
Вирішення неоднозначності в технології точного точкового позиціонування (PPP) — це метод, що дозволяє усунути цілочисельну неоднозначність у вимірюваннях фази несучої. Головна мета полягає в тому, щоб підвищити точність PPP з рівня сантиметрів до рівня міліметрів. Розблокування цих цілочисельних значень дозволяє PPP підвищити точність позиціонування та скоротити час збіжності. Підхід, що поєднує PPP з усуненням неоднозначності (AR), який часто називають PPP-AR, використовує ретельно змодельовані фазові та кодові зміщення, а також високоточні продукти супутникових годинників.
Процес усунення неоднозначності служить для зменшення невизначеностей і дозволяє оцінювачу розглядати вимірювання фази як фіксовані цілі числа. Це, у свою чергу, сприяє підвищенню надійності та точності. Ми дослідили взаємодію та перехресну валідацію продуктів фазових зміщень, згенерованих різними аналітичними центрами. Мета цього аналізу — сприяти встановленню узгоджених стандартів, полегшити об’єднання результатів та заохотити впровадження в режимі реального часу.
На практиці було показано, що усунення неоднозначності в рамках PPP прискорює збіжність, покращує частоту визначення координат та підвищує цілісність позиції навіть у складних умовах прийому сигналу. У міру розширення GNSS та вдосконалення методів моделювання PPP з усуненням неоднозначності стає ключовим інструментом для високоточних застосувань, від геодезії до автономної навігації.
SBG Systems нову технологію під назвою Orbi AR (Ambiguity Resolution), яка забезпечує точність на рівні сантиметрів за допомогою GNSS використання локальних опорних станцій або щільної наземної інфраструктури.
Чому варто використовувати Orbi AR, а не RTK?
У цьому розділі ми розглянемо ключові фактори — зокрема швидкість розгортання, експлуатаційну стійкість та зручність користування — які змінюють баланс сил, надаючи чіткі аргументи на користь вибору універсальності та доступності Orbi AR замість традиційних обмежень RTK на сучасних складних будівельних майданчиках.
RTK – диференціальна система GNSS
Система RTK працює за допомогою двох приймачів:
- Приймач базової станції встановлюється у відомому, фіксованому місці; він обчислює похибки, порівнюючи своє відоме положення з отриманим GNSS .
- Ровер (статичний/кінематичний), який отримує поправки на похибки від приймача сусідньої базової станції та застосовує їх до власного сигналу для визначення високоточного відносного положення.
Точність дуже висока, але ровер повинен знаходитися відносно недалеко від базової станції (зазвичай від 10 до 30 км, залежно від атмосферних умов), оскільки багато похибок (наприклад, атмосферні затримки) мають локальний характер.
Orbi AR — точне позиціонування точки
Замість використання однієї локальної базової станції для визначення відносних похибок, Orbi AR використовує загальнодоступні глобальні корекційні дані для розрахунку власного абсолютного положення з високою точністю, діючи повністю автономно. Глобальні корекційні дані містять високоточну інформацію про орбіти супутників та їхні годинники, а також моделі атмосферних затримок.
| Особливість | Orbi AR | RTK |
|---|---|---|
| Місцева базова станція | Не потрібно | Необхідно |
| Обсяг | Глобальний | Місцевий (одна база в радіусі 30 км; VRS в радіусі 80 км) |
| Точність | Статична похибка 2–5 см (2 сигма) Кінематична похибка 2–3 см (1 сигма) | Сантиметр (см) |
| Налаштування | Простий (лише один приймач) | Складний (потрібна локальна настройка) |
Якщо говорити простіше, цю різницю можна уявити собі так: це як двоє учнів, які готуються до тесту. RTK — це як учень, який бере приватні уроки, де один уже знає правильну відповідь і використовує свій досвід, щоб допомогти іншому виправити помилки.
А Orbi AR, навпаки, — це як учень, який працює самостійно, але ретельно перевіряє свої відповіді за підручником. Хоча приватний репетитор може бути дещо точнішим, його набагато складніше організувати, і це коштує дорожче. І хоча обидва підходи дають точні результати, саме спосіб отримання виправлень — через репетитора, що знаходиться поруч (RTK), або через загальнодоступний підручник (PPP) — і відрізняє їх один від одного.
Як працює Orbi AR?
На роботу стандартного GNSS впливають кілька суттєвих похибок:
- Похибки орбіти супутника: Супутник знаходиться не саме там, де вказано в його сигналах.
- Похибки супутникового годинника: Атомний годинник супутника має незначні, але суттєві похибки у вимірюванні часу.
- Атмосферні затримки: іоносфера та тропосфера уповільнюють і відхиляють GNSS .
Ці помилки передачі та синхронізації в сукупності призводять до неточностей у розрахунковому положенні приймача. Докладніше про це див. у розділах GNSS джерела помилок » і «Вплив атмосферних помилок на обробку даних RTK та PPK».
Основний принцип роботи Orbi AR полягає у виправленні зазначених вище похибок за допомогою точних даних корекції:
- Міжнародна GNSS ( GNSS ) з надзвичайною точністю обчислює точну орбіту та точну похибку годинника для кожного супутника.
- Глобальна мережа опорних станцій діє у всіх регіонах і використовує складні алгоритми для визначення орбіти та оцінки фазового зсуву супутників.
- Після формування фазового зміщення на кількох контрольних станціях запускається спеціальний етап верифікації, під час якого перевіряються вимірювання кожного супутника з урахуванням встановлених поправок.
- Використовує двочастотні GNSS для компенсації іоносферної затримки та отримання вимірювань без впливу іоносфери, не покладаючись на зовнішні іоносферні моделі
- Для оцінки та математичного розрахунку затримки в тропосфері застосовується метод розширеного моделювання.

Основні переваги Orbi AR
Orbi AR є кардинальним проривом у способах збору, візуалізації та використання точних геопросторових даних у польових умовах, що значно виходить за межі традиційних обмежень, пов’язаних із суто супутниковим позиціонуванням. Нижче наведено основні переваги Orbi AR:
- Глобальне покриття: забезпечення високої точності в відкритому океані, пустелі або будь-якому віддаленому місці без необхідності встановлення місцевої базової станції.
- Висока точність: позиціонування з точністю до сантиметра [Звіт про випробування буде опубліковано найближчим часом]
- Уніфікація даних у різних регіонах: забезпечення однакової точності в усьому світі.
- Швидка конвергенція: сучасні методи дозволяють скоротити час, необхідний для досягнення точності на рівні сантиметрів
- Масштабованість: ідеально підходить для масового ринку та глобальних застосувань, оскільки не потребує локальних опорних станцій.
- Економічна ефективність: зменшення залежності від щільних наземних корекційних мереж, що дозволяє знизити витрати на інфраструктуру.
Orbi AR у програмному забезпеченні Qinertia
Програмне забезпечення для постобробки Qinertia виводить Orbi AR на новий рівень, поєднуючи його з геодезичним двигуном Qinertia та технологіями обробки даних.
Geodesy Engine: перетворення точності Orbi AR у локальний контекст
Хоча рішення Orbi AR забезпечують високу точність визначення координат, перед кінцевими користувачами залишається серйозна проблема: переведення цих результатів із системи ITRF 2020 у місцеву систему координат для порівняння з відомими опорними точками. Цей важливий крок часто вимагає складних геодезичних перетворень, що створює високий ризик помилок для нефахівців.
Qinertia безпосередньо вирішує цю проблему за допомогою вбудованого геодезичного двигуна. Цей двигун має у своєму розпорядженні вичерпну базу даних загальнодоступних перетворень, що дозволяє здійснювати безперебійне та точне перетворення координат. Обробляючи всі перетворення систем координат внутрішньо, двигун Qinertia усуває одне з основних джерел потенційних помилок. Він гарантує, що координати, отримані за допомогою PPP, автоматично та правильно виражаються у бажаній системі координат користувача, роблячи весь робочий процес від необроблених даних до корисних, локалізованих результатів простішим та надійнішим.
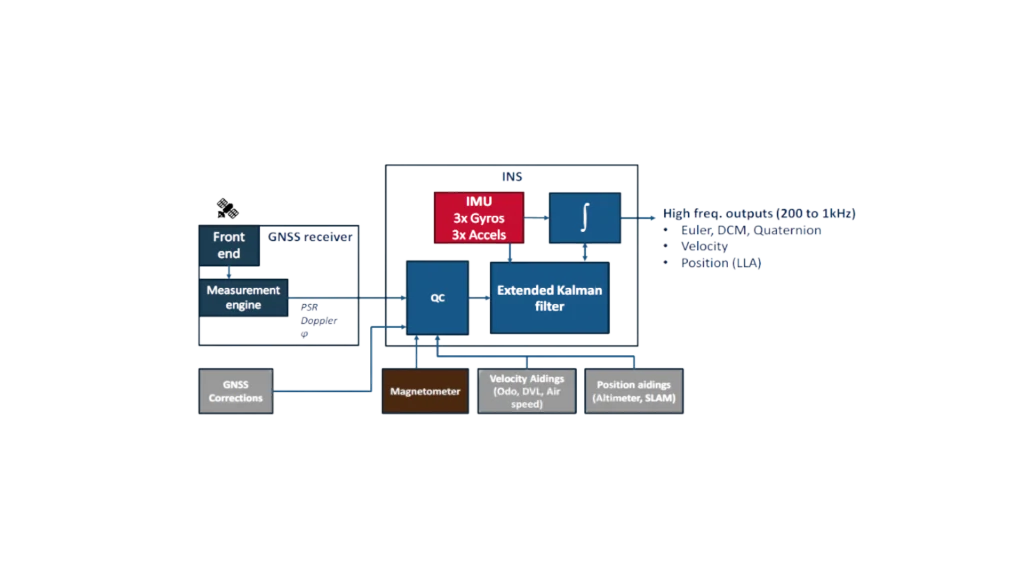
Технологія обробки: поєднання Orbi AR з IMU безпрецедентної надійності
Обчислювальне ядро Qinertia розроблено з метою забезпечення максимальної надійності Orbi AR; воно використовує технології прямого, зворотного та злиття обчислень, що скорочує час збіжності, зменшує рівень шуму та підвищує надійність.

Крім того, режим обробки даних із тісним зв’язком PPP об’єднує необроблені вимірювання від GNSS та поєднує їх із даними IMU базовому рівні, забезпечуючи більш надійне та безперервне навігаційне рішення. Тісний зв’язок з IMU додаткові обмеження, що сприяє скороченню часу збіжності та значно прискорює повторну збіжність після втрати сигналу.
Orbi AR у Qinertia Cloud
Qinertia Cloud сучасна хмарна веб-платформа GNSS , розроблена компанією Qinertia. Завдяки новітній технології Orbi AR Qinertia Cloud ваші необроблені GNSS на високоточні результати безпосередньо у вашому веб-браузері.
Відкрийте для себе Qinertia Cloud