Los robots arrasan con nuestros sensores
"Los productos de SBG Systems son de primera línea y proporcionan toda la exactitud y precisión que necesitamos. Es importante destacar que la documentación y el soporte son de primera categoría, lo que es especialmente beneficioso para estudiantes como nosotros. Un agradecimiento al Sr. Jérémy Colombel y al Sr. Nicolas Michel aquí en Singapur, que nos han sido de gran ayuda". | Isabella Lu, Ingeniera Eléctrica, Equipo Bumblebee

El Team Bumblebee une a estudiantes innovadores de CDE, SoC y la Escuela de Negocios de la NUS en la Universidad Nacional de Singapur. Además, prevén la creación de los sistemas autónomos del futuro. De hecho, el equipo diseña y construye vehículos marítimos que navegan bajo el agua y en la superficie. Además, su objetivo es avanzar en la autonomía en entornos marinos difíciles.
Finalmente, estudiantes de Ingeniería Mecánica, Eléctrica, Informática, Ciencias de la Computación y Empresariales contribuyen con diversos conocimientos al equipo.

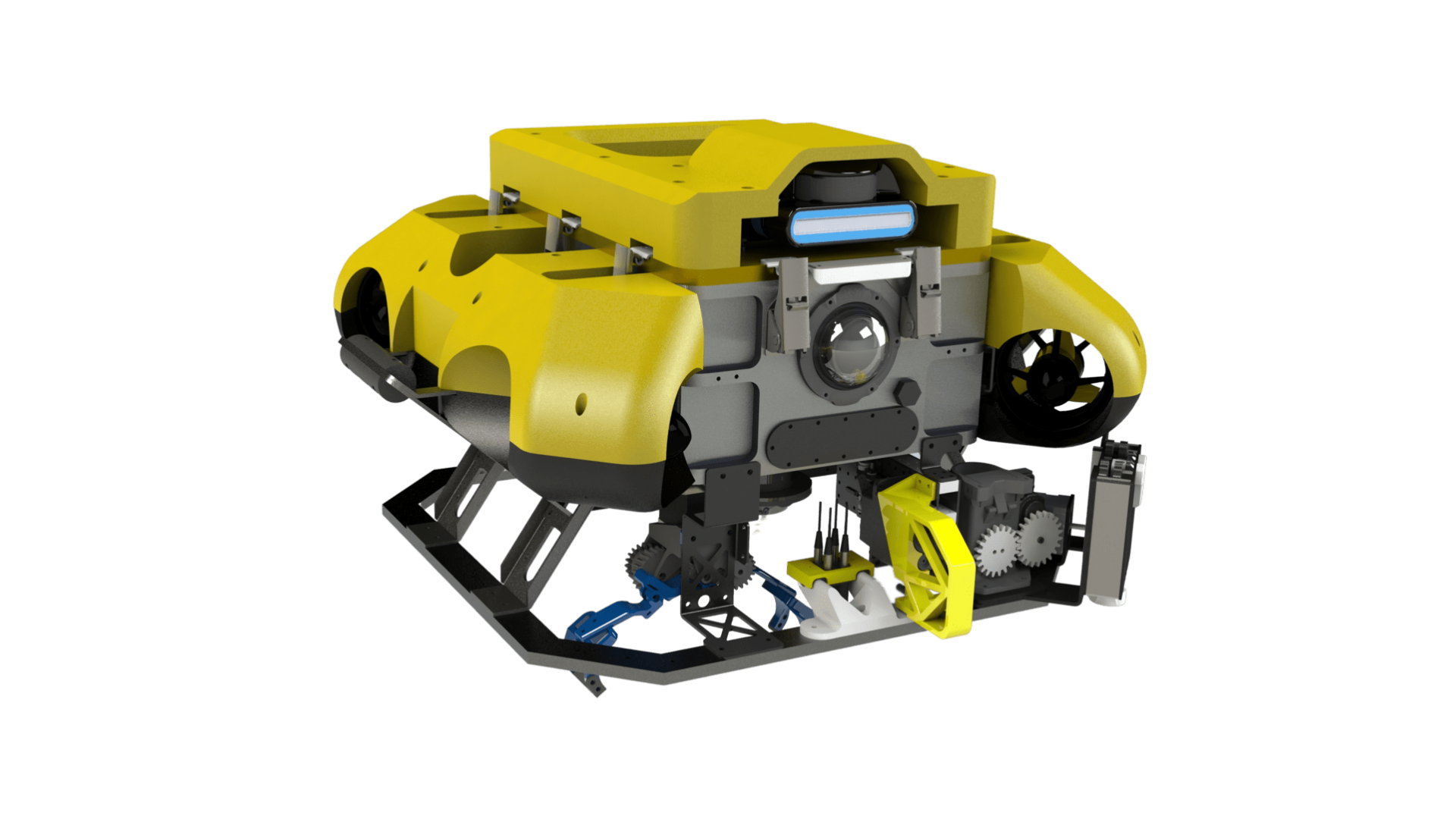
El sistema actual del equipo Bumblebee consta de tres vehículos con capacidad autónoma: BBAUV4.1 (Vehículo Submarino Autónomo), ASV 3.0 (Embarcación de Superficie Autónoma) y Jellyfish (Vehículo Aéreo No Tripulado).
Estos vehículos han logrado un éxito notable en competiciones internacionales, como el RoboSub Challenge y RobotX.
Una necesidad de un INS preciso y robusto
El equipo Bumblebee necesitaba una IMU de alta precisión, robusta y de baja latencia con una unidad GPS para lograr una localización y navegación precisas en un entorno marítimo. Sus requisitos clave incluían:
- Precisión de Roll & Pitch inferior a 1 grado.
- Compatibilidad con Ubuntu, preferiblemente con un controlador ROS o un controlador de terceros disponible.
- Blindaje magnético incorporado adecuado para evitar interferencias.
- Conectores robustos y estándar.
- Soporte para posicionamiento RTK (Real-Time Kinematic).
Estos sensores se montarían en una plataforma WAM-V modificada utilizada para misiones autónomas en el entorno marítimo, lo que permitiría la navegación, la evitación de obstáculos, la detección de objetos y la planificación de misiones.
¿Por qué el equipo Bumblebee eligió SBG Systems?
El Team Bumblebee llevó a cabo una evaluación exhaustiva de varios proveedores de IMU. De hecho, decidieron asociarse con SBG Systems debido a varios factores clave:
1 – Carcasa resistente a la intemperie: Los sensores de SBG Systems venían con carcasas IP-68 resistentes a la intemperie, lo que los hacía adecuados para aplicaciones marítimas.
2 – Credibilidad del fabricante: La reputación de SBG Systems en el campo de los sensores inerciales y los sistemas de navegación desempeñó un papel importante en su decisión.
3 – Avances técnicos: El sensor Ellipse-D de SBG Systems ofrecía características avanzadas, incluyendo GPS de doble antena y datos de rumbo mejorados, reduciendo la necesidad de calibración del magnetómetro.
4 – Soporte experto: El equipo Bumblebee recibió valiosos consejos técnicos de los expertos que estuvieron siempre disponibles para ayudar.
Orientación precisa y soporte sólido
Después de integrar el Ellipse-D de SBG Systems en sus sistemas, el equipo Bumblebee experimentó mejoras significativas:
- GNSS de doble antena: La adición de GNSS de doble antena eliminó la influencia de la interferencia magnética, proporcionando datos de orientación precisos y lecturas de guiñada absolutas, cruciales para la navegación sobre cuerpos de agua.
- Calibración del giróscopo: El equipo recibió el apoyo de los ingenieros de SBG Systems para solucionar los problemas de deriva del giróscopo y garantizar un rendimiento estable.
Una combinación perfecta
El Ellipse-D se adaptó perfectamente a las limitaciones de la aplicación ASV del equipo Bumblebee, proporcionando la precisión, robustez y facilidad de integración necesarias.
El equipo Bumblebee apreció varias ventajas de utilizar los productos de SBG Systems:
✦ Soporte rápido: El equipo de soporte proporcionó asistencia oportuna cuando fue necesario.
✦ Documentación detallada: Se dispuso de hojas de datos completas y guías de aplicación, lo que ayudó en la integración y la resolución de problemas.
✦ Facilidad de integración: Los sensores de SBG Systems se diseñaron con orificios de montaje y conectividad USB "plug-and-play", lo que simplificó la integración.
✦ Precios con descuento: Los precios rentables fueron beneficiosos para un proyecto dirigido por estudiantes.
✦ Carcasa impermeable y duradera: Las carcasas resistentes a la intemperie de los sensores de SBG Systems contribuyeron a su durabilidad en entornos marítimos.
Tres cosas que el equipo Bumblebee adora de nosotros
1 – Sinceridad y compromiso: SBG Systems demostró un notable compromiso para apoyar al equipo Bumblebee más allá de una típica relación proveedor-cliente, haciendo un esfuerzo adicional para ayudar al éxito del equipo.
2 – Pasión y dedicación de los ingenieros: La pasión y el conocimiento de los ingenieros de soporte de SBG Systems resonaron con el amor del equipo Bumblebee por la robótica y la tecnología.
3 – Amplia documentación y soporte: La extensa documentación y el soporte, junto con la asistencia del equipo de ventas, facilitaron el proceso de integración para el equipo de estudiantes.
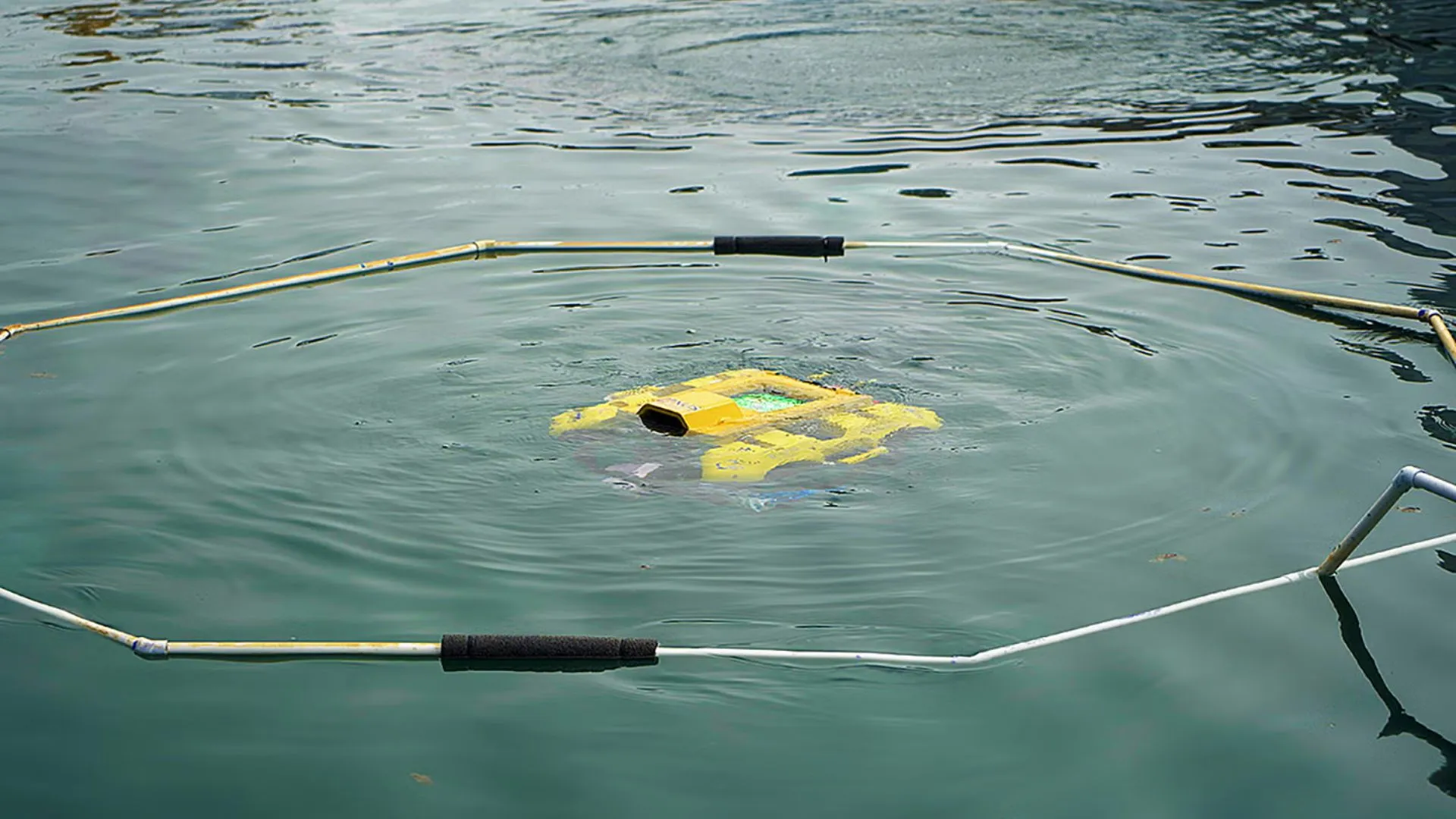
Bumblebee participó recientemente en el Maritime Robosub Challenge 2023 celebrado en las instalaciones de Transdec de la Marina de los EE. UU. en San Diego, California, con un total de 35 equipos de 5 países. Surgieron como campeones, junto con los otros logros enumerados a continuación.
Premios RoboSub 2023:
- 1er lugar en el Autonomy Challenge
- 1er lugar en System Assessment
- 1er lugar en Website
- Segundo lugar en Documentación de Diseño
SBG Systems extiende sus mejores deseos al equipo Bumblebee para todos sus futuros proyectos.
Ellipse-D
El Ellipse-D es un sistema de navegación inercial que integra una doble antena y un GNSS RTK de doble frecuencia que es compatible con nuestro software de post-procesamiento Qinertia.
Diseñado para aplicaciones robóticas y geoespaciales, puede fusionar la entrada del odómetro con Pulse o CAN OBDII para mejorar la precisión de la navegación a estima.

Solicite un presupuesto para Ellipse-D
¿Tiene alguna pregunta?
¡Bienvenido a nuestra sección de preguntas frecuentes! Aquí encontrará respuestas a las preguntas más comunes sobre las aplicaciones que mostramos. Si no encuentra lo que busca, ¡no dude en ponerse en contacto con nosotros directamente!
¿Qué es el sistema de guía inercial de un USV?
Un sistema de guiado inercial para un vehículo de superficie no tripulado (USV) es crucial para una navegación y un control precisos, especialmente cuando el GNSS no está disponible. Los sensores inerciales rastrean el movimiento y la orientación, lo que permite una navegación eficaz en entornos difíciles.
Los sistemas de navegación inercial (INS) integran los datos de la IMU con otros sistemas, como el GNSS o los sensores Doppler Velocity Logs, para mejorar la precisión. También emplean algoritmos de navegación, como el filtro de Kalman, para calcular la posición y la velocidad.
Los sensores inerciales admiten el funcionamiento autónomo, proporcionando datos precisos de rumbo y posición para diversas aplicaciones. Garantizan un funcionamiento eficaz en condiciones de denegación de GNSS y permiten ajustes en tiempo real para mejorar la maniobrabilidad.
¿Cuál es la diferencia entre IMU e INS?
La diferencia entre una unidad de medición inercial (IMU) y un sistema de navegación inercial (INS) radica en su funcionalidad y complejidad.
Una IMU unidad de medición inercial) proporciona datos brutos sobre la aceleración lineal y la velocidad angular del vehículo, medidos por acelerómetros y giroscopios. Proporciona información sobre el balanceo, el cabeceo, el guiñada y el movimiento, pero no calcula datos de posición ni de navegación. La IMU diseñada específicamente para transmitir datos esenciales sobre el movimiento y la orientación para su procesamiento externo con el fin de determinar la posición o la velocidad.
Por otro lado, un INS sistema de navegación inercial) combina IMU con algoritmos avanzados para calcular la posición, la velocidad y la orientación de un vehículo a lo largo del tiempo. Incorpora algoritmos de navegación como el filtrado de Kalman para la fusión e integración de sensores. Un INS datos de navegación en tiempo real, incluyendo posición, velocidad y orientación, sin depender de sistemas de posicionamiento externos como GNSS.
Este sistema de navegación se utiliza normalmente en aplicaciones que requieren soluciones de navegación completas, especialmente en entornos GNSS, como los UAV militares, los buques y los submarinos.
