自動運転車技術:チューリッヒUASレーシングがEllipse-Dで挑むナビゲーション
チューリッヒUASレーシング(Zurich UAS Racing)は、これまで自動運転を不可能にしていた重大な位置ずれの課題を解決しました。この自動運転車工学における画期的な進歩により、チームは有名なフォーミュラ・スチューデント(Formula Student)競技のオートクロス種目への挑戦をスタートさせることができるようになりました。
Ellipse-Dによって、私たちは車両のトラック上での絶対位置を把握できるようになりました。正確な位置は、無人運転システムの運用に不可欠です。私たちの最大の課題の一つは、時間経過による位置ずれでした。Ellipse-D を使うことで、これまで不可能だったオートクロス競技に挑戦できるようになります。 | Finn Scheller 氏、Zurich UAS Racing Team C-Leader

自動運転車工学におけるチームの背景
Zurich UAS Racing(ZUR)は、スイスのヴィンタートゥールにあるチューリッヒ応用科学大学の熱心な学生フォーミュラチームです。2019年に設立されたこの意欲的な学生団体は、世界最大のエンジニアリング競技会であるフォーミュラ・スチューデントに参加し、電気自動車と自動運転車を製作して世界中の大学と競い合っています。

チームは成長を続け、現在ではさまざまな学科から集まった70人以上の意欲的な学生が所属しています。彼らは皆、レース性能の最適化と自動運転車工学の発展という共通の目標に向かって団結しています。
Formula Student
国際的に高く評価されているFormula Student競技は、学生チームにフォーミュラレーシングカーの設計・製作を課し、エンジニアリングデザイン、コスト分析、ダイナミックなトラック競技など、多様な種目で競い合います。

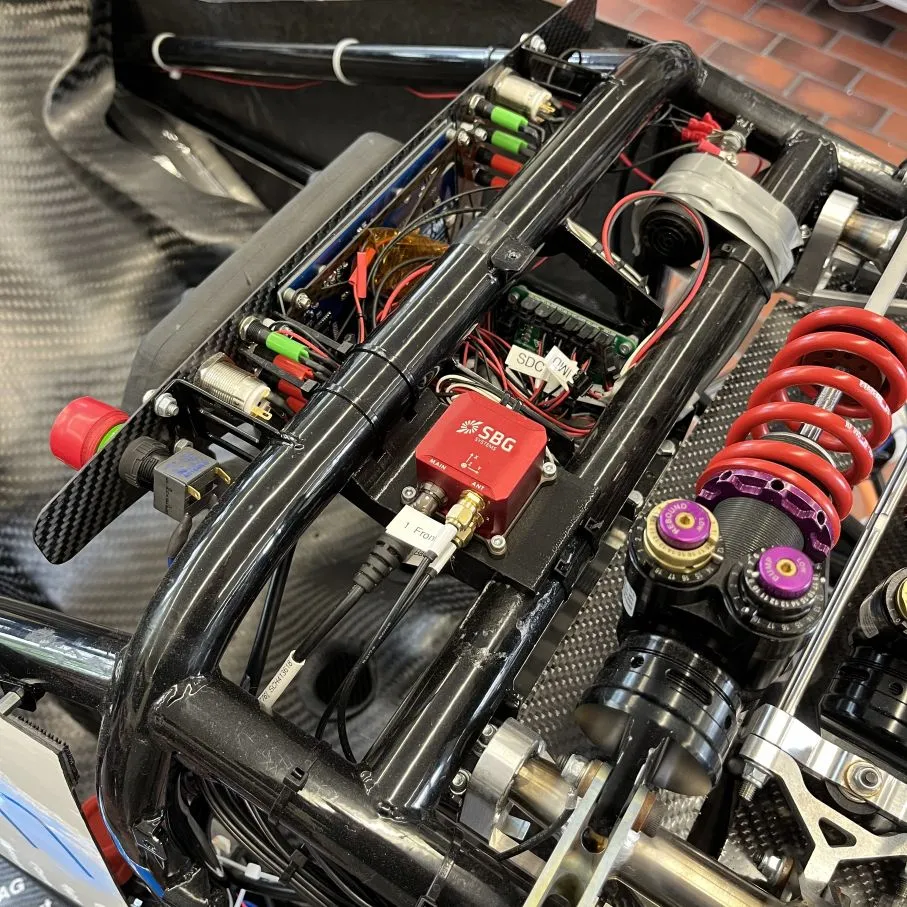
車両:ZUR04
ZURの挑戦は、2021年に最初の実動車を完成させたことから始まり、2022年以降は電気自動車(EV)イベントに参加し、成果を上げています。彼らの無人レーシングカー「ZUR04」は、学生による自律走行車工学の最先端を代表する車両で、4つの電気ホイールハブモーターが合計140 kWの出力を生成し、わずか2.5秒で0から100 km/hまで加速可能です。
この車両は、人間が運転するレースと自律走行レースの両方に対応しており、プロのレーシングカーに匹敵する性能を持っています。無人運転システムは現在テスト中です。
ZURの技術要件
ZUR は、自律型レーシングシステムとシームレスに統合でき、且つ高速競技の厳しい要件を満たす高度な慣性航法システム (INS)を必要としていました。
最大の課題は、従来のローカリゼーションシステムが時間の経過とともに位置ずれを起こしやすく、レースのようなダイナミックな環境では信頼性の高い測位が困難であることでした。
彼らの無人運転システムを運用するには、特に複雑なパイロン配置の中を正確に走行することが求められるオートクロス種目において、絶対位置の精度が不可欠だったのです。
つまり、重要な課題は以下の通りです:
- 位置ずれ(Position Drift): 時間の経過とともに大きなズレが生じ、正確な自己位置推定ができなくなります。
- オートクロスでの制約:測位の問題により、オートクロス種目への出場はできません。
- 限られたデータ分析:ソフトウェア最適化に必要な車両挙動データが不足しています。

つまり、必要だったのは次のような要件です。
- 高精度な自己位置推定: トラック上での絶対位置が必要
- ROS統合: 既存のROSベース自動運転システムとシームレスに統合
- コンパクトな構成:軽量かつ優れた出力重量比
- オープンなドキュメント: 技術資料への容易なアクセス
- 高ダイナミクス対応: 過酷なレース環境に対応する能力
ZUR の状況を評価した結果、私たちは高精度と信頼性が求められる厳しい用途向けに設計された慣性航法システム (INS) であるEllipse-Dを提案しました。
私たちの自動運転レーシング向けのソリューション:Ellipse-D
Ellipse-D は、超小型のデュアルアンテナ RTK GNSS/INS システムで、ダイナミックなレーシング用途においてセンチメートル単位の高精度な位置測位と正確なヘディング情報を提供します。
この技術は、自動運転車工学ソリューションにおける大きな進歩を表しており、チームに以下のメリットをもたらします。
- 高精度: センチメートル単位の位置精度で、自動運転レーシングにおける正確なコース走行や障害物回避を実現。
- デュアルアンテナ方位測定: 電動モーターや電子機器からの磁気干渉によって伝統的なコンパスが影響を受ける環境でも、高い性能を発揮。
- レーシング対応: コンパクトで堅牢な設計により、高い動的負荷がかかるレーシング環境に適応。優れた振動耐性と耐熱性の保持。

最後に、ZUR社の目標に不可欠な4つ目のポイントは、ROSとの統合でした。彼らの言葉を借りれば、他の機能と組み合わせることで、このパッケージは市場で最も費用対効果の高いソリューションとなりました。
「当社にとっての主なセールスポイントは、オープンソースのドキュメントとインターフェースライブラリでした。ROS による完全なサポートも、当社の車がすでに ROS を実行しているため、大きな利点です。そのため、統合は簡単でした。また、SBG Systems の製品のおかげで、当社のパフォーマンスを向上させるための SBG System のサポートにも感謝しています。このような製品の他のサプライヤーと比較して、SBG Systems は最高の費用対効果を提供してくれました」と Scheller 氏は強調します。
高度な統合と性能
統合プロセスは、Ellipse-D の汎用性と SBG Systems のサポートアプローチの有効性を示しました。RaspberryPi と NVIDIA Jetson コンピューティングプラットフォームの両方に接続されたこのシステムは、包括的なデータアクセスと処理のために、sbgECom ライブラリと ROS2 パッケージの両方を利用しています。
このアーキテクチャにより、カスタムアルゴリズム開発に必要な柔軟性を維持しながら、自律システム全体にリアルタイムのナビゲーションデータ配信が可能です。
また、チームはINSデータを利用した高度なトルクベクタリングアルゴリズムを開発するために、Ellipse-Dの機能も活用しています。さらに、正確なトラックのグラウンドトゥルースを提供するために、GNSS RTKベースのローバーと基地局も構築しました。
INSを彼らのドライバーレスカーZUR04に統合することに加え、今年の夏に予定されているトラックテストでは、チームは新しく製造したレースカーZUR05にもINSを組み込みました。Ellipse-Dは、来シーズンのドライバーレス車両ZUR06の主要コンポーネントにもなります。
チューリッヒ UAS レーシングのトップ3
ZUR は、SBG Systems との連携で気に入っている 3 つの優れた点を強調しました。
- オープンソース: まず、教育ミッションと開発方法論に合致するオープンソースのアプローチが評価されました。透明性の高いドキュメントとインターフェースライブラリにより、学生は特定のニーズに応じてシステムを理解し、変更することができ、自律走行車エンジニアリングにおいて非常に貴重な学習機会が得られます。
- 優れたドキュメント: チームは、統合プロセスを合理化した包括的でオープンに利用可能な製品ドキュメントを高く評価しました。技術的な詳細が限られている多くの商用システムとは異なり、SBG Systems のアプローチにより、迅速な理解と実装が可能になりました。
- 良好なコミュニケーション: 最後に、彼らは卓越したコミュニケーションとサポートを強調し、常に意見を聞いてもらえ、すべての質問に対する回答を受け取ることができたと述べています。この迅速なサポートは、厳しい競争期限内で作業する学生チームにとって非常に重要であることが証明されました。
結論
この導入により、ZURがオートクロス競技への参加を妨げていた最も重要な課題である位置ドリフトが解決されました。Ellipse-Dのセンチメートルレベルの精度とデュアルアンテナによる方位決定により、チームは現在、次世代のレーシングカーで次のシーズン(2026年夏)にドライバーレスで競技に参加することを目標に、試運転を開始できます。

このコラボレーションは、自動運転車技術の進歩における産学連携の力を示す好例です。
“Ellipseは、INSシステムへの完璧なエントリーポイントです。将来的には、新たに開発したEthernetベースの車両システムと組み合わせて、より強力なシステムを使用する予定です”と、Scheller氏は結論付けています。
ZURのような学生チームをサポートするという当社のコミットメントは、プロレベルのナビゲーション技術へのアクセスを提供することで、次世代のエンジニアが自動運転レースで何が可能かの限界を押し広げることができることを示しています。
Ellipse-D
Ellipse-D は、小型で高性能なGNSS支援型慣性航法システムで、信頼性の高い方位、位置、および上下動揺(ヒーブ)計測を提供します。
IMU とデュアルバンド GNSS 受信機を組み合わせ、センサーフュージョンアルゴリズムを用いて、過酷な環境下でも高精度な測位を実現します。
静止状態での正確なヘディング測定のために、デュアルアンテナ機能を備えています。

Ellipse-D の見積もりを依頼する
ご質問はありますか?
FAQセクションへようこそ!ここでは、ご紹介するアプリケーションに関する最も一般的な質問への回答をご覧いただけます。お探しの情報が見つからない場合は、お気軽にお問い合わせください。
自動運転車はどのように機能しますか?
自動運転車は、高度なシステムを搭載し、人間の介入なしに自律的にナビゲートおよび制御できる車両です。これらの車両は、自律走行センサーとアルゴリズムを組み合わせて使用し、環境を認識し、意思決定を行い、自動運転タスクを実行します。目標は、車両が運転のあらゆる側面を安全かつ効率的に処理できる完全な自律性を実現することです。
自動運転車は、周囲の状況を認識するために、以下のような主要技術を使用しています。
- GNSS (Global Navigation Satellite System):自動運転車の位置、速度、および方向に関するリアルタイムの更新を取得します。
- INS(慣性航法システム):GNSS信号が途絶えた場合に精度を維持します。自動運転車の位置、速度、方向に関するリアルタイムの更新を提供します。
- LiDAR(Light Detection and Ranging):レーザービームを使用して、車両の周囲の環境の詳細な3Dマップを作成します。この技術は、他の車両、歩行者、道路標識など、周囲の物体を検出および測定するのに役立ちます。
- レーダー(Radio Detection and Ranging):電波を使用して、物体の速度、距離、方向を検出します。レーダーは、悪天候下や、より長距離で物体を検出する場合に特に役立ちます。
- カメラ:車載環境に関する視覚情報(車線表示、交通信号、道路標識など)をキャプチャします。複雑な視覚的な合図を解釈し、視覚データに基づいて意思決定を行うために不可欠です。
車両における自動化の6段階とは?
自動運転車の6つのレベルは、自動車技術者協会(SAE)がJ3016規格で定義しており、車両の自動化の度合いを記述しています。以下にその内訳を示します。
- レベル0:自動化なし。自動緊急ブレーキや死角警告など、警告または一時的なアシスタンスはありますが、持続的な自動化はありません。
- レベル1:運転支援。アダプティブクルーズコントロール(速度と距離の維持)や車線維持支援など、サポートのための単一の自動化システム。
- レベル2:部分的な自動化。ステアリングや加速/減速など、システムの組み合わせですが、意思決定は行いません。
- レベル3:条件付き自動化。特定の条件(高速道路での運転など)で、自動車がほとんどの運転タスクを処理します。システムは環境を監視できます。
- レベル4:高度な自動化。自動車は、事前に定義されたシナリオで自律的に動作します。これらの領域では、ドライバーの注意は必要ありません。
- レベル5:完全な自動化。車両は、人間のドライバーが処理できるすべての環境ですべてのタスクを実行できます。ステアリングホイールやペダルがない場合があります。
これらのレベルは、人間が制御する車両から、すべての運転タスクを処理できる完全自律型システムへの進歩を示しています。
INSは外部支援センサーからの入力を受け入れますか?
当社の慣性航法システムは、空気データセンサー、磁力計、走行距離計、DVL 外部補助センサーからの入力を受け付けます。
この統合により、特にGNSSが利用できない環境において、INSは非常に汎用性が高く信頼性の高いものになります。
これらの外部センサーは、補完的なデータを提供することにより、INSの全体的なパフォーマンスと精度を向上させます。
IMUとINSの違いは何ですか?
慣性計測ユニット(IMU)と慣性航法システム(INS)の違いは、その機能と複雑さにあります。
IMU 慣性計測装置)は、加速度計やジャイロスコープによって測定された、車両の直線加速度および角速度に関する生データを提供します。IMUは、ロール、ピッチ、ヨー、および運動に関する情報を提供しますが、位置や航法データを計算することはありません。IMU 、位置や速度を決定するための外部処理に向けて、運動や姿勢に関する必須データを中継するように特別にIMU 。
一方、INS 慣性航法システム)は IMU のデータと高度なアルゴリズムを組み合わせて、時間の経過に伴う車両の位置、速度、および姿勢を算出します。これには、センサーフュージョンや統合のためのカルマンフィルタリングなどのナビゲーションアルゴリズムが組み込まれています。INS 、GNSSのような外部測位システムに依存することなく、位置、速度、姿勢を含むリアルタイムのナビゲーションデータINS 。
このナビゲーションシステムは、特に軍事用UAV、船舶、潜水艦など、GNSS環境において、包括的なナビゲーションソリューションを必要とする用途で一般的に利用されています。
AHRSとINSの違いは何ですか?
Attitude and Heading Reference System(AHRS)とInertial Navigation System(INS)の主な違いは、その機能と提供するデータの範囲にあります。
AHRS は、車両またはデバイスの姿勢(ピッチ、ロール)および方位(ヨー)に関する情報を提供します。通常、ジャイロスコープ、加速度計、磁力計などのセンサーの組み合わせを使用して、姿勢を計算および安定化します。AHRS は、3 軸(ピッチ、ロール、ヨー)の角度位置を出力し、システムが空間内での姿勢を理解できるようにします。航空、UAV、ロボット工学、および海洋システムで、正確な姿勢および方位データを提供するために使用されることが多く、これは車両の制御および安定化に不可欠です。
INSは、姿勢データ(AHRSなど)を提供するだけでなく、車両の位置、速度、および加速度を時間とともに追跡します。慣性センサーを使用して、GNSSのような外部参照に依存せずに、3D空間での動きを推定します。AHRS(ジャイロスコープ、加速度計)にあるセンサーを組み合わせますが、位置と速度の追跡のためのより高度なアルゴリズムも含まれる場合があり、多くの場合、精度を高めるためにGNSSのような外部データと統合されます。
要約すると、AHRSは向き(姿勢と方位)に焦点を当てていますが、INSは位置、速度、向きを含むナビゲーションデータの完全なスイートを提供します。
