
W codziennym scenariuszu dokładność autonomicznego Globalnego Systemu Nawigacji Satelitarnej (GNSS) jest więcej niż wystarczająca, aby pomóc komuś znaleźć drogę, ale wiele aplikacji wymaga większej dokładności. Opracowano wiele technologii poprawek różnicowych, aby poprawić dokładność GNSS do 1 cm, umożliwiając szeroki zakres nowych zastosowań.
Osiągnięcie takiej dokładności wymaga zwrócenia uwagi na układ odniesienia używany do obliczeń i wyników pozycjonowania, co jest tematem omówionym w Geodezji i Transformacjach Datum, który wykracza poza zakres tego artykułu.
Poprawki GNSS
Poprawa dokładności GNSS opiera się na korygowaniu różnych błędów.
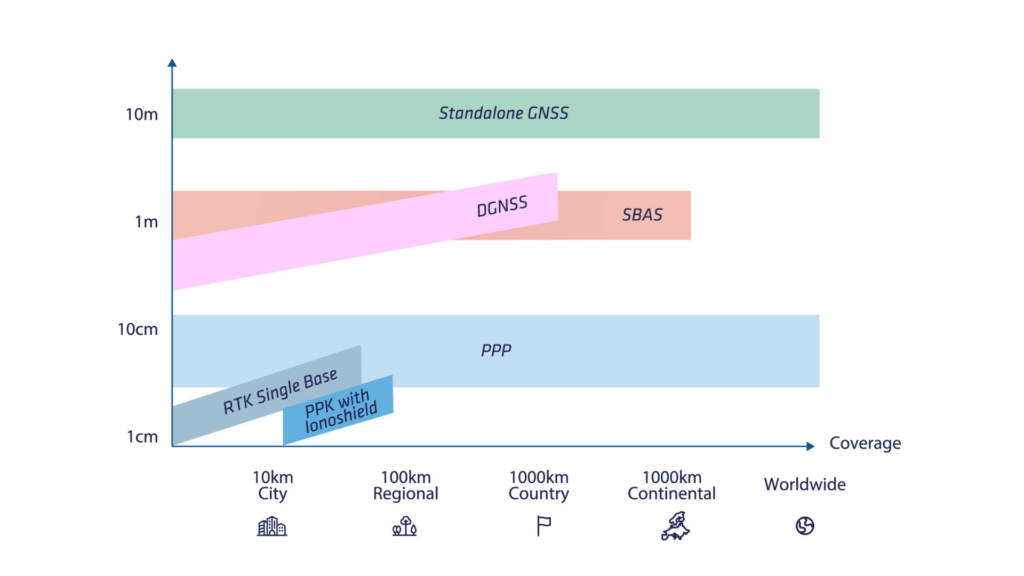
Istnieje wiele rodzajów poprawek, które zapewniają różne poziomy pokrycia i wydajności.
Główne z nich są szczegółowo opisane w poniższej tabeli. W tym artykule omówimy podstawy najpopularniejszych poprawek: krótki opis DGNSS, a następnie szczegółowe wyjaśnienia SBAS i RTK; oraz opiszemy korzyści płynące z PPK.
Następny artykuł z tej serii przyjrzy się bliżej Ionoshield i PPP bardziej szczegółowo.
Różnicowy GNSS (DGNSS)
Tradycyjny DGNSS oparty na kodzie opiera się na prostym założeniu: błędy satelitarne i lokalne błędy atmosferyczne są takie same na małych obszarach. Para odbiorników GPS może być następnie użyta do wyeliminowania zarówno błędów atmosferycznych (jonosferycznych i troposferycznych), jak i satelitarnych, poprawiając w ten sposób wydajność nawigacji.
W tym trybie pracy stacja bazowa odbiornika GNSS jest zainstalowana w odległości kilku kilometrów od zakresu działania odbiornika GNSS rovera. Stacja bazowa przesyła zestaw poprawek do odbiornika rovera za pomocą modemu RF lub GSM. Odbiornik rovera może następnie wykorzystać te poprawki do obliczenia pozycji różnicowej (względem stacji bazowej).
Technika ta może poprawić dokładność nawigacji do poziomu poniżej metra, ale jest już przestarzała, ponieważ RTK stał się standardem dla pozycjonowania o wysokiej dokładności.
SBAS (Satellite Based Augmentation System)
SBAS został opracowany, aby umożliwić bezpieczną nawigację cywilnych statków powietrznych. Od tego czasu jest używany w wielu innych aplikacjach dla użytkowników końcowych, które wymagają większej dokładności niż samodzielny odbiornik GNSS.
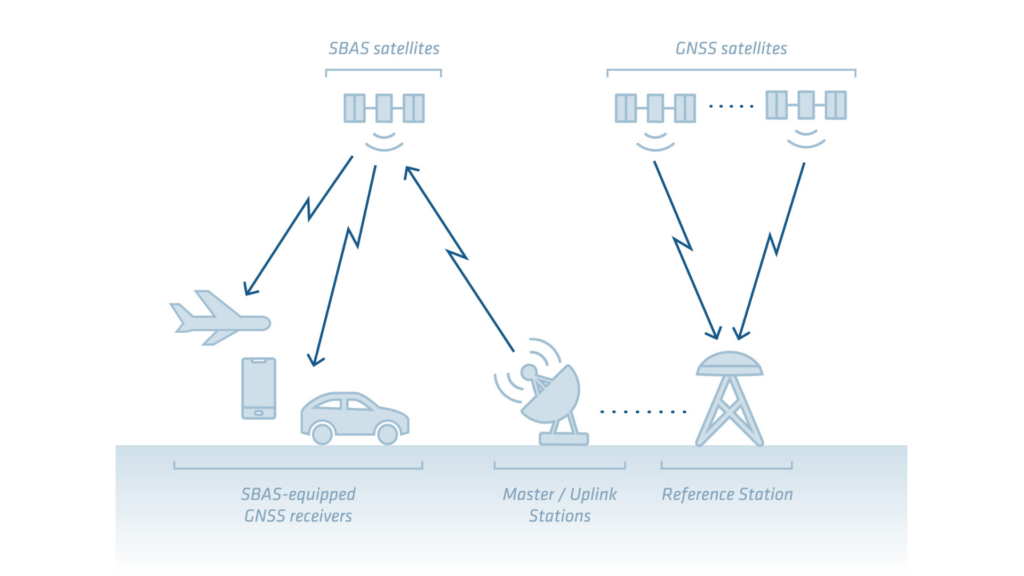
Koncepcja SBAS polega na wykorzystaniu sieci stacji referencyjnych do obliczania poprawek, które mogą poprawić wydajność GPS na dużym obszarze (pokrycie kontynentalne).
Poprawki te są następnie transmitowane przez dedykowane satelity geostacjonarne SBAS. Nowoczesne odbiorniki GNSS mogą śledzić te poprawki bezpośrednio przez swoją zwykłą antenę GNSS i wykorzystywać je w swoim silniku pozycjonowania, takim jak SBAS, który zapewnia dokładność 1 metra.
Głównym celem wszystkich konstelacji SBAS nie jest osiągnięcie maksymalnej dokładności, ale umożliwienie GNSS osiągnięcie minimalnej dokładności dla zamierzonego zastosowania (nawigacja i lądowanie statków powietrznych) z dodaną koncepcją integralności (dokładny pomiar błędu pozycji).
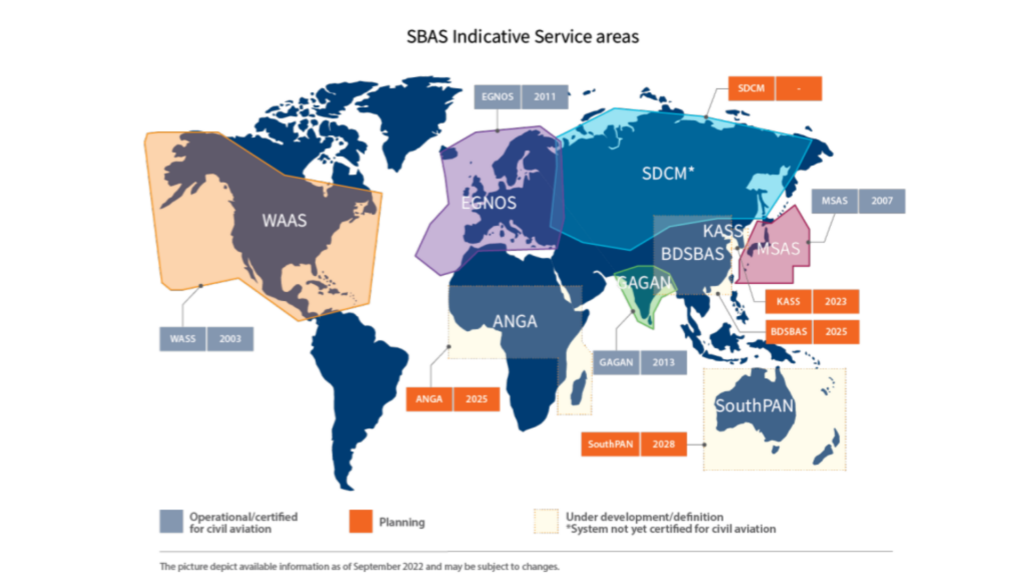
Obecnie używane SBAS obejmują:
- WAAS dla krajów Ameryki Północnej
- EGNOS dla Europy
- GAGAN dla Indii
- MSAS dla Japonii
Jednakże, większość obecnych systemów SBAS zapewnia korekcje tylko dla konstelacji GPS, co czyni je suboptymalnymi dla nawigacji lądowej. Przyszłe rozwiązania SBAS (np. EGNOS V2) będą zapewniać korekcje dla wielu konstelacji.
Technologia stojąca za SBAS
Różne rozwiązania SBAS wykorzystują tę samą podstawową technologię do zapewnienia korekcji. Zapewniają one korekcje dla:
- Błędów zegarów satelitarnych
- Odchyleń orbit satelitarnych
- Błędy atmosferyczne
SBAS dostarcza również informacje o integralności satelitów, które mogą być wykorzystane do odrzucenia danych z wadliwie działających satelitów.
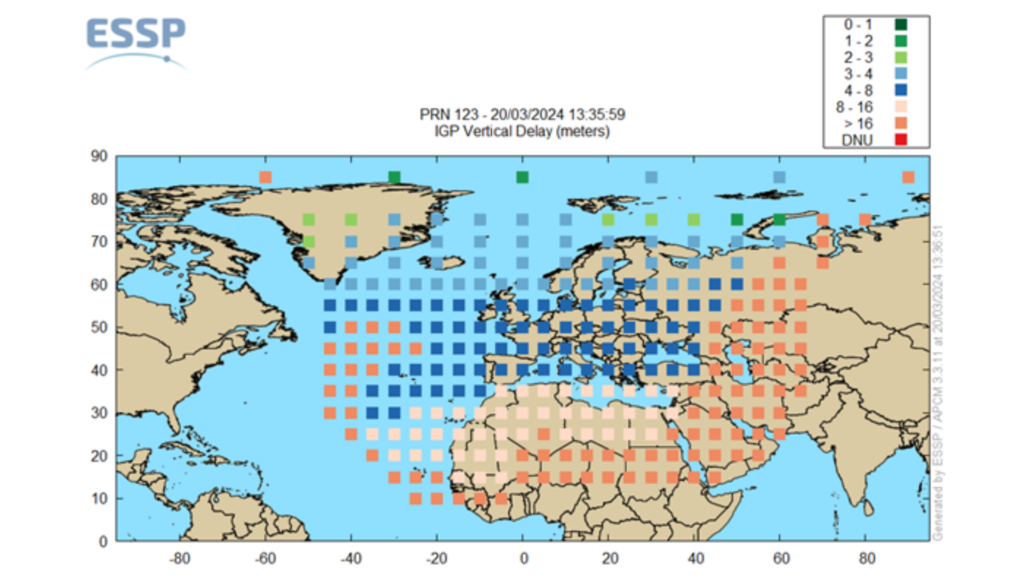
Korekty atmosferyczne są również obliczane przy użyciu sieci stacji bazowych w celu zapewnienia wzorca błędów atmosferycznych. Przesyłana wartość błędu odpowiada opóźnieniu pionowemu wprowadzonemu przez atmosferę w danych punktach zwanych IGP (Ionospheric Grid Points). Odbiornik może następnie skorygować opóźnienie dla różnych sygnałów z każdego satelity.
Wykorzystując informacje dostarczone przez SBAS, odbiornik może korygować błędy w pomiarach pseudoodległości, poprawiając dokładność pozycji do około 1,2 m RMS w poziomie i 1,6 m RMS w pionie. Jest to znacząca poprawa w porównaniu do samodzielnego GNSS, szczególnie dla komponentu pionowego.
Real Time Kinematic (RTK) i Post-Processed Kinematic (PPK)
Technologia RTK została po raz pierwszy wprowadzona do zastosowań geodezyjnych w połowie lat 90. Podobnie jak tradycyjny system różnicowego pozycjonowania globalnego (DGPS), technologia RTK opiera się na precyzyjnie zlokalizowanej stacji bazowej oraz GNSS typu rover.
Dwa kluczowe etapy obliczeniowe umożliwiają pozycjonowanie z centymetrową dokładnością:
- Podwójne różnice
- Pomiar fazy nośnej i ustalanie niejednoznaczności
Podwójne różnice
DGPS generalnie wykorzystuje tylko pojedyncze różnice i pomiary kodowe.
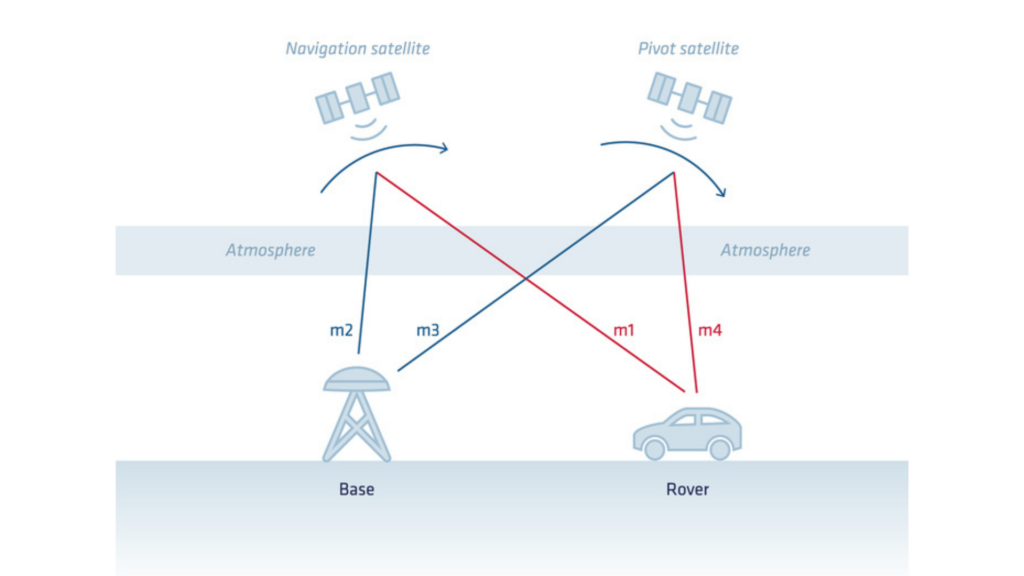
Z drugiej strony, RTK dodaje pomiary fazowe i wykorzystuje podejście “podwójnych różnic”. W tej metodzie pomiary ze stacji bazowej są odejmowane od pomiarów z rovera, a wszystkie pomiary z satelitów nawigacyjnych są odejmowane od satelity centralnego (pivot satellite).
Takie podejście może kompensować wszystkie błędy indukowane przez satelity, błędy indukowane przez odbiornik, jak również błędy atmosferyczne, które zakłada się, że są stałe w pobliżu stacji bazowej.
Z tego obliczenia otrzymujemy:
- Pozycję rovera (szerokość/długość geograficzna/wysokość) w układzie odniesienia stacji bazowej
- Czas rovera
Odległość między stacją bazową a roverem nazywana jest bazą i jest kluczowym czynnikiem w RTK. Wraz ze wzrostem bazy, budżet błędów marginalnie wzrasta, ponieważ wspólne błędy atmosferyczne i wspólne błędy orbit satelitarnych nie są całkowicie eliminowane. Jest to typowe “+1ppm” widoczne w specyfikacjach dokładności pozycji RTK.
Pomiar fazy nośnej i ustalanie niejednoznaczności
Pomiar fazy nośnej, wprowadzony w naszym poprzednim artykule, jest wymagany do zredukowania błędów do poziomu centymetra.
Wyzwanie związane z pomiarami fazy nośnej polega na tym, że są one z natury niejednoznaczne (lub niekompletne). W pomiarze brakuje całkowitej liczby cykli fazy nośnej. Ta brakująca część jest również znana jako “niejednoznaczność”.
Proces pozycjonowania Real-Time Kinematic (RTK) rozpoczyna się od oszacowania tych niejednoznaczności. Proces ten jest również znany jako tryb “RTK Float”. W tym trybie niejednoznaczności powoli zbiegają się, ale nie są wartościami całkowitymi. Pozwala to odbiornikowi na wygładzenie pozycji i osiągnięcie dokładności na poziomie około decymetra.
Aby osiągnąć maksymalną dokładność i niezawodność, następnym krokiem jest identyfikacja wartości całkowitej dla każdej z tych niejednoznaczności w czasie rzeczywistym. Proces ten nazywa się rozwiązywaniem niejednoznaczności całkowitych.
Wynik rozwiązywania niejednoznaczności maksymalizuje dokładność RTK i zapewnia większą niezawodność. Jest to powszechnie określane jako tryb “RTK Fixed”.
Jeśli śledzenie fazy do danego satelity zostanie przerwane, wystąpi zdarzenie ‘poślizgu cyklu’ i niejednoznaczność całkowita dla tego satelity musi zostać ponownie rozwiązana. Z tego powodu zbyt duża liczba poślizgów cykli (a zwłaszcza poślizgi cykli na wszystkich satelitach w tym samym czasie) ma negatywny wpływ na wydajność RTK. Dobra antena i jej umiejscowienie oraz czyste środowisko RF są niezbędne do ograniczenia tych zdarzeń.
Kinematyka post-processingowa
Jak widzieliśmy, RTK to zastosowanie tych poprawek “w czasie rzeczywistym”, co oznacza, że rover musi mieć połączenie danych ze stacją bazową, aby obliczyć przetwarzanie RTK w terenie.
Niektóre aplikacje nie potrzebują trajektorii w czasie rzeczywistym, ale mogłyby skorzystać z większej dokładności lub prostszej konfiguracji. Post Processing Kinematic (PPK) może spełnić te potrzeby. W PPK rover zbiera własne surowe dane GNSS podczas zbierania danych bez otrzymywania poprawek w czasie rzeczywistym. Później dane te są przetwarzane w postprocessingu przy użyciu precyzyjnych informacji ze stacji bazowej lub sieci stacji referencyjnych.
PPK zapewnia większą elastyczność w zbieraniu danych, ponieważ nie polega na poprawkach w czasie rzeczywistym. Jest często używany w scenariuszach, w których komunikacja w czasie rzeczywistym jest trudna lub niepotrzebna, takich jak mapowanie lotnicze, pomiary dronami lub badania naukowe.
Zalety stosowania PPK do korekcji różnicowych.
PPK oferuje następujące kluczowe korzyści podczas przetwarzania GNSS:
- Ulepszony przepływ pracy w terenie: Głównym kosztem misji opartej na RTK jest zapewnienie, że stacja bazowa znajduje się w pobliżu, skonfigurowanie stacji bazowej w razie potrzeby, zapewnienie niezawodnego połączenia danych itp. Qinertia posiada dużą liczbę wbudowanych sieci CORS; oraz bezpośredni dostęp do sieci stron trzecich. Eliminuje to złożoność związaną z zapewnieniem dostępności bazy i konfiguracją niezawodnego połączenia danych.
- Ulepszona kontrola jakości: Wiele wskaźników jakości pomaga ocenić rzeczywistą wydajność przetwarzania. Obejmują one zaawansowane statystyki, separację (różnicę między pozycją/orientacją obliczoną podczas przetwarzania do przodu i do tyłu), a także wskaźniki sygnałów GNSS.
- Ogólna poprawa wydajności: Rozwiązywanie niejednoznaczności RTK może zająć trochę czasu (od kilku sekund do kilku minut, w zależności od odległości od stacji bazowej i warunków atmosferycznych). Może to być istotne na początku akwizycji lub w trudnych warunkach GNSS. PPK łagodzi te efekty poprzez przetwarzanie w kierunku do przodu i do tyłu, aby zmaksymalizować współczynnik poprawnych poprawek. Wydajność można również poprawić, stosując bardziej zaawansowane algorytmy lub dokładne efemerydy satelitarne.
