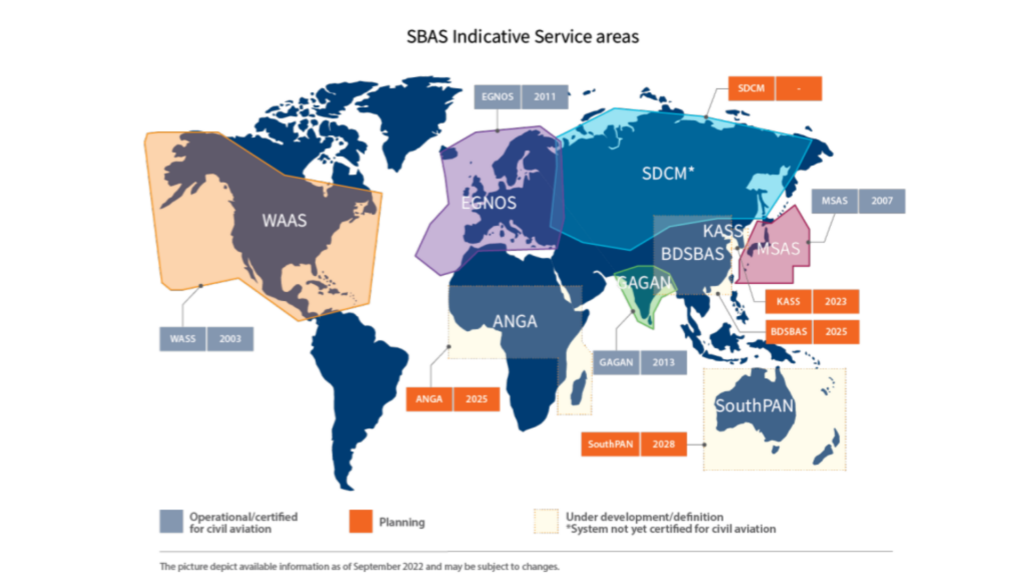
Наразі використовуються такі системи SBAS:
- Система WAAS для країн Північної Америки
- EGNOS для Європи
- GAGAN для Індії
- MSAS для Японії
Однак більшість сучасних систем SBAS надають поправки лише для супутникової групи GPS, що робить їх недостатньо ефективними для наземної навігації. Майбутні рішення SBAS (наприклад, EGNOS V2) забезпечуватимуть поправки для декількох супутникових груп.
Технологія, що лежить в основі SBAS
Різні рішення SBAS використовують одну й ту саму базову технологію для надання поправок. Вони надають поправки для:
- Похибки супутникового годинника
- Відхилення від орбіти супутника
- Помилки, пов’язані з атмосферними умовами
Система SBAS також надає інформацію про цілісність супутників, яку можна використовувати для відкидання даних від супутників, що працюють з перебоями.
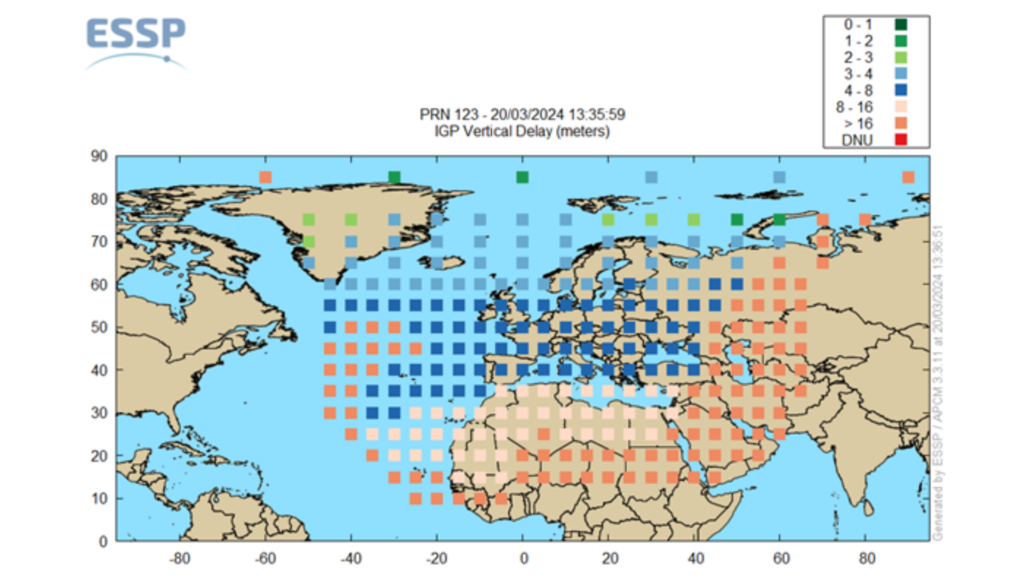
Атмосферні поправки також обчислюються за допомогою мережі базових станцій для отримання картини атмосферних похибок. Передане значення похибки відповідає вертикальній затримці, спричиненій атмосферою в певних точках, які називаються IGP (точки іоносферної сітки). Після цього приймач може скоригувати затримку для різних сигналів від кожного супутника.
Використовуючи інформацію, що надається системою SBAS, приймач може коригувати похибки вимірювань на основі псевдодальності, підвищуючи точність визначення координат приблизно до 1,2 м (середньоквадратичне відхилення) по горизонталі та 1,6 м (середньоквадратичне відхилення) по вертикалі. Це є значним покращенням порівняно з автономною GNSS, особливо щодо вертикальної складової.
Кінематика в реальному часі (RTK) та постпроцесована кінематика (PPK)
Технологія RTK була вперше запроваджена для геодезичних застосувань у середині 1990-х років. Як і традиційна диференціальна система глобального позиціонування (DGPS), RTK покладається на точно розташовану базову станцію та роверні GNSS-приймачі.
Два ключові етапи обчислень забезпечують сантиметрову точність позиціонування:
- Подвійна різниця
- Вимірювання фази несучої та усунення неоднозначності
Подвійна різниця
Система DGPS зазвичай використовує лише вимірювання одинарної різниці та коду.
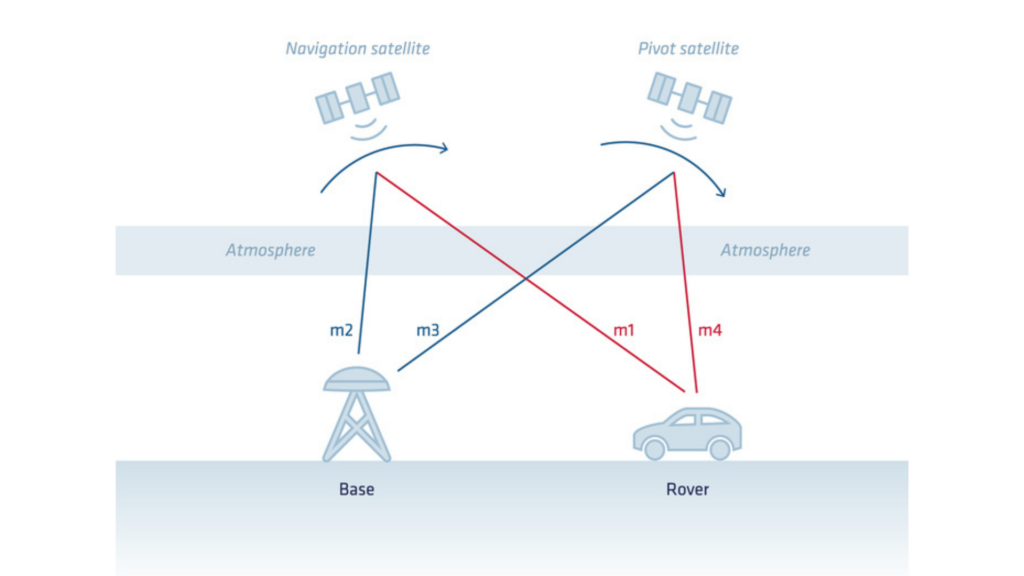
Натомість система RTK додає фазові вимірювання та використовує підхід «подвійної різниці». У цьому методі вимірювання базової станції віднімаються від вимірювань ровера, а всі вимірювання навігаційних супутників віднімаються від вимірювань опорного супутника.
Цей підхід дозволяє компенсувати всі похибки, спричинені супутниками, приймачем, а також атмосферні похибки, які вважаються постійними в околицях базової станції.
З цього розрахунку отримуємо:
- Координати ровера (широта/довгота/висота) у системі координат базової станції
- Епоха марсохода
Відстань між базовою станцією та ровером називається базовою лінією і є ключовим фактором у системі RTK. Зі збільшенням базової лінії похибка дещо зростає, оскільки загальні атмосферні похибки та загальні похибки орбіти супутників не компенсуються повністю. Це і є типове значення «+1 ppm», яке вказується у технічних характеристиках точності позиціонування RTK.
Вимірювання фази несучої та усунення неоднозначності
Вимірювання фази несучої, про яке йшлося в нашій попередній статті, необхідне для зменшення похибок до сантиметрового рівня.
Складність вимірювань фази несучої полягає в тому, що вони за своєю природою є неоднозначними (або неповними). У вимірюванні відсутня ціла кількість циклів фази несучої. Ця відсутня частина також відома як «невизначеність».
Процес позиціонування в режимі реального часу (RTK) починається з оцінки цих неоднозначностей. Цей процес також відомий як режим «RTK Float». У цьому режимі неоднозначності повільно збігаються, але не є цілочисельними значеннями. Це дозволяє приймачу згладжувати положення та досягати точності приблизно на рівні дециметра.
Для досягнення максимальної точності та надійності наступним кроком є визначення цілочисельного значення для кожної з цих неоднозначностей у реальному часі. Цей процес називається вирішенням цілочисельної неоднозначності.
Результат вирішення неоднозначності максимізує точність RTK та забезпечує більшу надійність. Це зазвичай називають режимом «RTK Fixed».
Якщо відстеження фази певного супутника переривається, відбувається «зсув циклу», і цілочисельна неоднозначність для цього супутника повинна бути вирішена знову. З цієї причини занадто багато зсувів циклу (а особливо зсувів циклу на всіх супутниках одночасно) негативно впливають на продуктивність RTK. Для обмеження таких випадків необхідні якісна антена та її правильне розміщення, а також чисте радіочастотне середовище.
Пост-обробка кінематики
Як ми вже бачили, RTK — це застосування цих поправок «у реальному часі», що означає: для розрахунку RTK-даних у польових умовах ровер повинен мати канал передачі даних із базовою станцією.
Деякі програми не потребують траєкторії в режимі реального часу, але можуть отримати вигоду від вищої точності або простішої настройки. Кінематична постобробка (PPK) може задовольнити ці потреби. За допомогою PPK ровер збирає власні необроблені GNSS під час збору даних, не отримуючи поправок у режимі реального часу. Пізніше ці дані піддаються постобробці з використанням точної інформації від базової станції або мережі опорних станцій.
Технологія PPK забезпечує більшу гнучкість у зборі даних, оскільки не потребує корекції в режимі реального часу. Її часто застосовують у ситуаціях, коли зв’язок у режимі реального часу є складним або непотрібним, наприклад, під час аерофотозйомки, зйомки за допомогою дронів або наукових досліджень.
Переваги використання PPK для диференціальних поправок.
PPK забезпечує такі основні переваги при обробці даних GNSS:
- Оптимізований робочий процес у польових умовах: Основні витрати під час виконання завдань із використанням RTK пов’язані з необхідністю забезпечення наявності базової станції поблизу, її налаштуванням у разі потреби, забезпеченням надійного з’єднання для передачі даних тощо. Qinertia має у своєму розпорядженні велику кількість вбудованих мереж CORS, а також прямий доступ до мереж сторонніх розробників. Це дозволяє уникнути складнощів, пов’язаних із забезпеченням наявності базової станції та налаштуванням надійного з’єднання для передачі даних.
- Покращений контроль якості: Існує чимало показників якості, які допомагають оцінити фактичну ефективність обробки даних. До них належать розширені статистичні показники, показник розбіжності (різниця між координатами та орієнтацією, обчисленими під час прямої та зворотної обробки), а також показники GNSS .
- Загальне підвищення продуктивності: усунення неоднозначності RTK може зайняти деякий час (від кількох секунд до кількох хвилин залежно від відстані до базової станції та атмосферних умов). Це може мати істотне значення на початку процесу пошуку сигналу або в складних GNSS . Технологія PPK пом’якшує ці ефекти завдяки обробці даних як у прямому, так і в зворотному напрямках, що дозволяє максимально підвищити частоту отримання координат. Продуктивність також можна підвищити за допомогою більш досконалих алгоритмів або використання точних ефемерид супутників.
