自動運転車のナビゲーションの強化
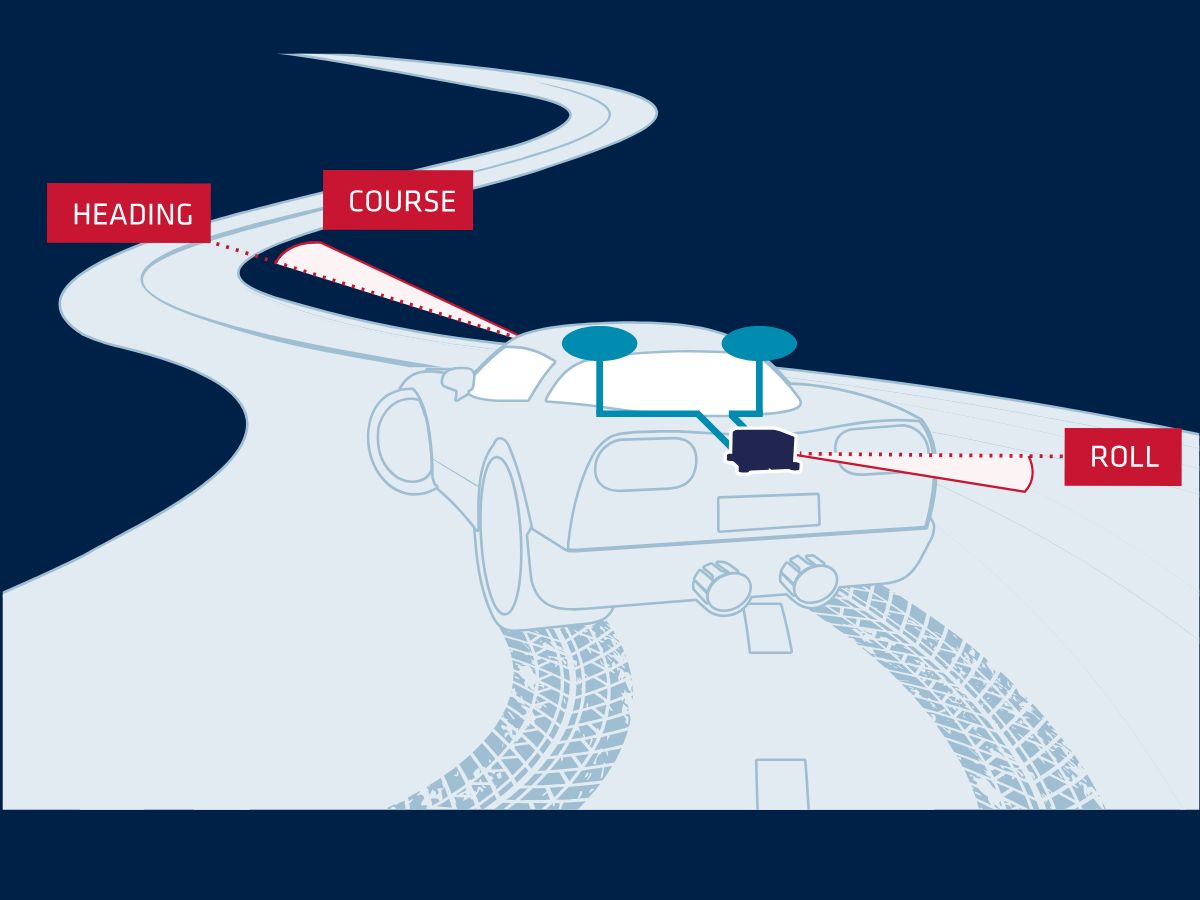
当社の慣性航法システム(INS)は、リアルタイムのロール、ピッチ、およびヘディングを提供し、GNSS受信機と統合して、信号の中断(建物、樹木、トンネルなど)が発生した場合でも精度を維持します。
慣性センサーは、LiDARやカメラなどの追加機器を正確に同期および安定化するためにも使用されます。INSと他のセンサーの統合は、車両の環境を包括的に理解するのに役立ち、より高い精度で複雑で動的なシナリオをナビゲートできるようにします。

自動運転車の安全性と信頼性の向上
自動運転車にとって最も困難な環境の1つは都市部です。都市部では、GNSS信号が高層ビルによって妨げられ、交通状況が急速に変化する可能性があります。INSは、これらの環境を安全にナビゲートするために必要な精度と信頼性を提供します。
当社のINSセンサーは、Micro-Electro-Mechanical Systems(MEMS)テクノロジーを使用しています。これにより、より小型で、より正確で、より電力効率の高いセンサーが可能になり、自動運転車におけるINSの全体的なパフォーマンスが向上します。
自動運転車向け慣性航法システム
当社の慣性航法システムは、都市部の峡谷などの複雑な環境を自信を持ってナビゲートするために必要な、比類のない精度と信頼性を提供するように設計されています。
当社は、お客様の自動運転車システムとシームレスに統合される高度なINSソリューションを作成し、正確な測位とスムーズで正確な制御を保証するリアルタイムデータを提供します。都市部の道路から困難な地形まで、安全で信頼性が高く効率的な自律運転を実現するために必要な、堅牢で高性能なナビゲーション機能でお客様の自動運転車技術を強化します。

自動運転車向けソリューション
革新と精度が融合し、他に類を見ない精度であらゆる移動をガイドする。私たちと一緒に、自律移動体の未来を推進しませんか。自動運転車向けナビゲーションソリューションをご覧ください。

Ellipse-D

Ekinox Micro

Ekinox-D
自律アプリケーションのパンフレット
パンフレットを直接受信箱に届けます。
事例紹介
当社の慣性技術が、ケーススタディのセクションで、自動運転車の状況をどのように変えているかをご覧ください。これらの実世界の例は、当社の高度なセンサーが、最も要求の厳しい条件下でも、正確なナビゲーションと堅牢な性能をどのように実現するかを示しています。
複雑な都市環境での安全性を高める場合でも、GNSS信号が利用できない場合に最適な機能性を確保する場合でも、当社のソリューションは、自動運転車に優れた精度と制御を提供します。



私たちのことを話す
SBG Systemsの技術を採用したイノベーターやクライアントからの直接の声をお聞きください。
彼らの証言や成功事例は、SBG Systemsのセンサーが実際の自律走行車アプリケーションに与える大きな影響を示しています。
自律走行車向けのその他の潜在的なアプリケーションを見る
自律走行車は、輸送業界をはるかに超えて産業を変革しています。農業や物流から、建設や監視まで、高度なナビゲーション技術は、よりスマートで安全、かつ効率的なオペレーションを可能にしています。自律性によって強化された幅広い革新的なアプリケーションをご覧ください。
ご質問はありますか?
ご紹介しているアプリケーションについて、よくあるご質問とその回答をまとめています。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
自動運転車はどのように機能しますか?
自動運転車は、高度なシステムを搭載し、人間の介入なしに自律的にナビゲートおよび制御できる車両です。これらの車両は、自律走行センサーとアルゴリズムを組み合わせて使用し、環境を認識し、意思決定を行い、自動運転タスクを実行します。目標は、車両が運転のあらゆる側面を安全かつ効率的に処理できる完全な自律性を実現することです。
自動運転車は、周囲の状況を認識するために、以下のような主要技術を使用しています。
- GNSS(Global Navigation Satellite System):自動運転車の位置、速度、および方向に関するリアルタイムの更新を取得します。
- INS(慣性航法システム):GNSS信号が途絶えた場合でも精度を維持します。自動運転車の位置、速度、方向に関するリアルタイムの更新を提供します。
- LiDAR(Light Detection and Ranging):レーザービームを使用して、車両の周囲の環境の詳細な3Dマップを作成します。この技術は、他の車両、歩行者、道路標識など、周囲の物体を検出および測定するのに役立ちます。
- レーダー(Radio Detection and Ranging):電波を使用して、物体の速度、距離、方向を検出します。レーダーは、悪天候下や、より長距離で物体を検出する場合に特に役立ちます。
- カメラ:車載環境に関する視覚情報(車線表示、交通信号、道路標識など)をキャプチャします。複雑な視覚的な合図を解釈し、視覚データに基づいて意思決定を行うために不可欠です。
自動車のADASと自動運転車の違いは?
ADAS(先進運転支援システム)は、車線維持、アダプティブクルーズコントロール、自動ブレーキなどの機能を提供することで運転の安全性を高めますが、ドライバーによる積極的な監視が必要です。対照的に、自動運転車は、自律運転システムを搭載し、人間の介入なしに車両の操作を完全に自動化することを目指しています。
ADASが作業の補助や安全性の向上によってドライバーをサポートするのに対し、自動運転車はナビゲーションから意思決定まで、自律運転のあらゆる側面を扱うように設計されており、より高いレベルの自動化(SAEレベル)と利便性を提供する。ADASの特性や機能はSAEレベル3以下に、自動運転車は最低レベル4に相当する。